
पाठ 3: डिस्क चुनने के लिए रिपोर्ट किए गए सेंसर फीडबैक का उपयोग करना
यह पाठ पाठ 2 के समान चुनौती को हल करने के लिए रिपोर्ट किए गए सेंसर फीडबैक का उपयोग करेगा। वी.आर. रोबोट पहली नीली डिस्क को उठाएगा और उसे नीले गोल में ले जाएगा।
-
VEXcode VR में एक नया प्रोजेक्ट शुरू करें और प्रोजेक्ट का नाम Unit8Lesson3रखें।

-
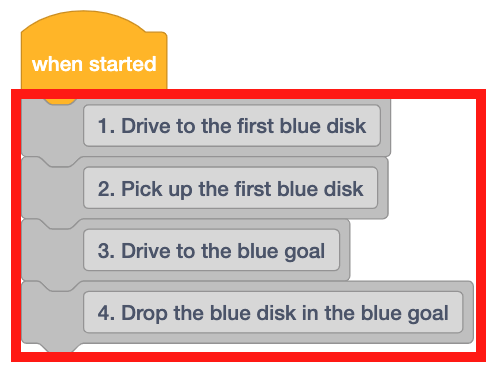
चार टिप्पणी ब्लॉकों को कार्यक्षेत्र में खींचें. वीआर रोबोट को पहली डिस्क तक ले जाने, उसे उठाने और नीले लक्ष्य पर वापस लाने के लिए आवश्यक प्रत्येक चरण के लिए टिप्पणियां जोड़ें।
-
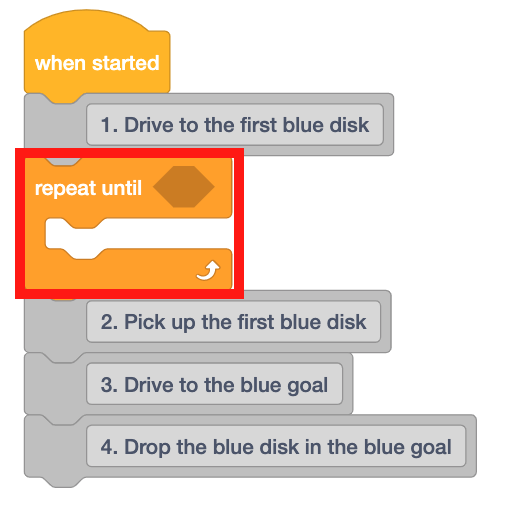
[Repeat until] ब्लॉक को पहली टिप्पणी के नीचे कार्यक्षेत्र में खींचें.
आपकी जानकारी के लिए
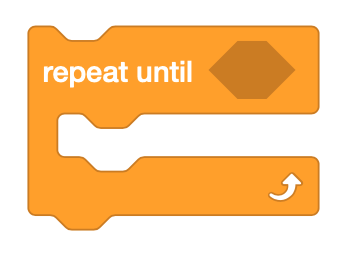
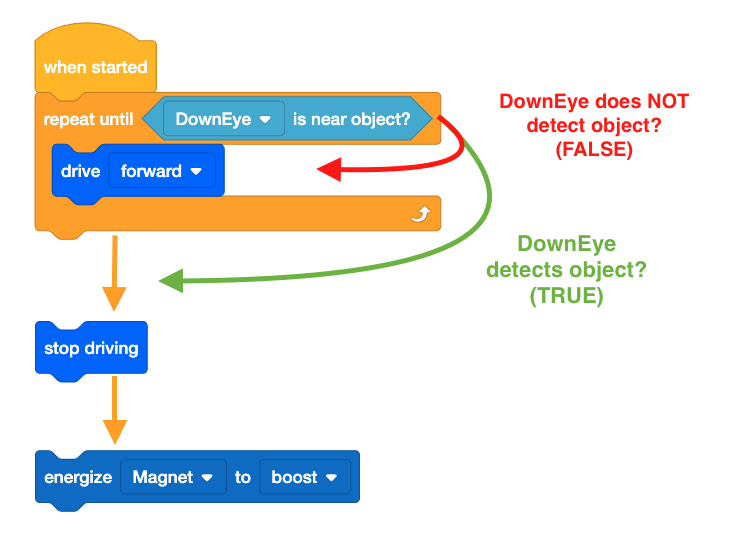
[Repeat until] ब्लॉक एक C ब्लॉक है जो बूलियन रिपोर्टर ब्लॉक स्वीकार करता है। [Repeat until] ब्लॉक केवल प्रत्येक लूप की शुरुआत में बूलियन स्थिति की जांच करेगा। यदि बूलियन स्थिति को गलत बताया जाता है, तो अंदर के ब्लॉक चलेंगे। यदि बूलियन स्थिति को सत्य बताया जाता है, तो अंदर के ब्लॉक को छोड़ दिया जाएगा।
-
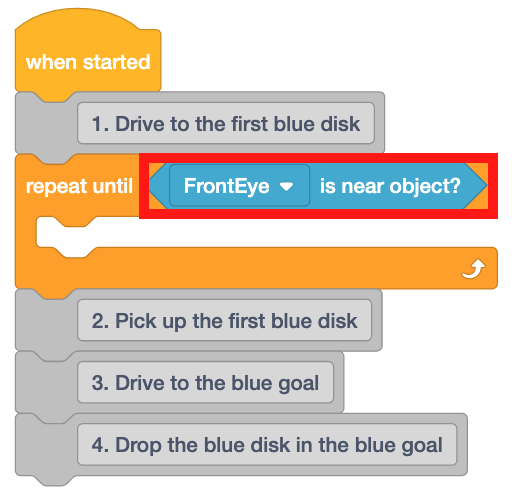
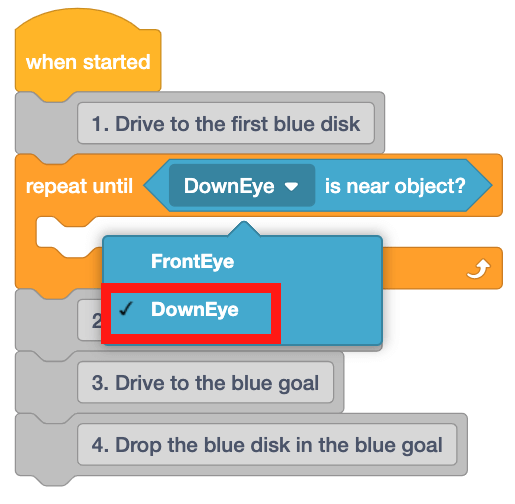
जब VR रोबोट डिस्क मूवर प्लेग्राउंडपर रंगीन डिस्क का पता लगाता है, तो <Eye Sensor near object> ब्लॉक TRUE रिपोर्ट करता है। इस ब्लॉक को प्रोजेक्ट में खींचें.
-
डिस्क मूवर प्लेग्राउंड पर डिस्क प्लेग्राउंड के फर्श पर हैं और फ्रंट आई सेंसर द्वारा उनका पता नहीं लगाया जा सकता है। इस कारण से, <Eye Sensor near object> ब्लॉक को 'डाउनआई' पर सेट करें।
-
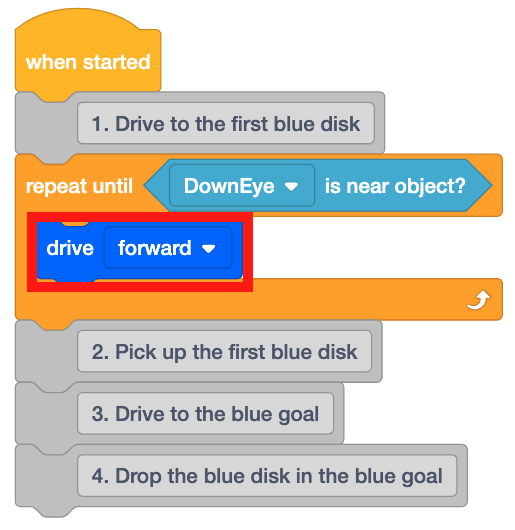
[Repeat until] ब्लॉक के अंदर के ब्लॉक तब चलेंगे जब VR रोबोट किसी वस्तु का पता नहीं लगाएगा। किसी एक डिस्क तक पहुंचने के लिए, वीआर रोबोट को तब तक आगे बढ़ना होगा जब तक कि डिस्क का पता न चल जाए।

-
[ड्राइव] ब्लॉक को [दोहराएँ] ब्लॉक में खींचें.
-
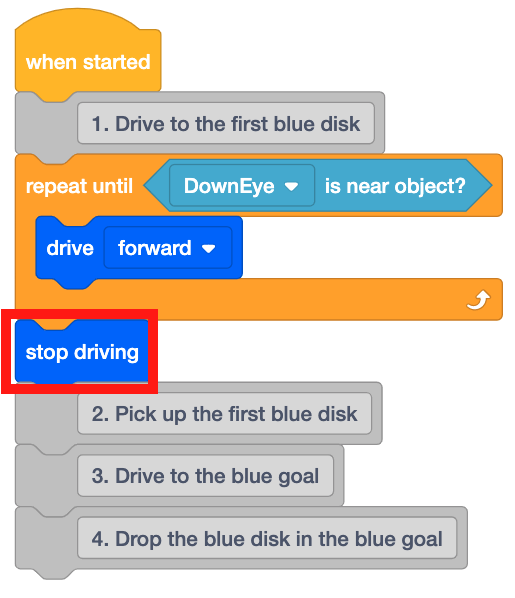
जब कोई डिस्क का पता चलता है, तो वीआर रोबोट को उसे उठाने के लिए गाड़ी रोकनी होगी। [ड्राइविंग रोकें] ब्लॉक को खींचें और इसे [जब तक दोहराएं] ब्लॉक के नीचे रखें।
-
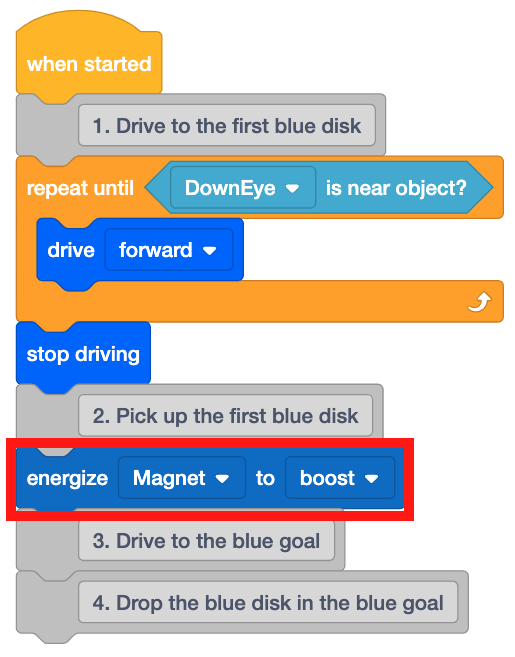
अब, वीआर रोबोट को दूसरी टिप्पणी के नीचे [एनर्जाइज़ इलेक्ट्रोमैग्नेट] ब्लॉक रखकर इलेक्ट्रोमैग्नेट के साथ डिस्क को उठाने का निर्देश दें।
- यदि डिस्क मूवर प्लेग्राउंड पहले खुला नहीं है तो उसे खोलें और प्रोजेक्ट चलाएं।
-
वीआर रोबोट तब तक आगे बढ़ता रहता है जब तक डाउन आई सेंसर द्वारा पहली नीली डिस्क का पता नहीं लग जाता, वह चलना बंद कर देता है, तथा डिस्क को उठाने के लिए इलेक्ट्रोमैग्नेट को सक्रिय कर देता है।

- ध्यान दें कि इस प्रोजेक्ट में [Repeat until] ब्लॉक कैसे काम करता है।
- जब वीआर रोबोट पर डाउन आई सेंसर किसी वस्तु का पता लगा लेता है, तो प्रोजेक्ट [Repeat until] ब्लॉक के नीचे स्टैक में अगले ब्लॉक पर चला जाता है।
- इस परियोजना में, इसका मतलब था कि वीआर रोबोट ने गाड़ी चलाना बंद कर दिया और इलेक्ट्रोमैग्नेट को सक्रिय कर दिया।
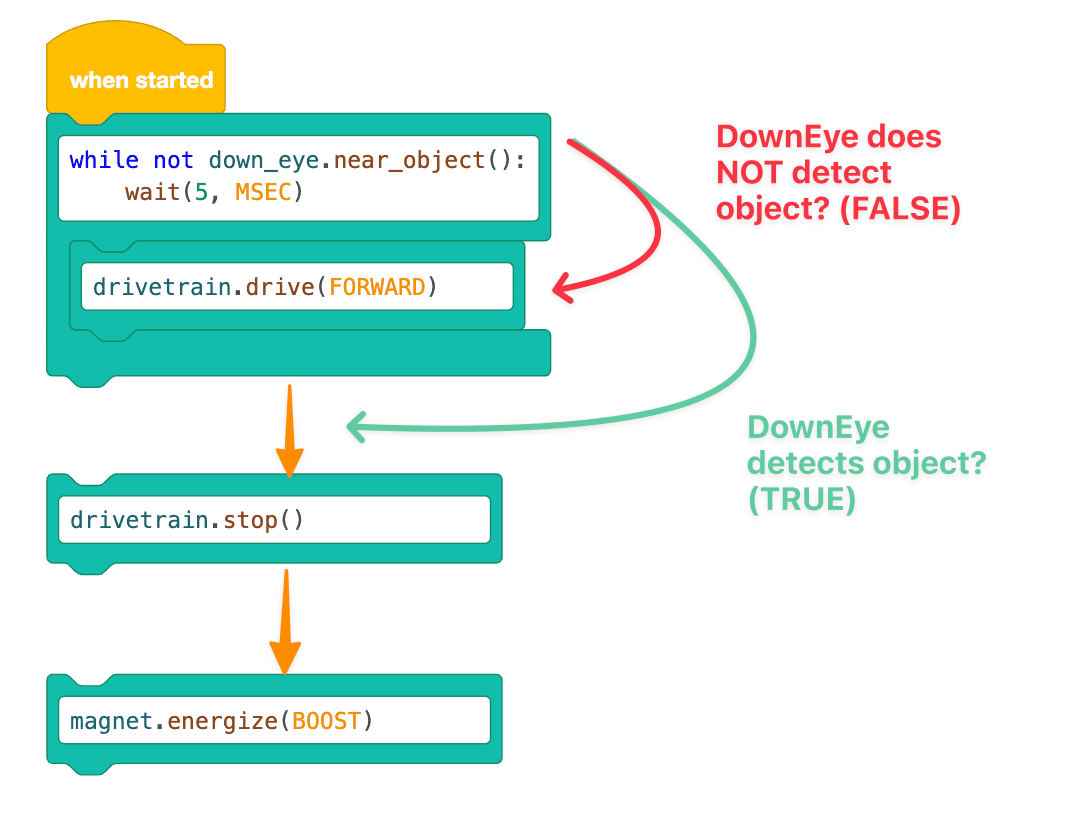
स्विच ब्लॉक का उपयोग करना
नीचे दी गई छवि स्विच ब्लॉक का उपयोग करके इस पाठ के वर्कफ़्लो ग्राफ़िक को प्रदर्शित करती है। इस ग्राफिक की तुलना ऊपर दिए गए ग्राफिक से करने से आपको नए स्विच पायथन कमांड के वर्कफ़्लो को बेहतर ढंग से समझने में मदद मिल सकती है जिसे आप सीख रहे हैं।
इस पाठ के शेष भाग को जारी रखने के लिए अगला बटन का चयन करें।