
पाठ 3: लक्ष्य में डिस्क रखने के लिए रिपोर्ट किए गए सेंसर फीडबैक का उपयोग करना
पाठ 2 में, वी.आर. रोबोट डिस्क को छोड़ने के लिए प्रारंभिक बिंदु पर उल्टी दिशा में वापस चला गया। इसके लिए उपयोगकर्ता को वीआर रोबोट द्वारा तय की जाने वाली सटीक दूरी की गणना करनी होती थी। यह हमेशा संभव नहीं हो सकता. इसके बजाय, वीआर रोबोट रिपोर्ट किए गए सेंसर मानों का उपयोग करके डिस्क को लगातार सटीकता के साथ उठा और छोड़ सकता है।
पाठ 3 में रिपोर्ट किए गए सेंसर फीडबैक का उपयोग करके यह निर्धारित किया गया है कि लक्ष्य पर वापस लौटते समय वीआर रोबोट को कहां ड्राइविंग रोकनी चाहिए। इस पाठ में पहले <Eye Sensor near object> ब्लॉक का उपयोग करते समय, लक्ष्य से प्रत्येक डिस्क तक की दूरी जानने की आवश्यकता नहीं है।

वी.आर. रोबोट दूरी सेंसर से प्राप्त डेटा का उपयोग करके नीले लक्ष्य की ओर वापस आएगा और यह निर्धारित करेगा कि उसे कहां रुकना है। एक बार जब वीआर रोबोट नीले गोल के अंदर रुक जाएगा, तो वीआर रोबोट नीली डिस्क को गिरा देगा।
- Unit8Lesson3 परियोजना में काम करना जारी रखें।
- डिस्टेंस सेंसर वीआर रोबोट के सामने से निकटतम वस्तु तक की दूरी मापता है। इस कारण से, वीआर रोबोट को नीले गोल की ओर वापस जाने से पहले 180 डिग्री घूमना होगा।
- वी.आर. रोबोट खेल के मैदान की पिछली दीवार पर लगे डिस्टेंस सेंसर का उपयोग करके यह निर्धारित करेगा कि डिस्क को कहां गिराया जाए। इस कारण से, वीआर रोबोट को नीले गोल की ओर वापस जाने से पहले 180 डिग्री घूमना होगा।
-
[शीर्षक की ओर मुड़ें] ब्लॉक का उपयोग यह सुनिश्चित करने के लिए किया जा सकता है कि वीआर रोबोट सही शीर्षक की ओर मुड़ जाए।
स्विच ब्लॉक का उपयोग करना
यह स्विच [शीर्षक पर जाएँ] ब्लॉक है। आप कोष्ठकों में संख्यात्मक मान बदलकर मोड़ की डिग्री को संशोधित कर सकते हैं। याद रखें कि संख्या को माप की इकाई (डिग्री) से पहले अल्पविराम से अलग करके लिखा जाना चाहिए।
आपकी जानकारी के लिए
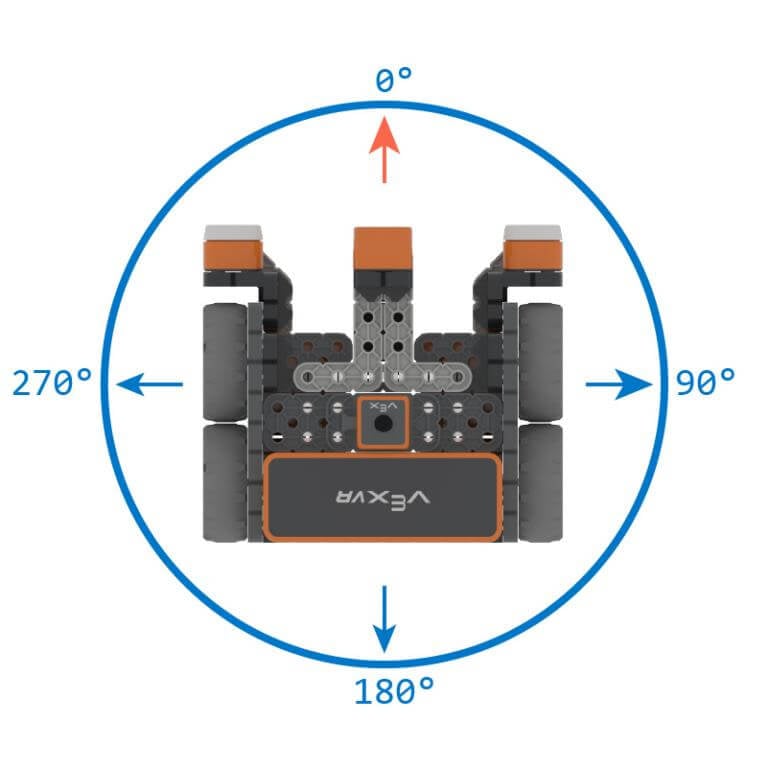
[शीर्षक की ओर मुड़ें] ब्लॉक गायरो सेंसर का उपयोग करके वीआर रोबोट को एक विशिष्ट शीर्षक की ओर मोड़ देता है। वीआर रोबोट किस दिशा में घूमेगा (बाएं या दाएं) यह गायरो सेंसर की वर्तमान दिशा के आधार पर निर्धारित होता है। [शीर्षक की ओर मुड़ें] ब्लॉक का उपयोग वीआर रोबोट की स्थिति की परवाह किए बिना उसे एक विशिष्ट शीर्षक की ओर निर्देशित करने के लिए किया जाता है। जैसे ही आप डिस्क उठाते या गिराते हैं, वीआर रोबोट रास्ते से भटक सकता है। [शीर्षक की ओर मुड़ें] ब्लॉक का उपयोग करने से यह सुनिश्चित होता है कि वीआर रोबोट पूर्ववर्ती शीर्षक के सापेक्ष स्थिति के बजाय पूर्ण स्थिति की ओर मुड़ेगा।
-
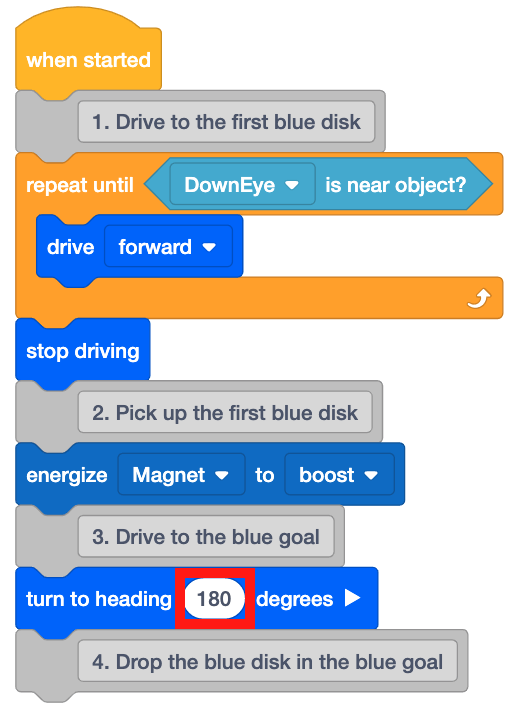
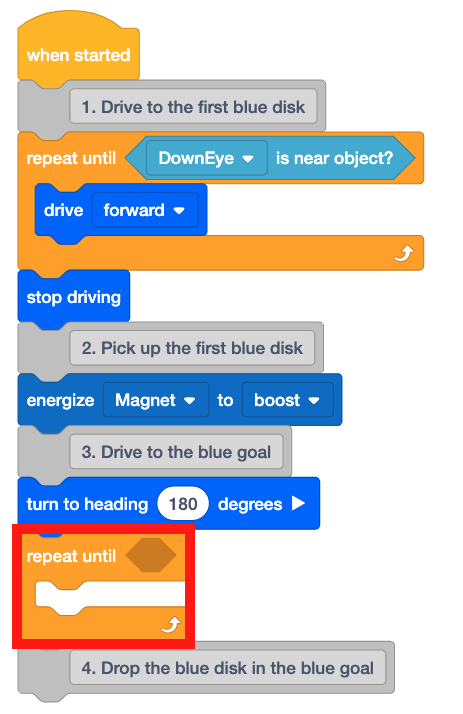
तीसरी टिप्पणी के नीचे [शीर्षक पर जाएँ] ब्लॉक जोड़ें।

-
[शीर्षक की ओर मुड़ें] ब्लॉक को 180 डिग्री पर सेट करें।
-
अब जबकि वीआर रोबोट प्रारंभिक स्थिति की ओर उन्मुख हो गया है, वीआर रोबोट को नीले गोल की ओर वापस जाना होगा। [Turn to heading] ब्लॉक के नीचे [Repeat until] ब्लॉक जोड़ें।
-
नीले लक्ष्य की ओर वापस जाने के लिए, वीआर रोबोट दूरी सेंसर से प्राप्त डेटा का उपयोग करके यह निर्धारित करेगा कि वीआर रोबोट नीले लक्ष्य के अंदर कब है। जैसा कि पिछले पाठ में चर्चा की गई थी, डिस्क मूवर प्लेग्राउंड पर प्रत्येक ग्रिड वर्ग का माप 200 मिलीमीटर (मिमी) x 200 मिलीमीटर (मिमी) है।

-
इन मापों का उपयोग करके, नीले गोल का केंद्र खेल के मैदान की दीवार से लगभग 200 मिलीमीटर (मिमी) की दूरी पर निर्धारित किया जा सकता है।

-
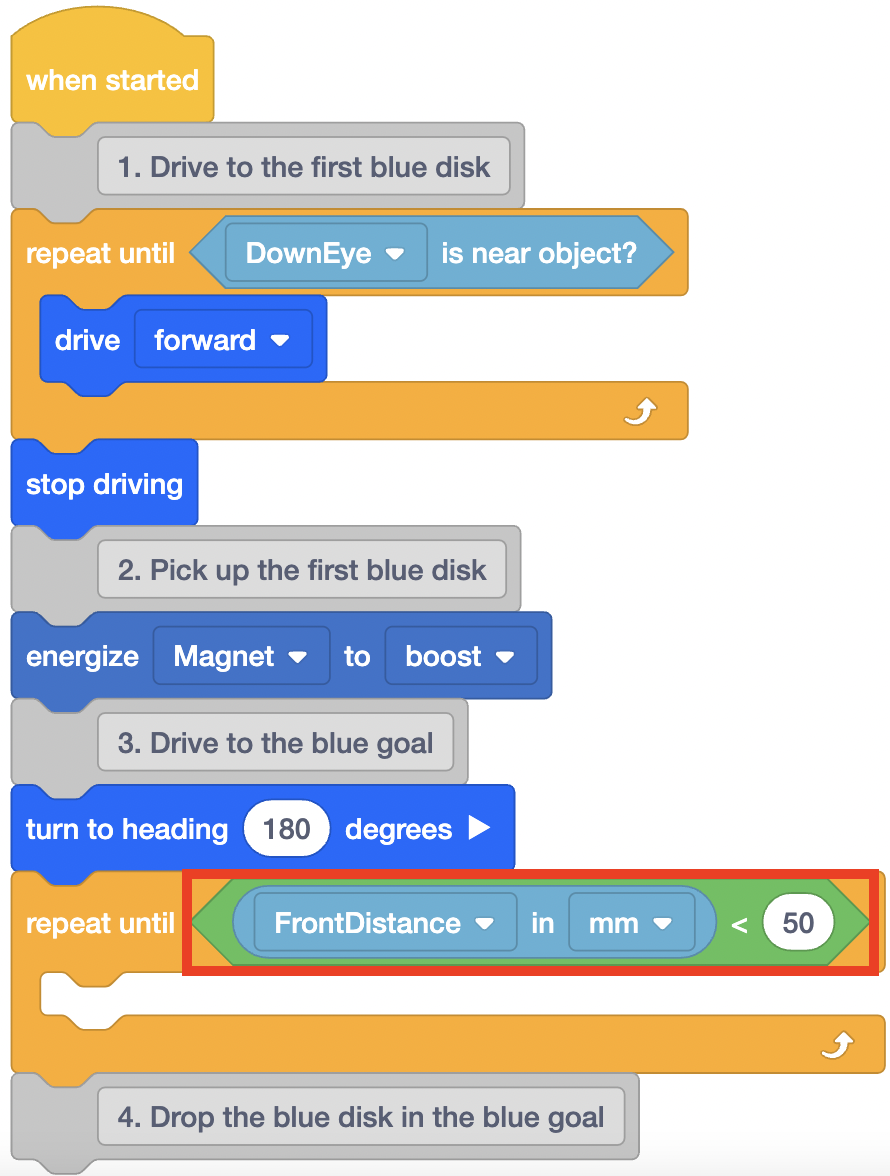
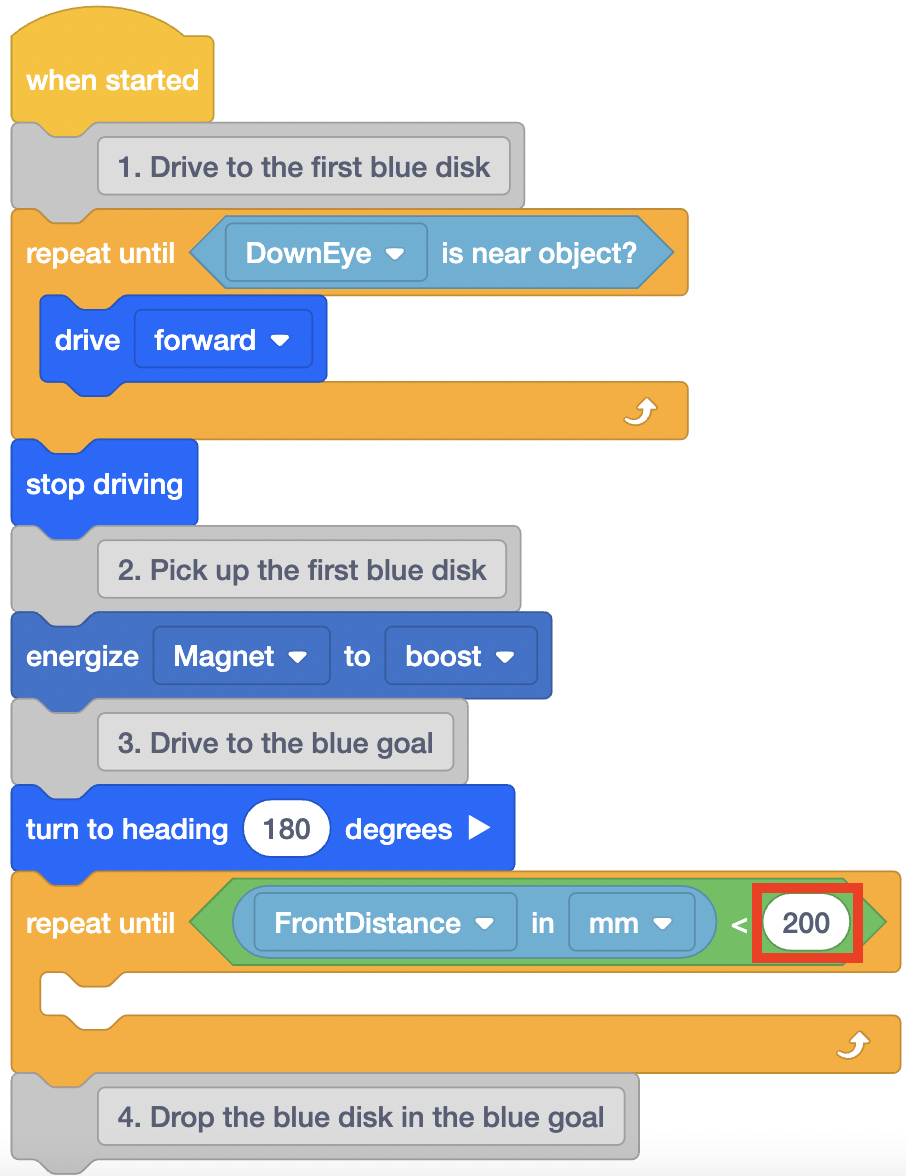
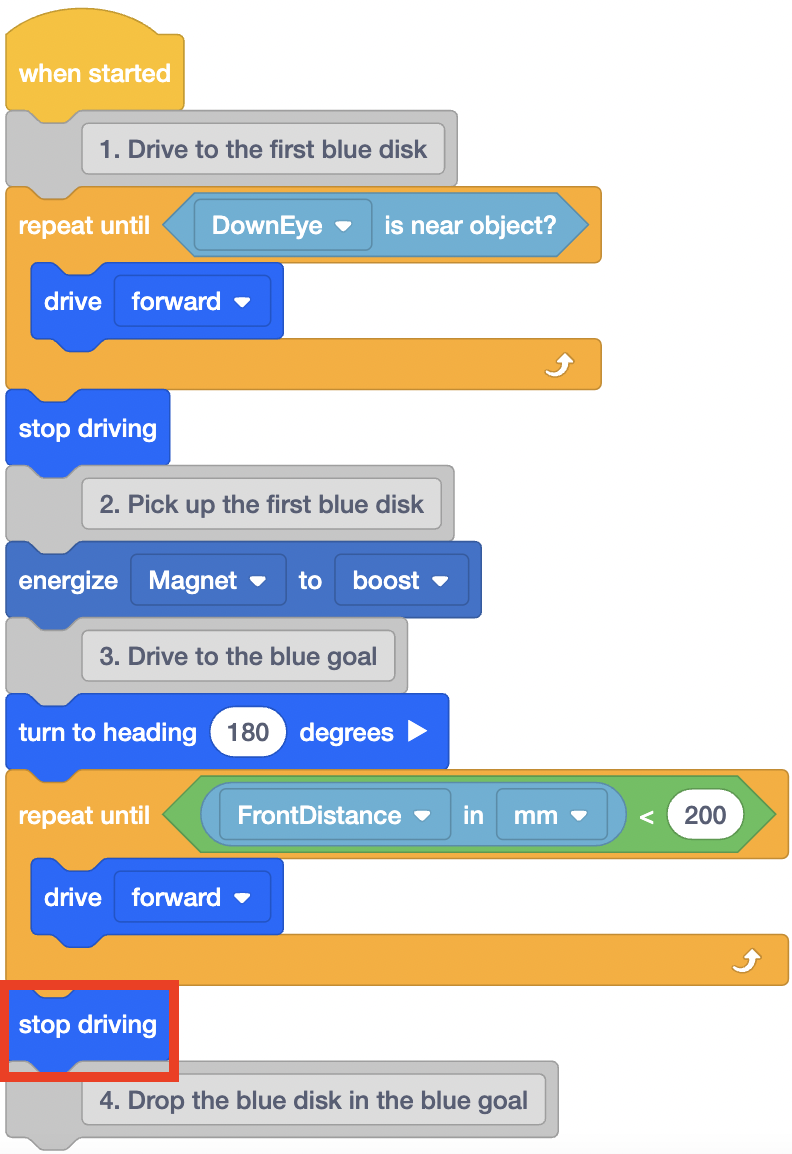
जब दूरी सेंसर यह रिपोर्ट दे कि वीआर रोबोट खेल के मैदान की दीवार से 200 मिलीमीटर (मिमी) से कम दूरी पर है, तो वीआर रोबोट को ड्राइविंग बंद कर देनी चाहिए। निम्नलिखित ब्लॉकों को [Repeat until] ब्लॉक में जोड़ें।
-
<Less than> ब्लॉक में पैरामीटर को 200 में बदलें।
-
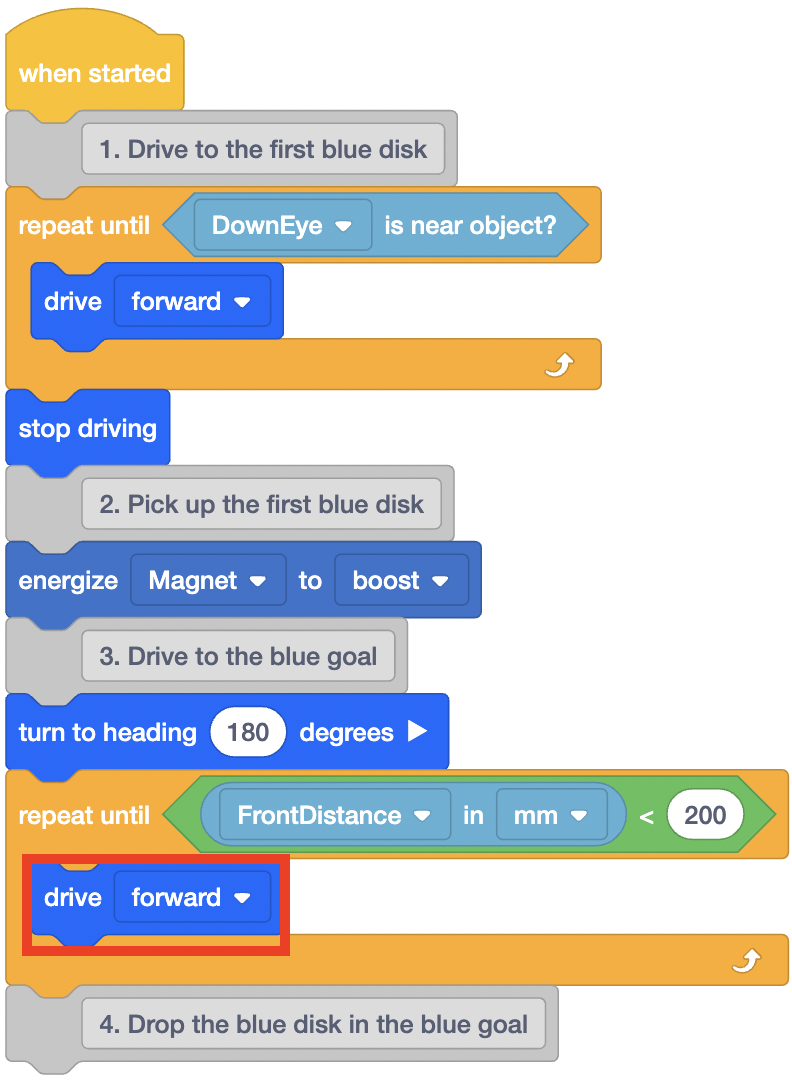
इस [Repeat until] ब्लॉक में एक [Drive] ब्लॉक जोड़ें. यह वीआर रोबोट को तब तक आगे बढ़ने का निर्देश देगा जब तक कि दूरी सेंसर 200 मिलीमीटर (मिमी) से कम की दूरी की रिपोर्ट न कर दे।
-
एक बार जब वीआर रोबोट नीले लक्ष्य (दीवार से 200 मिमी) तक पहुंच जाएगा, तो वीआर रोबोट को ड्राइविंग बंद करनी होगी। [Repeat until] ब्लॉक के नीचे [Stop driving] ब्लॉक जोड़ें।
-
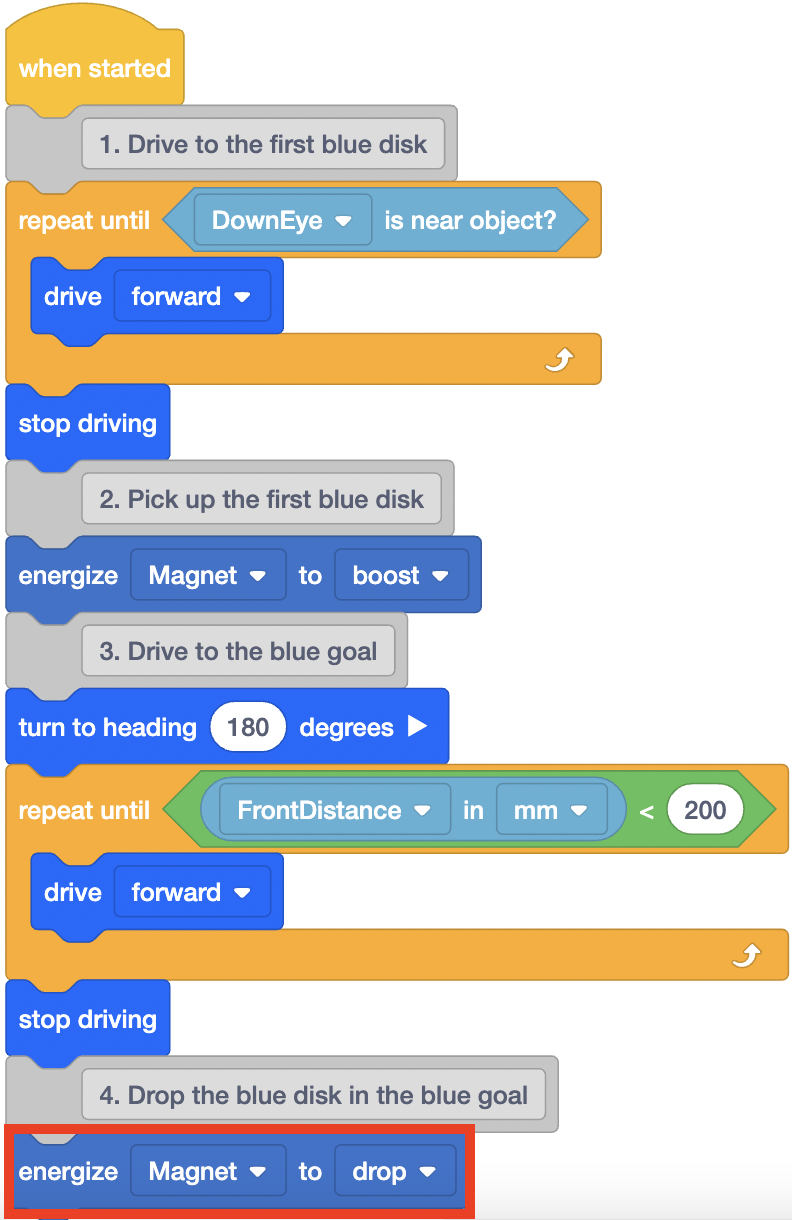
अब चूंकि वीआर रोबोट नीले गोल में रुक गया है, वह डिस्क को गिरा सकता है। चौथी टिप्पणी के नीचे [Energize Electromagnet] ब्लॉक जोड़ें और ब्लॉक को 'ड्रॉप' पर सेट करें।
-
वीआर रोबोट को किसी डिस्क से टकराने या गिरने से बचने के लिए थोड़ी दूरी तक रिवर्स में चलना होगा। डिस्क से टकराने पर वीआर रोबोट संभवतः अपने मार्ग से भटक सकता है। वीआर रोबोट को 100 मिलीमीटर (मिमी) तक रिवर्स में चलाने और 0 डिग्री की दिशा में वापस मुड़ने का निर्देश देने के लिए निम्नलिखित ब्लॉक जोड़ें।

- यदि डिस्क मूवर प्लेग्राउंड पहले खुला नहीं है तो उसे खोलें और प्रोजेक्ट चलाएं।
-
वी.आर. रोबोट आगे बढ़ता है, पहली डिस्क उठाता है, फिर नीले गोल की ओर 180 डिग्री घूम जाता है। इसके बाद वीआर रोबोट दूरी सेंसर से प्राप्त मानों का उपयोग करके यह निर्धारित करता है कि कब ड्राइविंग रोकनी है और नीली डिस्क को कब गिराना है।

- ध्यान दें कि दूसरा [Repeat until] ब्लॉक परियोजना के इस भाग में कैसे कार्य करता है।
- जब वीआर रोबोट पर दूरी सेंसर यह पता लगाता है कि खेल के मैदान की दीवार 200 मिलीमीटर (मिमी) से कम दूरी पर है, तो परियोजना [दोहराएँ जब तक] ब्लॉक के नीचे स्टैक में अगले ब्लॉक पर चली जाएगी।
- इस परियोजना में, इसका मतलब था कि वीआर रोबोट गाड़ी चलाना बंद कर देता है और इलेक्ट्रोमैग्नेट को नीले गोल में गिरा देता है।
इस पाठ के शेष भाग को जारी रखने के लिए अगला बटन का चयन करें।