
Pelajaran 3: Menggunakan Umpan Balik Sensor yang Dilaporkan untuk Mengambil Disk
Pelajaran ini akan menggunakan umpan balik sensor yang dilaporkan untuk memecahkan tantangan yang sama seperti Pelajaran 2. Robot VR akan mengambil dan menggerakkan cakram biru pertama ke gawang biru.
-
Mulai proyek baru di VEXcode VR dan beri nama proyek Unit8Lesson3.

-
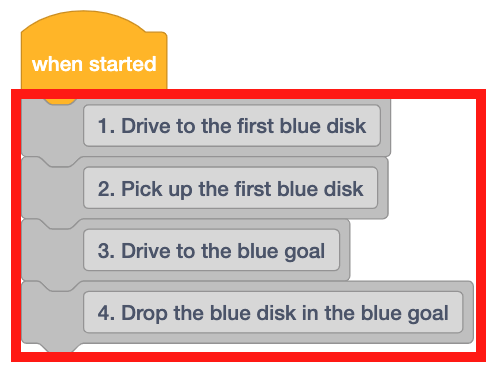
Seret empat blok Komentar ke ruang kerja. Tambahkan komentar untuk setiap langkah yang diperlukan Robot VR untuk melaju ke cakram pertama, mengambilnya, dan mengembalikannya ke sasaran biru.
-
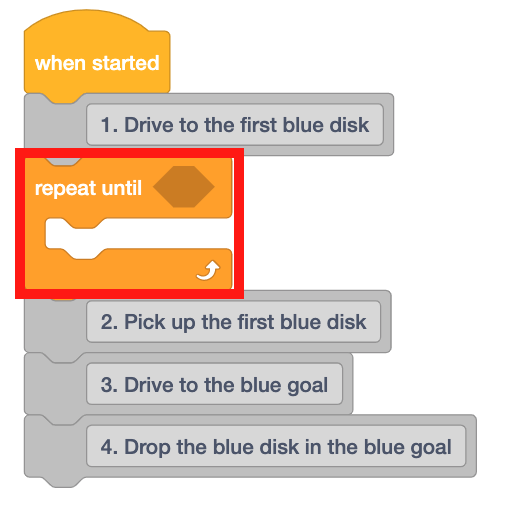
Seret blok [Ulangi hingga] ke ruang kerja di bawah komentar pertama.
Untuk Informasi Anda
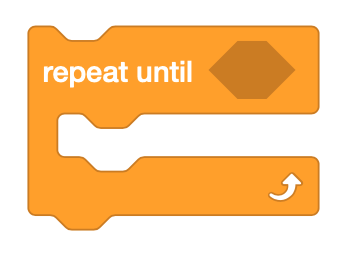
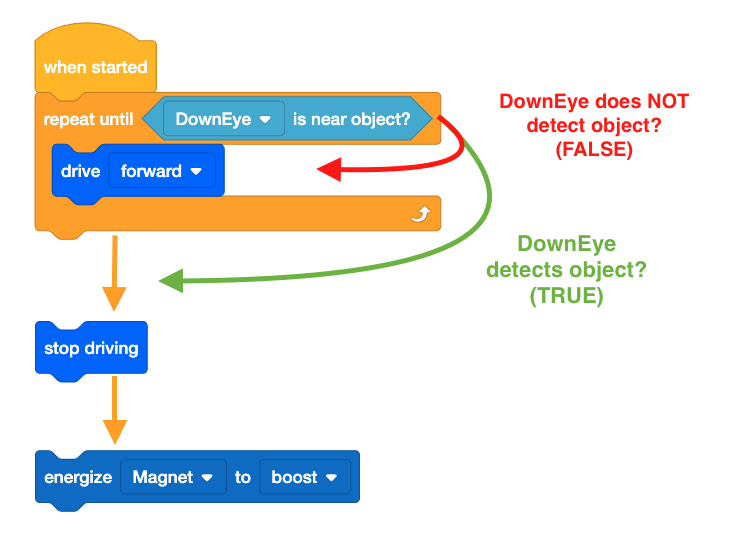
Blok [Ulangi hingga] adalah blok C yang menerima blok reporter Boolean. Blok [Ulangi hingga] hanya akan memeriksa kondisi Boolean di awal setiap perulangan. Jika kondisi Boolean dilaporkan sebagai FALSE, blok di dalamnya akan berjalan. Jika kondisi Boolean dilaporkan sebagai TRUE, blok di dalamnya akan dilewati.
-
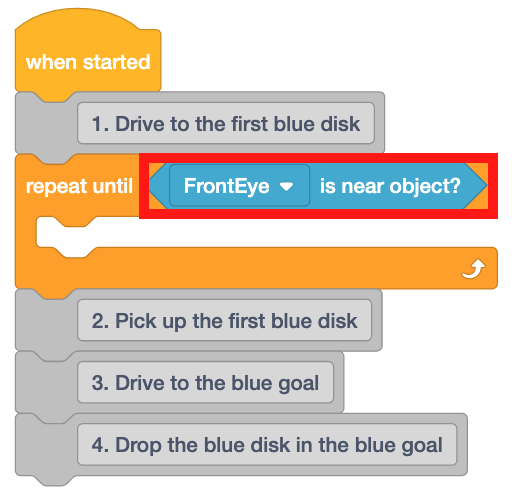
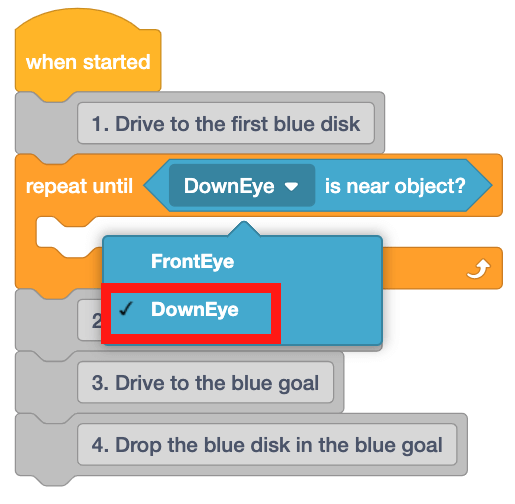
Blok <Eye Sensor near object> melaporkan BENAR ketika Robot VR mendeteksi cakram berwarna di Disk Mover Playground. Seret blok ini ke dalam proyek.
-
Cakram pada Disk Mover Playground berada di lantai Playground dan tidak dapat dideteksi oleh Front Eye Sensor. Karena alasan ini, atur blok <Eye Sensor near object> ke 'DownEye.'
-
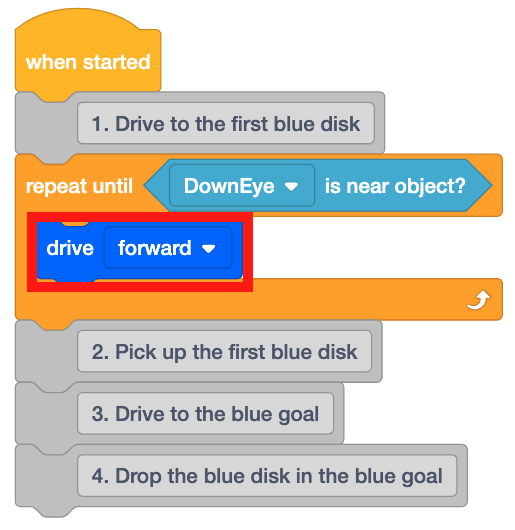
Blok di bagian dalam blok [Ulangi hingga] akan berjalan saat Robot VR TIDAK mendeteksi suatu objek. Untuk mencapai salah satu cakram, Robot VR perlu bergerak maju hingga cakram terdeteksi.

-
Seret blok [Drive] ke blok [Repeat until].
-
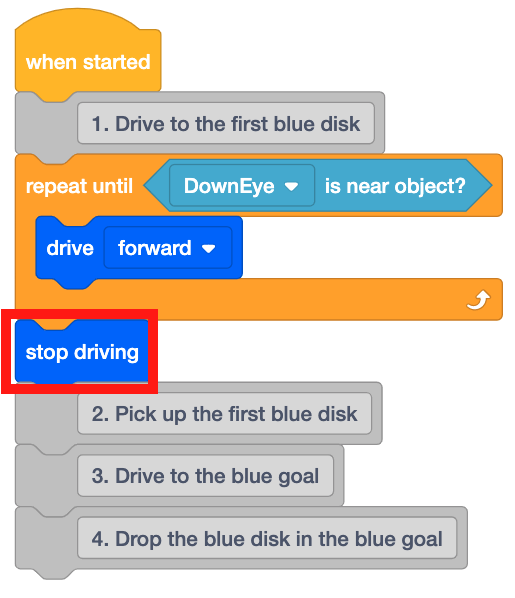
Saat disk terdeteksi, Robot VR perlu berhenti melaju untuk mengambilnya. Seret blok [Berhenti mengemudi] dan letakkan di bawah blok [Ulangi hingga].
-
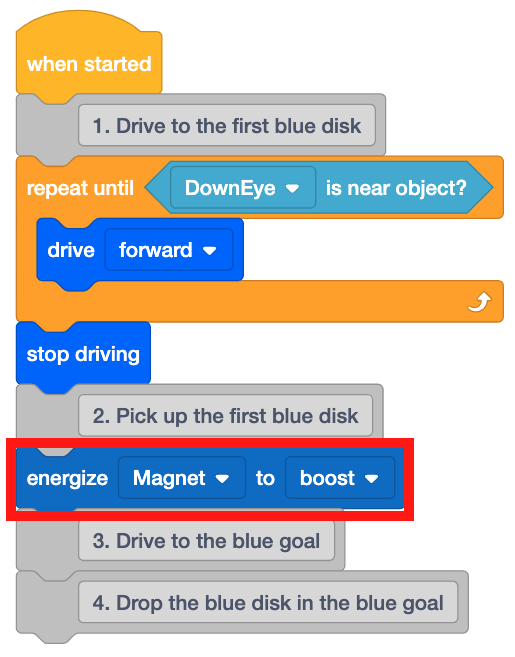
Sekarang, instruksikan Robot VR untuk mengambil cakram berisi Elektromagnet dengan menempatkan blok [Energize Electromagnet] di bawah komentar kedua.
- Buka Disk Mover Playground jika belum terbuka dan jalankan proyeknya.
-
Robot VR melaju maju hingga cakram biru pertama terdeteksi oleh Sensor Mata Bawah, berhenti melaju, dan memberi energi pada Elektromagnet untuk mengambil cakram tersebut.

- Perhatikan bagaimana blok [Ulangi hingga] bekerja dalam proyek ini.
- Setelah Sensor Mata Bawah pada Robot VR mendeteksi suatu objek, proyek berpindah ke blok berikutnya dalam tumpukan di bawah blok [Ulangi hingga].
- Dalam proyek ini, artinya Robot VR berhenti melaju dan memberi energi pada Elektromagnet.
Menggunakan Blok Switch
Gambar di bawah menampilkan grafik alur kerja Pelajaran ini menggunakan blok Switch. Membandingkan grafik ini dengan grafik di atas dapat membantu Anda lebih memahami alur kerja perintah Switch Python baru yang sedang Anda pelajari.
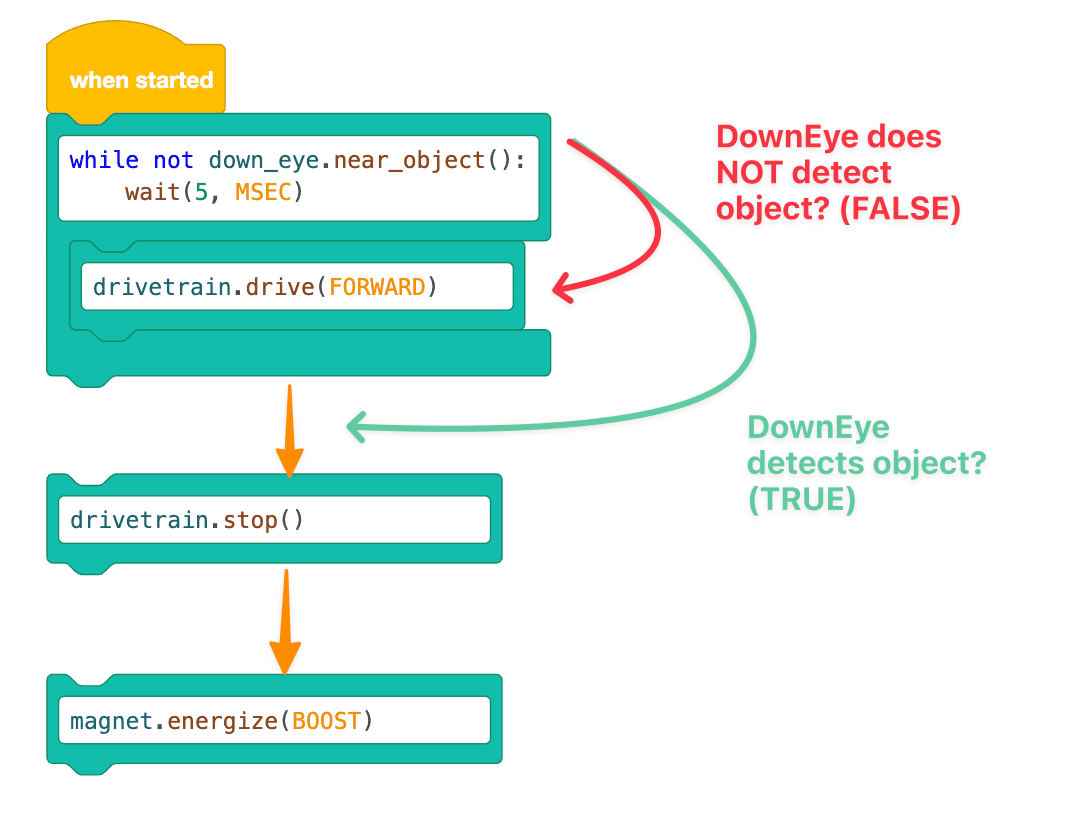
Pilih tombol Berikutnya untuk melanjutkan sisa Pelajaran ini.