
Pelajaran 3: Menggunakan Umpan Balik Sensor yang Dilaporkan untuk Menempatkan Cakram di Gawang
Pada Pelajaran 2, Robot VR melaju mundur kembali ke titik awal untuk meletakkan cakram. Hal ini mengharuskan pengguna untuk menghitung jarak pasti yang harus ditempuh Robot VR. Hal ini mungkin tidak selalu memungkinkan. Sebaliknya, Robot VR dapat menggunakan nilai sensor yang dilaporkan untuk mengambil dan menjatuhkan disk dengan presisi yang konsisten.
Pelajaran 3 menggunakan umpan balik sensor yang dilaporkan untuk menentukan di mana Robot VR harus berhenti melaju saat kembali ke tujuan. Dalam penggunaan blok <Eye Sensor near object> sebelumnya dalam pelajaran ini, tidak perlu mengetahui jarak dari tujuan ke setiap cakram.

Robot VR akan melaju kembali menuju sasaran biru menggunakan data dari Sensor Jarak untuk menentukan di mana harus berhenti melaju. Setelah Robot VR berhenti di dalam gawang biru, Robot VR akan menjatuhkan cakram biru.
- Teruskan mengerjakan proyek Unit8Pelajaran3.
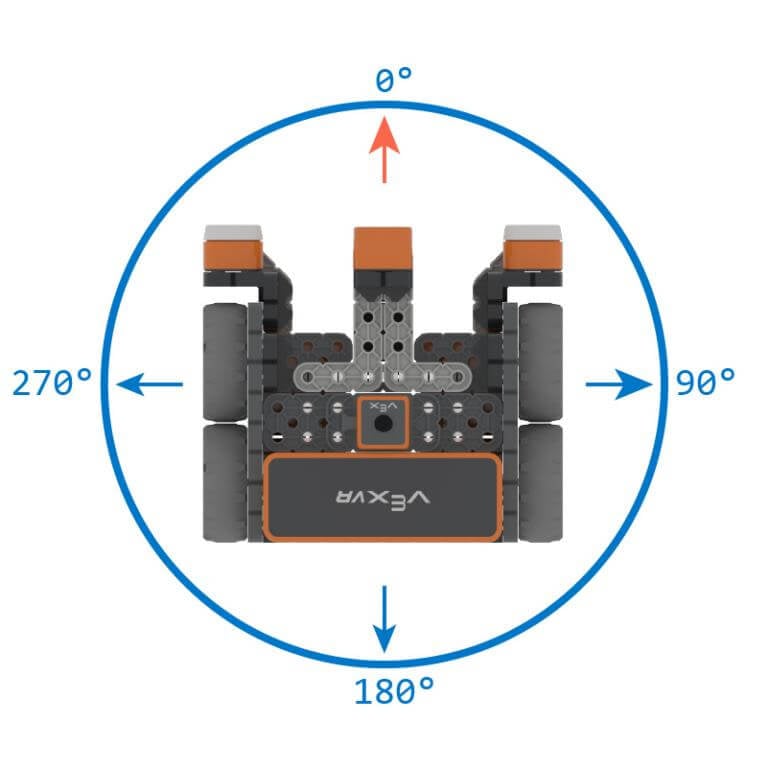
- Sensor Jarak mengukur jarak dari depan Robot VR ke objek terdekat. Karena alasan ini, Robot VR perlu berputar 180 derajat sebelum melaju kembali menuju sasaran biru.
- Robot VR akan menggunakan Sensor Jarak dengan dinding belakang Taman Bermain untuk menentukan di mana akan menjatuhkan cakram. Karena alasan ini, Robot VR perlu berputar 180 derajat sebelum melaju kembali menuju sasaran biru.
-
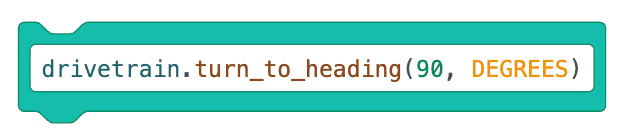
Blok [Beralih ke arah] dapat digunakan untuk memastikan Robot VR berbelok ke arah yang benar.
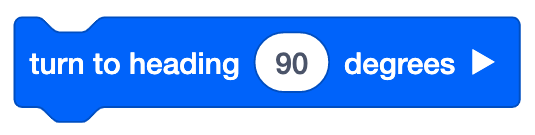
Menggunakan Blok Switch
Ini adalah blok Switch [beralih ke judul]. Anda dapat mengubah derajat putaran dengan mengubah nilai numerik dalam tanda kurung. Ingat bahwa angka harus ditulis sebelum satuan pengukuran (DERAJAT), dipisahkan dengan koma.
Untuk Informasi Anda
Blok [Putar ke arah tujuan] mengubah Robot VR ke arah tujuan tertentu menggunakan Sensor Gyro. Arah Robot VR akan berputar (kiri atau kanan) ditentukan berdasarkan arah sensor Gyro saat ini. Blok [Putar ke arah] digunakan untuk mengarahkan Robot VR ke arah tertentu tanpa mempedulikan posisi Robot VR. Saat Anda mengambil atau menjatuhkan cakram, Robot VR mungkin akan terlempar dari jalurnya. Menggunakan blok [Putar ke arah arah] memastikan bahwa Robot VR akan berputar ke posisi absolut, bukan posisi relatif terhadap arah arah sebelumnya.
-
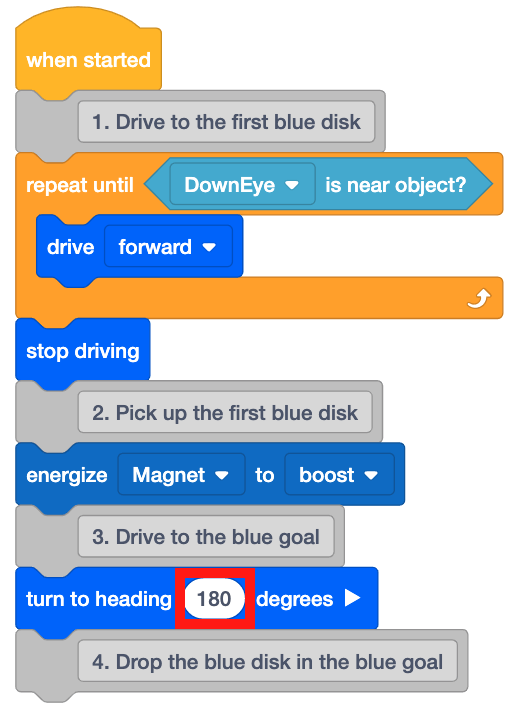
Tambahkan blok [Beralih ke judul] di bawah komentar ketiga.

-
Atur blok [Putar ke arah] ke 180 derajat.
-
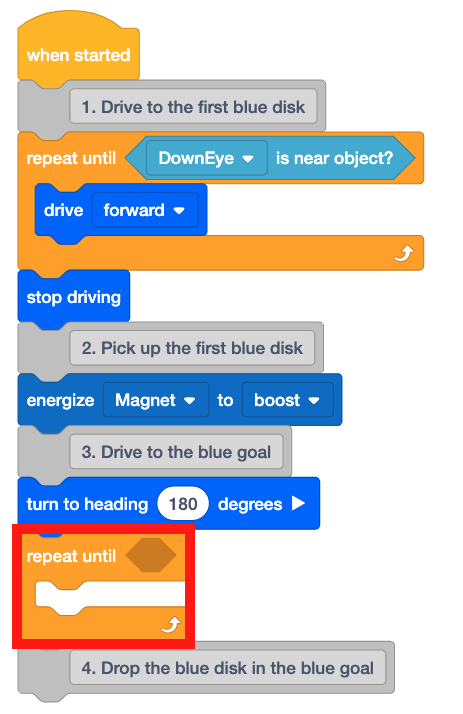
Sekarang setelah Robot VR berorientasi ke posisi awal, Robot VR perlu melaju kembali ke sasaran biru. Tambahkan blok [Ulangi hingga] di bawah blok [Beralih ke judul].
-
Untuk kembali ke gawang biru, Robot VR akan menggunakan data dari Sensor Jarak untuk menentukan kapan Robot VR berada di dalam gawang biru. Seperti yang dibahas dalam pelajaran sebelumnya, setiap kotak kisi pada Disk Mover Playground berukuran 200 milimeter (mm) kali 200 milimeter (mm).

-
Dengan menggunakan pengukuran tersebut, pusat gawang biru dapat ditentukan berjarak sekitar 200 milimeter (mm) dari dinding Taman Bermain.

-
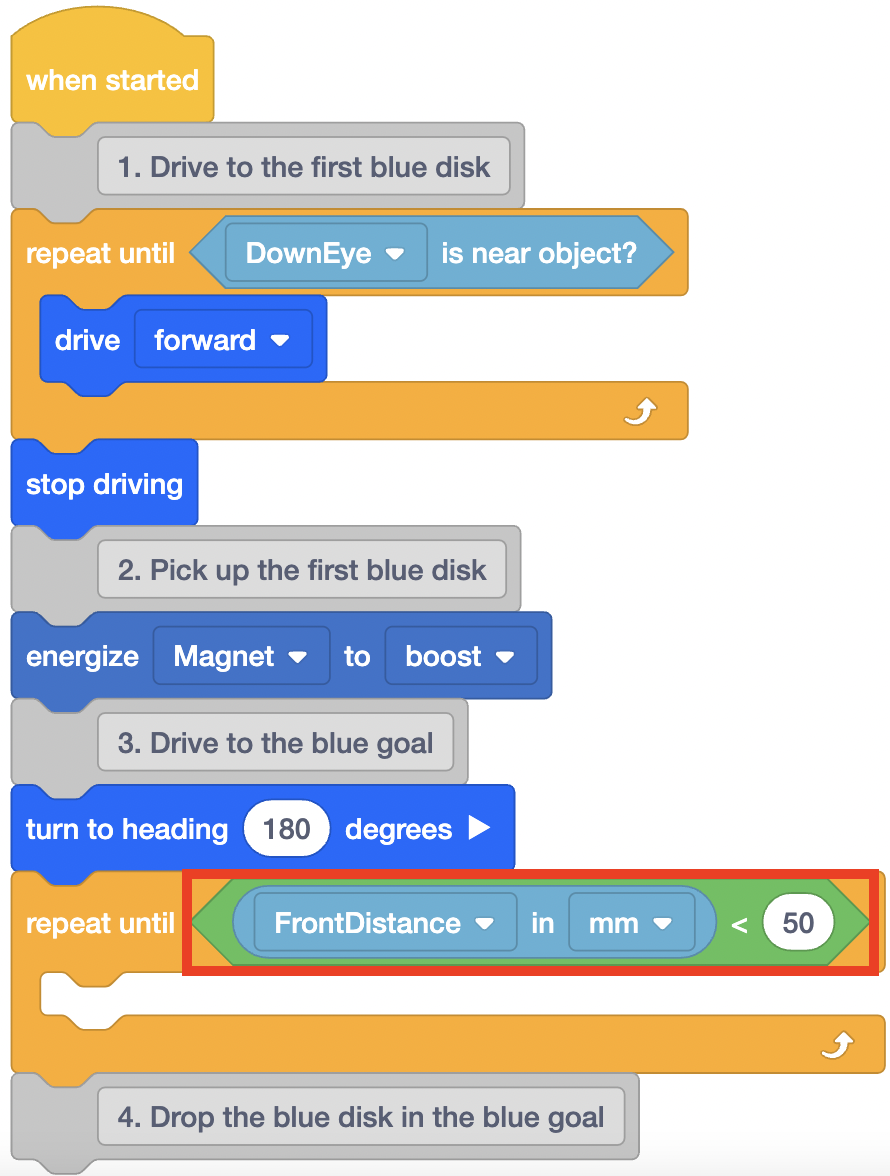
Robot VR harus berhenti melaju ketika Sensor Jarak melaporkan bahwa Robot VR berada kurang dari 200 milimeter (mm) dari dinding Taman Bermain. Tambahkan blok berikut ke blok [Ulangi hingga].
-
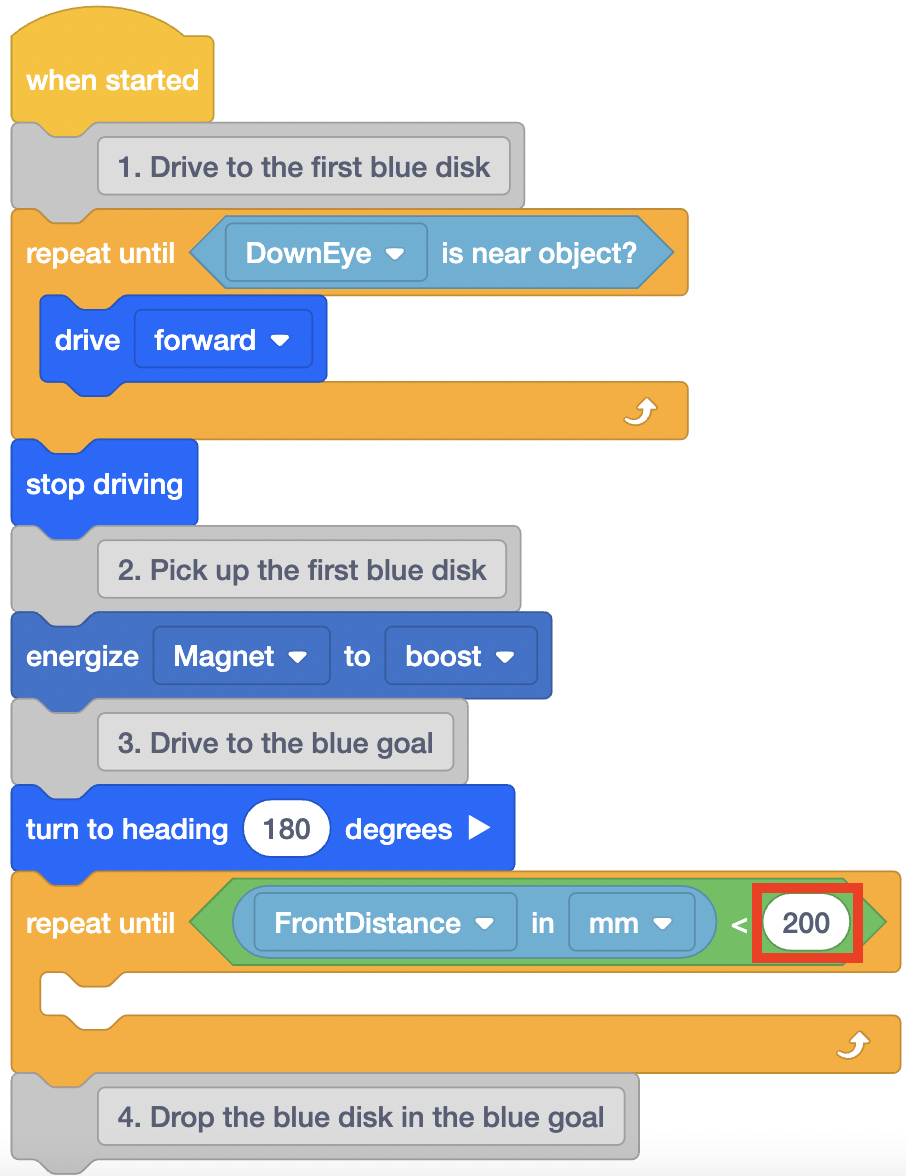
Ubah parameter di blok <Less than> menjadi 200.
-
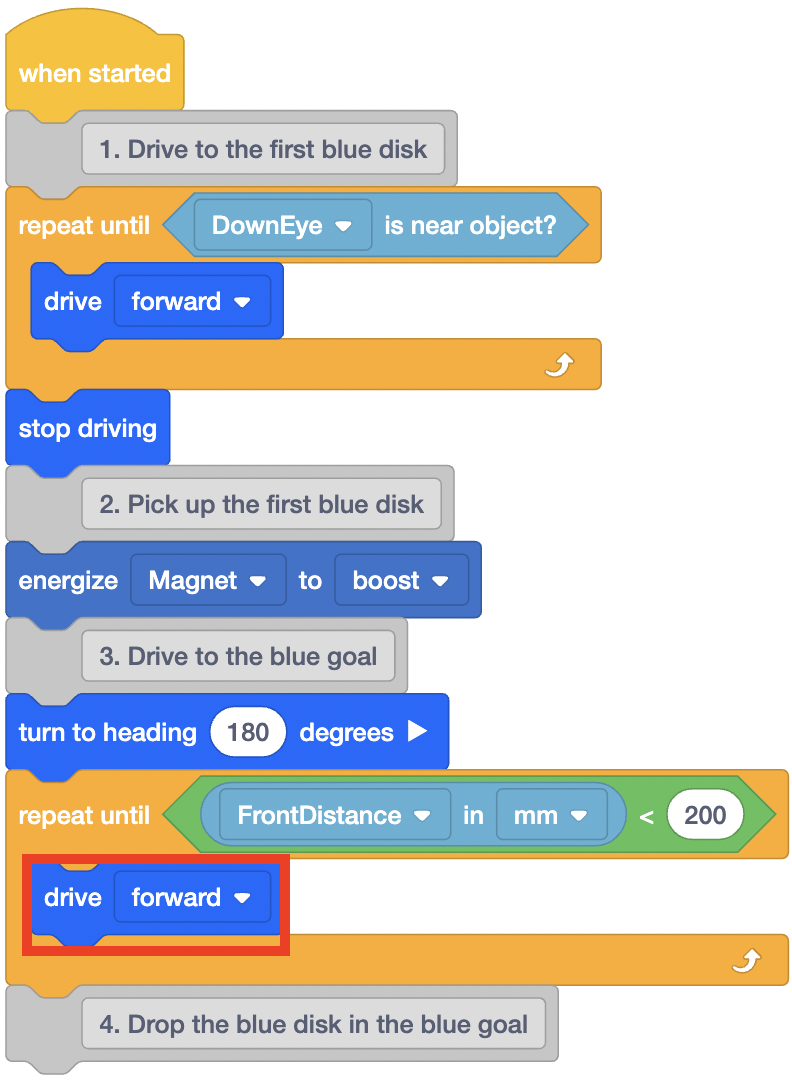
Tambahkan blok [Drive] ke blok [Repeat until] ini. Ini akan menginstruksikan Robot VR untuk melaju maju hingga Sensor Jarak melaporkan jarak kurang dari 200 milimeter (mm).
-
Setelah Robot VR mencapai sasaran biru (200 mm dari dinding), Robot VR harus berhenti melaju. Tambahkan blok [Berhenti mengemudi] di bawah blok [Ulangi hingga].
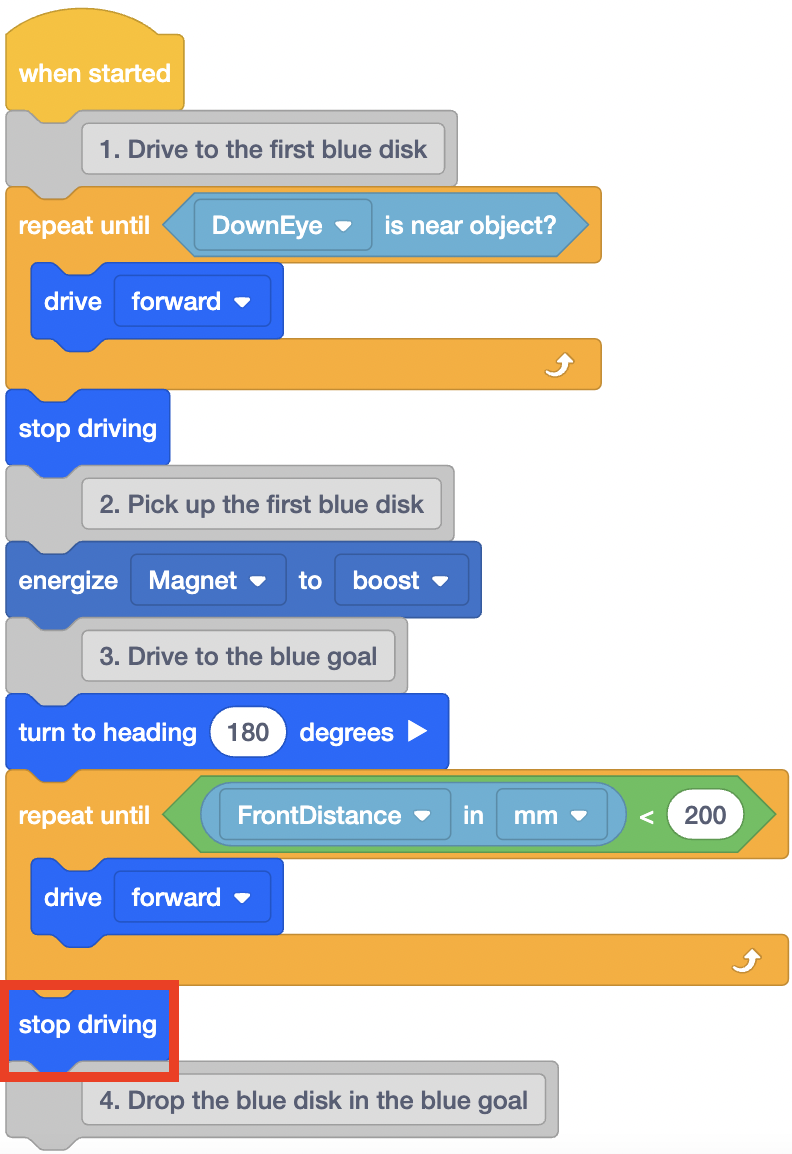
-
Sekarang Robot VR telah berhenti di sasaran biru, ia dapat menjatuhkan cakramnya. Tambahkan blok [Energize Electromagnet] di bawah komentar keempat dan atur blok ke 'jatuhkan.'
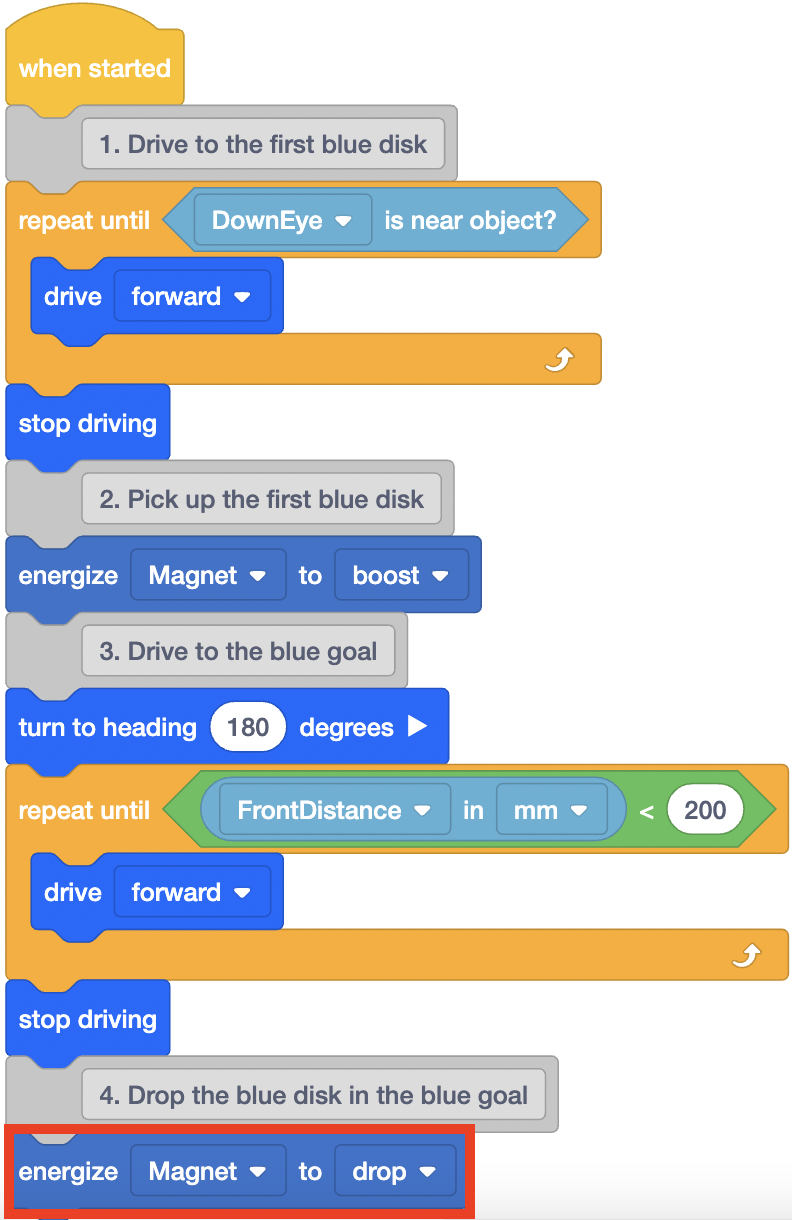
-
Robot VR perlu bergerak mundur dalam jarak pendek untuk menghindari terguling atau bertabrakan dengan cakram apa pun. Bertabrakan dengan cakram berpotensi membuat Robot VR keluar jalur. Tambahkan blok berikut untuk menginstruksikan Robot VR untuk bergerak mundur sejauh 100 milimeter (mm) dan berputar kembali ke arah 0 derajat.

- Buka Disk Mover Playground jika belum terbuka dan jalankan proyeknya.
-
Robot VR melaju ke depan, mengambil cakram pertama, lalu berputar ke arah 180 derajat untuk menghadap sasaran biru. Robot VR kemudian menggunakan nilai dari Sensor Jarak untuk menentukan kapan harus berhenti mengemudi dan menjatuhkan cakram biru.

- Perhatikan bagaimana blok [Ulangi hingga] kedua berfungsi di bagian proyek ini.
- Ketika Sensor Jarak pada Robot VR mendeteksi dinding Taman Bermain berjarak kurang dari 200 milimeter (mm), proyek akan berpindah ke blok berikutnya dalam tumpukan di bawah blok [Ulangi hingga].
- Dalam proyek ini, artinya Robot VR berhenti melaju dan menjatuhkan Elektromagnet di gawang biru.
Pilih tombol Berikutnya untuk melanjutkan sisa Pelajaran ini.