
Introduzione
In questa lezione imparerai a conoscere il sensore ottico e come può essere utilizzato con i blocchi [If then] e [Repeat] in un progetto per far sì che il tuo Clawbot raccolga una Buckyball in base al suo colore. Quindi applicherai ciò che hai imparato per competere nella Treasure Mover Challenge, in cui il tuo robot dovrà raccogliere solo la Treasure Buckyball rossa. Guarda l'animazione qui sotto per vedere un esempio di come un robot potrebbe muoversi autonomamente durante una corsa di successo nella Treasure Mover Challenge.
Aggiungi un sensore ottico
In questa lezione, imparerai a conoscere il feedback del sensore e come puoi codificare il tuo robot utilizzando quel feedback.
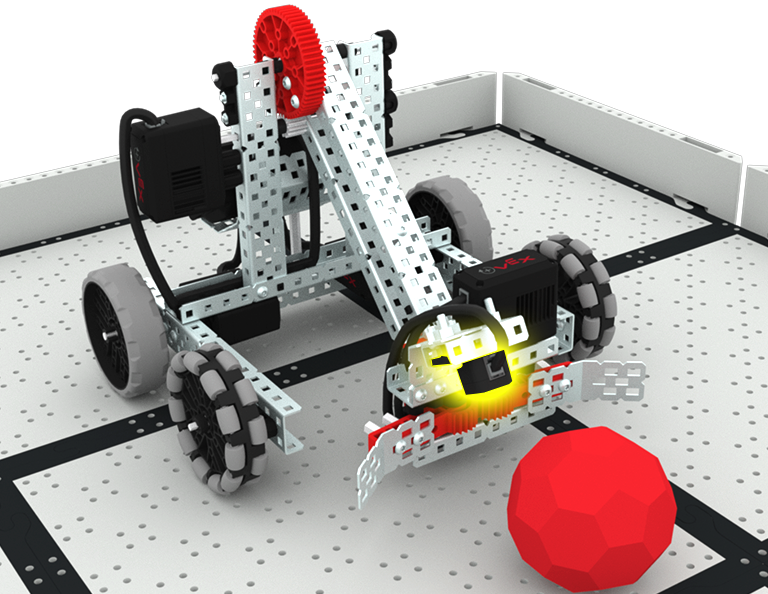
Aggiungi un sensore ottico al tuo Clawbot come mostrato in questa immagine.
- Collegare un canale C 1x2x1x4 a un sensore ottico.
- Montare il canale a C su un soffietto angolato, quindi fissarlo all'artiglio.
Seleziona Avanti > per conoscere il sensore ottico e i blocchi che puoi utilizzare per costruire un progetto per raccogliere una Buckyball rossa.