
Cos'è un sensore di visione?
![]() Teacher Toolbox
-
Lo scopo di questa pagina
Teacher Toolbox
-
Lo scopo di questa pagina
Questa pagina introdurrà gli studenti a ciò che è un sensore di visione e ad alcune delle sue capacità. Gli studenti analizzeranno quindi un'immagine parziale di un progetto di esempio per visualizzare come il sensore di visione può essere utilizzato con VEXcode IQ.
Le domande Motivate Discussion in fondo alla pagina possono essere completate come discussione in classe o individualmente nei quaderni di ingegneria degli studenti.
Descrizione
Il sensore di visione consente al robot di raccogliere dati visivi da un feed in tempo reale. Un feed live è una trasmissione in streaming di ciò che una videocamera sta catturando. Il sensore di visione è come una telecamera intelligente in grado di osservare, selezionare, regolare e memorizzare i colori e gli oggetti che appaiono nel suo campo visivo.
 Sensore di
Sensore di Capacità:
- Questo sensore può essere utilizzato per riconoscere colori e motivi di colore.
- Questo sensore può essere utilizzato per seguire un oggetto.
- Questo sensore può essere utilizzato per raccogliere informazioni sull'ambiente.
Il sensore di visione consente al robot di utilizzare i dati di input visivi dal suo
ambiente. Il progetto può quindi determinare in che modo i dati di input visivi dovrebbero
influenzare il comportamento del robot. Ad esempio, il robot potrebbe eseguire azioni
(output) come la rotazione dei motori o la visualizzazione dei risultati sullo schermo
LCD.
Il sensore di visione può anche catturare un'istantanea di ciò che si trova di
fronte ad esso e analizzarlo in base a ciò che l'utente chiede. Ad esempio, un utente può
raccogliere dati dall'istantanea come, di che colore è l'oggetto? È stato rilevato un
oggetto? Quanto è grande l'oggetto (larghezza e altezza)?
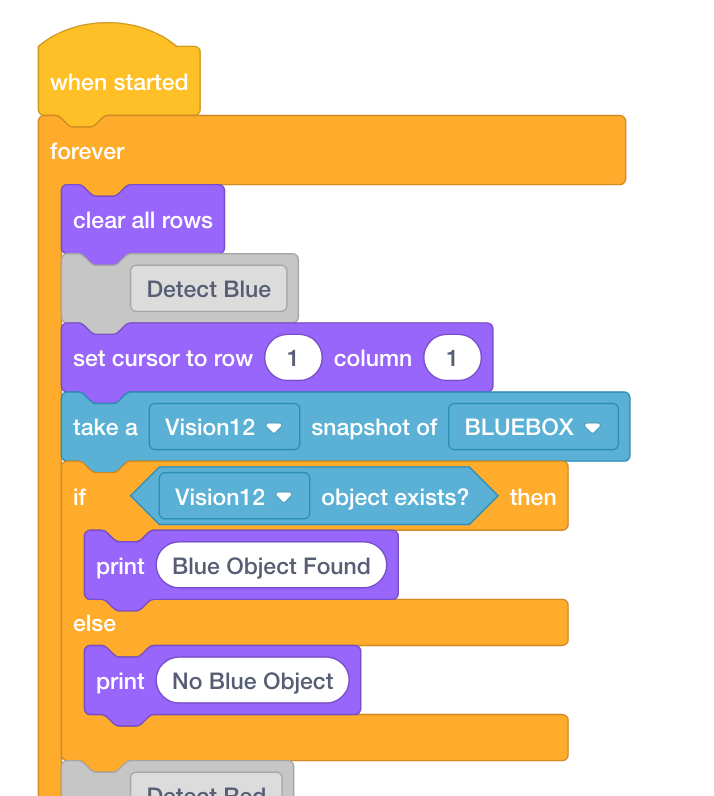
Il robot può quindi
prendere decisioni basate su questi dati. Il progetto di esempio parziale riportato di
seguito mostra come farlo. In questa prima parte del progetto di esempio, il robot stamperà
"Blue Object Found" se viene rilevato un oggetto blu e "No Blue Object" in caso contrario.
Questa è la prima delle tre decisioni all'interno del progetto di esempio, ma la seconda e
la terza decisione non sono mostrate qui.
![]() Motiva la discussione
Motiva la discussione
D: Quali tipi di lavori umani trarrebbero beneficio dall'avere
l'aiuto di un robot con un sensore di visione?
A: Ascolta i lavori umani che trarrebbero beneficio dalla capacità
di vedere negli ambienti e/o manipolare l'ambiente circostante da distanze remote (ad
esempio, osservare gli animali in natura, disarmare gli esplosivi o eseguire interventi
chirurgici assistiti da robot).
D: Nomina un dispositivo e descrivi come utilizza input, output e
processo.
A: Una possibile risposta potrebbe essere una calcolatrice che
prende le sequenze di numeri e operatori matematici che una persona immette, elabora
quei numeri e quelle operazioni per calcolare un risultato e quindi emette i risultati
su uno schermo per la persona.
D: Perché pensi che sia stato utilizzato un ciclo per
sempre nel progetto mostrato sopra?
R: È stato utilizzato un loop permanente in modo che il
sensore di visione controlli continuamente le istantanee multiple scattate per vedere se
un oggetto rosso entra in vista del sensore.