
Wat is een Vision-sensor?
![]() Teacher Toolbox
-
Het doel van deze pagina
Teacher Toolbox
-
Het doel van deze pagina
Deze pagina laat studenten kennismaken met wat een Vision Sensor is en enkele van de mogelijkheden ervan. De leerlingen analyseren vervolgens een gedeeltelijke afbeelding van een voorbeeldproject om te zien hoe de Vision Sensor kan worden gebruikt met VEXcode IQ.
De Motivate Discussion-vragen onderaan de pagina kunnen worden ingevuld als klassikale discussie of individueel in de engineering-notitieboeken van de studenten.
Omschrijving
Met de Vision Sensor kan uw robot visuele gegevens verzamelen van een live feed. Een live feed is een streaming transmissie van wat een videocamera vastlegt. De Vision Sensor is als een slimme camera die kleuren en objecten die in het gezichtsveld verschijnen kan observeren, selecteren, aanpassen en opslaan.

Mogelijkheden:
- Deze sensor kan worden gebruikt voor het herkennen van kleuren en kleurpatronen.
- Deze sensor kan worden gebruikt om een object te volgen.
- Deze sensor kan worden gebruikt om informatie over de omgeving te verzamelen.
Met de Vision-sensor kan de robot visuele invoergegevens uit zijn omgeving gebruiken. Het project kan dan bepalen hoe de visuele invoergegevens het gedrag van de robot moeten beïnvloeden. De robot kan bijvoorbeeld acties (output) uitvoeren zoals draaiende motoren of resultaten weergeven op het LCD-scherm.
De Vision Sensor kan ook een momentopname maken van wat ervoor staat en deze analyseren op basis van wat de gebruiker vraagt. Een gebruiker kan bijvoorbeeld gegevens verzamelen uit de momentopname, zoals, welke kleur heeft het object? Is er überhaupt een object gedetecteerd? Hoe groot is het object (breedte en hoogte)?
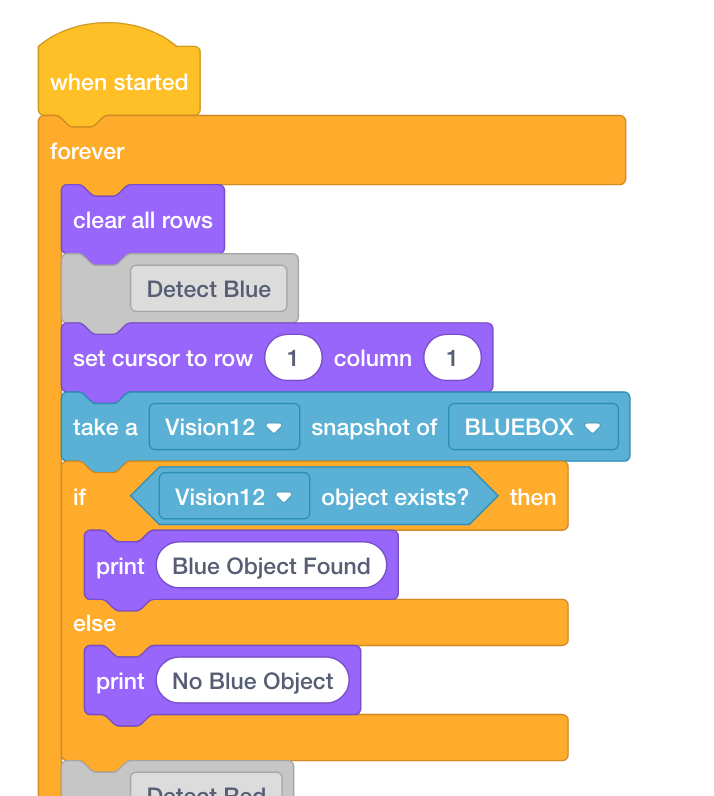
De robot kan dan beslissingen nemen op basis van deze gegevens. Het onderstaande gedeeltelijke voorbeeldproject laat zien hoe dit wordt gedaan. In dit eerste deel van het voorbeeldproject zal de robot "Blue Object Found" afdrukken als een blauw object wordt gedetecteerd en anders "No Blue Object". Dat is de eerste van drie beslissingen binnen het voorbeeldproject, maar de tweede en derde beslissingen worden hier niet weergegeven.
![]() Motiveer discussie
Motiveer discussie
V: Welke soorten menselijke taken zouden baat hebben bij de hulp van een robot met een zichtsensor?
A: Luister naar menselijke taken die baat zouden hebben bij het vermogen om op afstand in omgevingen te kijken en/of de omgeving te manipuleren (bijv. het observeren van dieren in het wild, het ontwapenen van explosieven of het uitvoeren van robotondersteunde operaties).
V: Geef een apparaat een naam en beschrijf hoe het gebruikmaakt van invoer, uitvoer en proces.
A: Een mogelijk antwoord zou een rekenmachine kunnen zijn die de reeksen getallen en wiskundige operatoren neemt die een persoon invoert, die getallen en bewerkingen verwerkt om een resultaat te berekenen en vervolgens op een scherm voor de persoon uitvoert.
V: Waarom denk je dat er een forever loop is gebruikt in het hierboven getoonde project?
A: Er is gebruik gemaakt van een forever loop zodat de Vision Sensor continu de meerdere gemaakte snapshots controleert om te zien of er een rood object in het zicht van de sensor komt.