
Lezione 3: Utilizzo del feedback del sensore riportato per raccogliere i dischi
Questa lezione utilizzerà il feedback del sensore riportato per risolvere la stessa sfida della lezione 2. Il robot VR raccoglierà e sposterà il primo disco blu nell'obiettivo blu.
-
Avviare un nuovo progetto in VEXcode VR e denominare il progetto Unit8Lesson3.

-
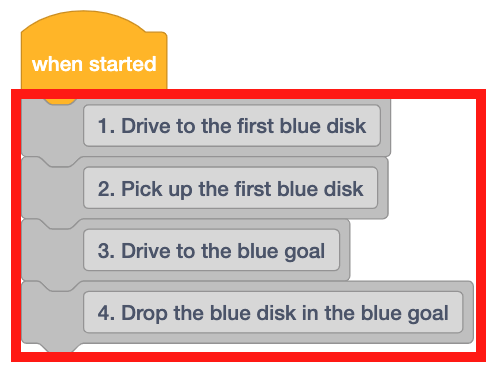
Trascina quattro blocchi Commento nell'area di lavoro. Aggiungere commenti per ciascuno dei passaggi necessari al Robot VR per guidare sul primo disco, raccoglierlo e riportarlo all'obiettivo blu.
-
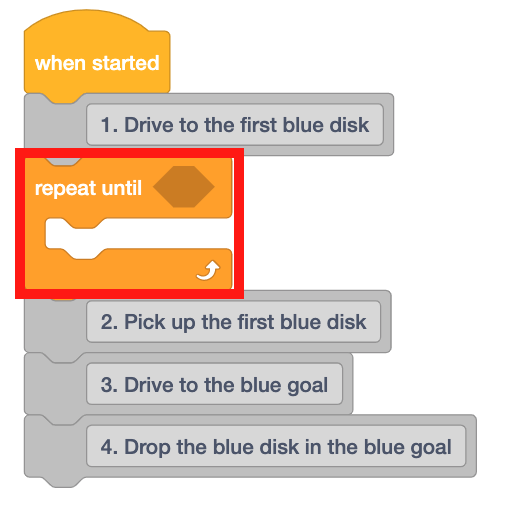
Trascina un blocco [Ripeti fino a] nell'area di lavoro sotto il primo commento.
Per tua informazione
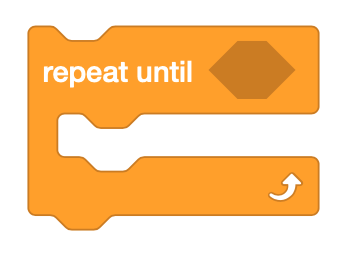
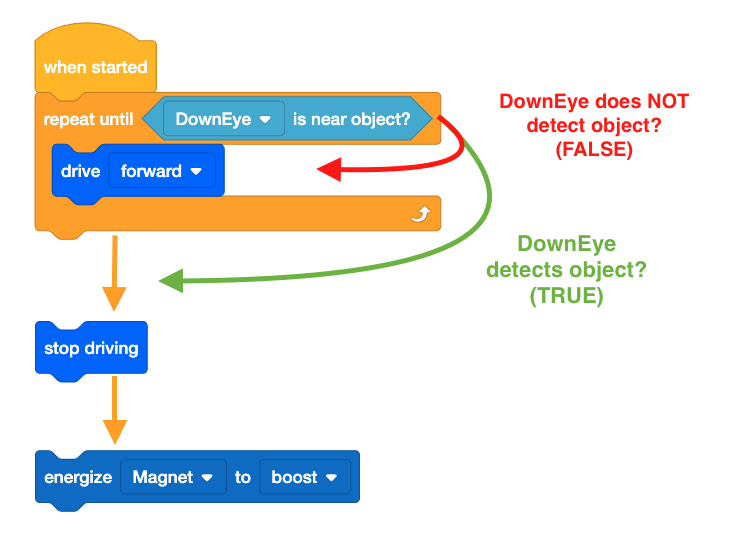
Il blocco [Repeat until] è un blocco C che accetta blocchi reporter booleani. Il blocco [Ripeti fino a] controllerà solo la condizione booleana all'inizio di ogni ciclo. Se la condizione booleana viene segnalata come FALSA, i blocchi all'interno verranno eseguiti. Se la condizione booleana viene riportata come VERA, i blocchi all'interno verranno saltati.
-
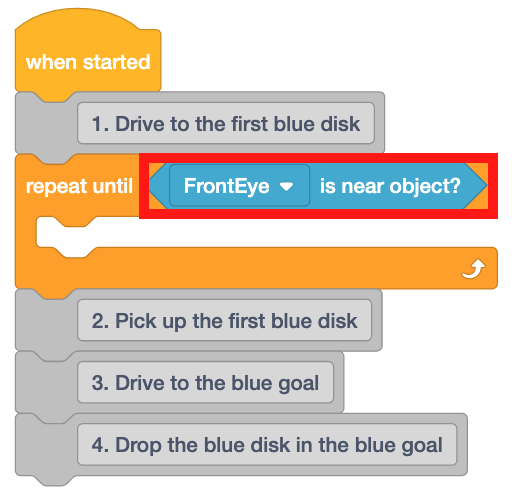
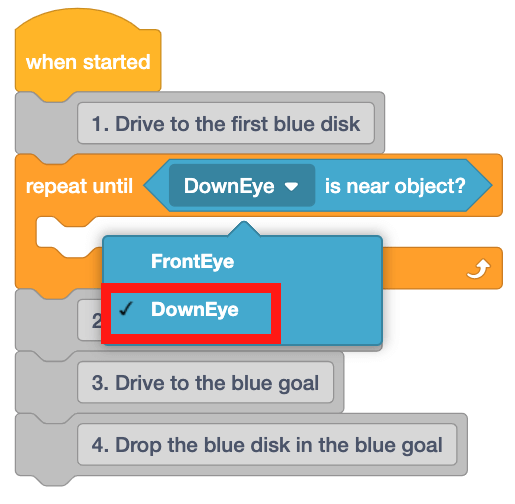
Il <Eye Sensor near object> blocco riporta TRUE quando il Robot VR rileva un disco colorato sul Disk Mover Playground. Trascina questo blocco nel progetto.
-
I dischi del Disk Mover Playground si trovano sul pavimento del parco giochi e non possono essere rilevati dal sensore oculare anteriore. Per questo motivo, imposta il <Eye Sensor near object> blocco su "DownEye".
-
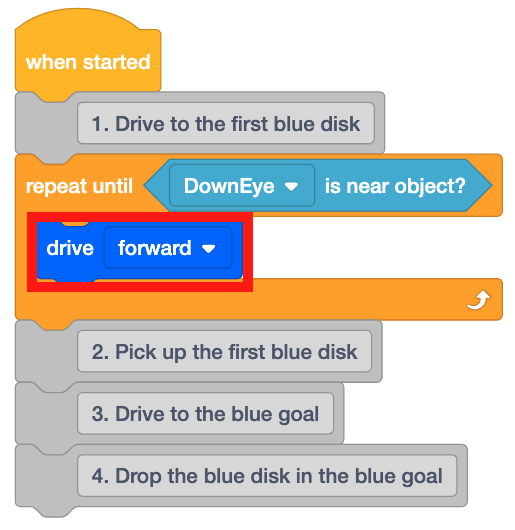
I blocchi all'interno del blocco [Ripeti fino a] verranno eseguiti quando il robot VR NON rileva un oggetto. Per raggiungere uno dei dischi, il robot VR dovrà avanzare fino a quando il disco non viene rilevato.

-
Trascinare un blocco [Drive] nel blocco [Repeat until].
-
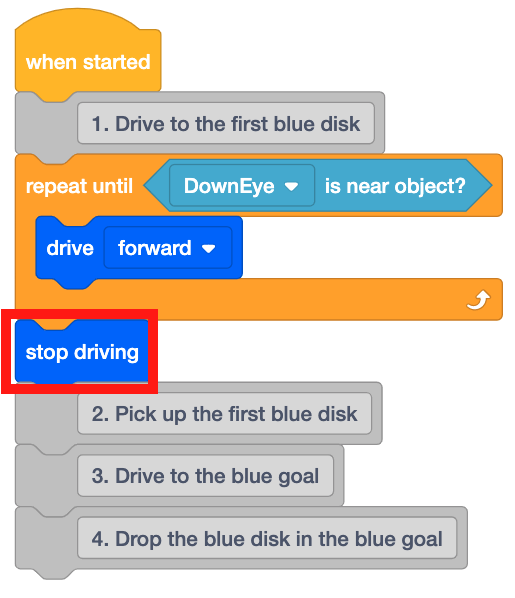
Quando viene rilevato un disco, il robot VR dovrà smettere di guidare per raccoglierlo. Trascina un blocco [Stop driving] e posizionalo sotto il blocco [Repeat until].
-
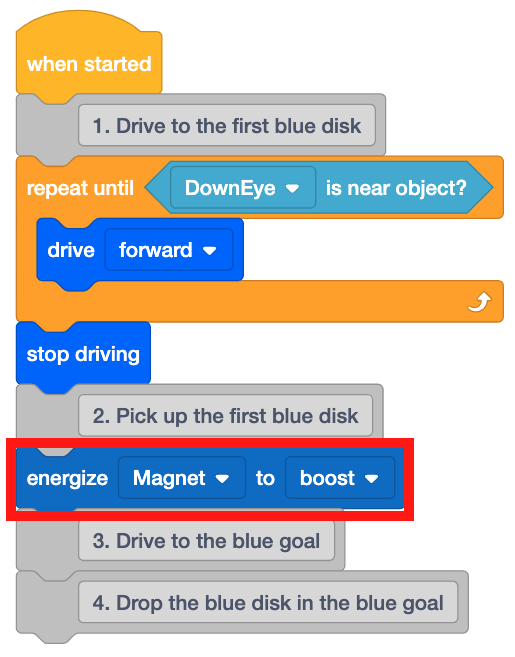
Ora, istruisci il robot VR a raccogliere il disco con l'elettromagnete posizionando un blocco [Energize Electromagnet] sotto il secondo commento.
- Aprire il Disk Mover Playground se non è già aperto ed eseguire il progetto.
-
Il robot VR avanza fino a quando il primo disco blu non viene rilevato dal sensore Down Eye, smette di guidare e alimenta l'elettromagnete per raccogliere il disco.

- Nota come funziona il blocco [Ripeti fino a] in questo progetto.
- Una volta che il sensore Down Eye sul robot VR rileva un oggetto, il progetto passa al blocco successivo nella pila sotto il blocco [Ripeti fino a].
- In questo progetto, ciò significava che il robot VR smetteva di guidare e alimentava l'elettromagnete.
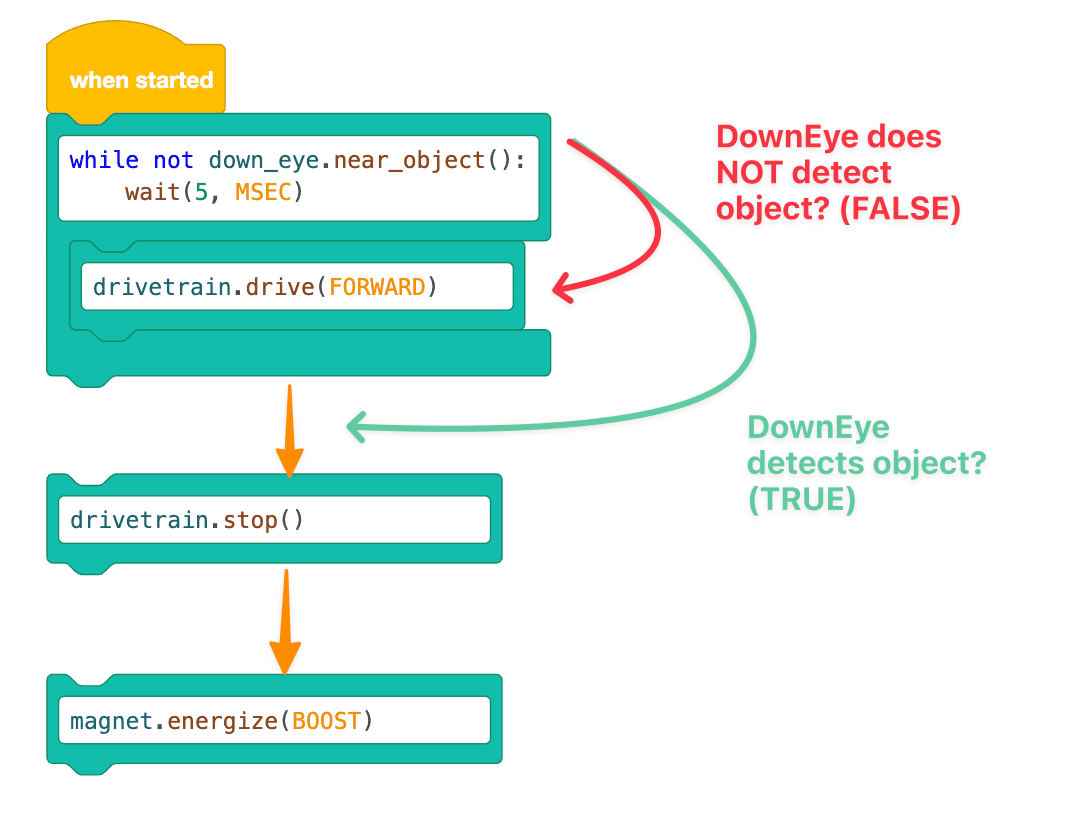
Utilizzo di blocchi di interruttori
L'immagine seguente mostra il grafico del flusso di lavoro di questa lezione utilizzando i blocchi Switch. Confrontare questo grafico con il grafico precedente può aiutarti a comprendere meglio il flusso di lavoro dei nuovi comandi Switch Python che stai imparando.
Selezionare il pulsante Avanti per continuare con il resto della lezione.