
Lezione 3: Utilizzo del feedback del sensore riportato per posizionare i dischi nell'obiettivo
Nella lezione 2, il robot VR ha guidato in retromarcia fino al punto di partenza per rilasciare il disco. Ciò ha richiesto all'utente di calcolare la distanza esatta da percorrere per il robot VR. Questo potrebbe non essere sempre possibile. Invece, il robot VR può utilizzare i valori del sensore riportati per raccogliere e rilasciare i dischi con precisione costante.
La lezione 3 utilizza il feedback del sensore riportato per determinare dove il robot VR dovrebbe smettere di guidare quando ritorna all'obiettivo. Nell'utilizzare il <Eye Sensor near object> blocco in precedenza in questa lezione, non è necessario conoscere la distanza dall'obiettivo a ciascun disco.

Il robot VR tornerà verso l'obiettivo blu utilizzando i dati del sensore di distanza per determinare dove interrompere la guida. Una volta che il robot VR si è fermato all'interno dell'obiettivo blu, il robot VR lascerà cadere il disco blu.
- Continua a lavorare nel progetto Unit8Lesson3.
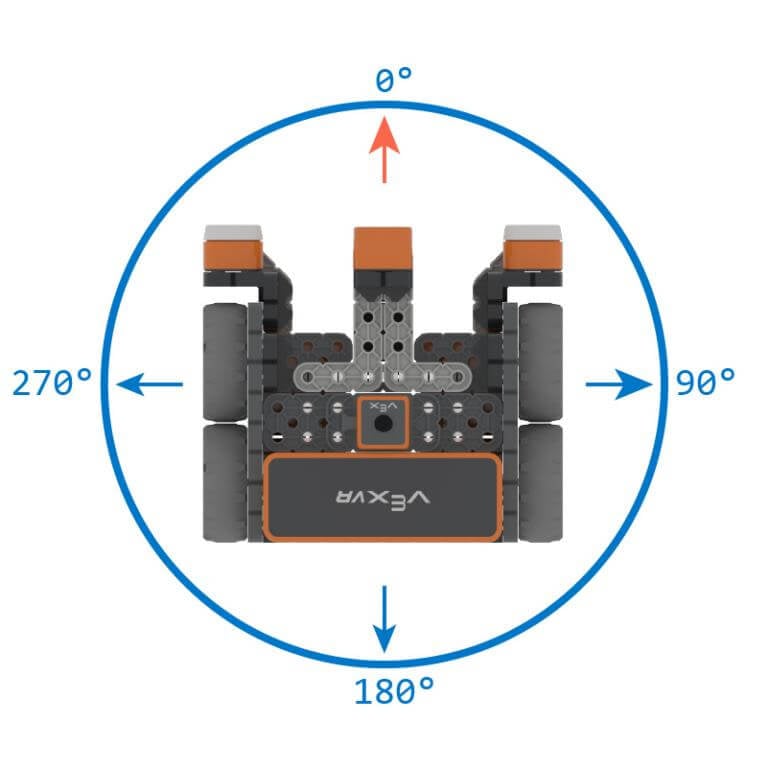
- Il sensore di distanza misura la distanza dalla parte anteriore del robot VR all'oggetto più vicino. Per questo motivo, il robot VR dovrà ruotare di 180 gradi prima di tornare verso l'obiettivo blu.
- Il robot VR utilizzerà il sensore di distanza con la parete posteriore del parco giochi per determinare dove far cadere il disco. Per questo motivo, il robot VR dovrà ruotare di 180 gradi prima di tornare verso l'obiettivo blu.
-
Il blocco [Turn to heading] può essere utilizzato per garantire che il robot VR si giri nella direzione corretta.
Utilizzo di blocchi di interruttori
Questo è il blocco Interruttore [turn to heading]. È possibile modificare il grado di virata modificando il valore numerico tra parentesi. Ricorda che il numero deve essere scritto prima dell'unità di misura (GRADI), separati da una virgola.
Per tua informazione
Il blocco [Turn to heading] trasforma il robot VR in una voce specifica utilizzando il sensore giroscopico. La direzione in cui il robot VR girerà (a sinistra o a destra) è determinata in base alla direzione corrente del sensore giroscopico. Il blocco [Turn to heading] viene utilizzato per indirizzare il robot VR verso una direzione specifica indipendentemente dalla posizione del robot VR. Quando si solleva o si rilascia un disco, il robot VR potrebbe andare fuori rotta. L'utilizzo del blocco [Turn to heading] garantisce che il Robot VR si giri nella posizione assoluta piuttosto che in una posizione relativa all'intestazione precedente.
-
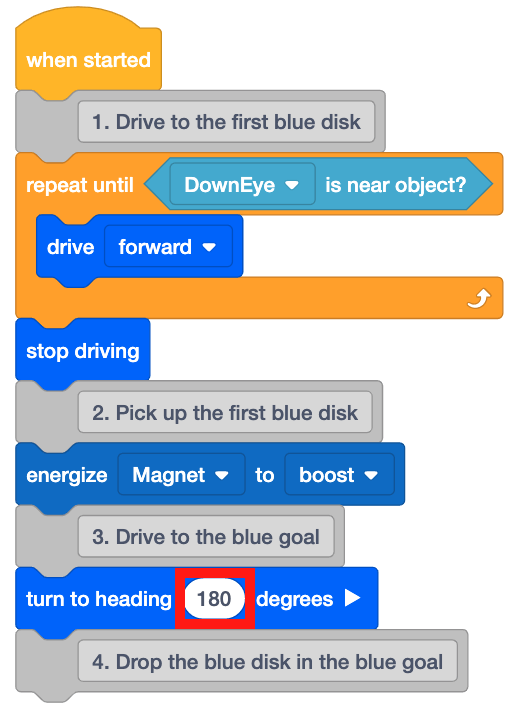
Aggiungi un blocco [Turn to heading] sotto il terzo commento.

-
Impostare il blocco [Turn to heading] a 180 gradi.
-
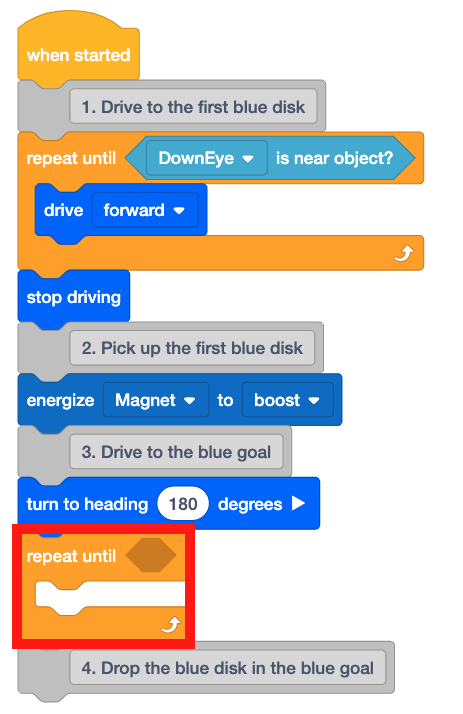
Ora che il robot VR è orientato verso la posizione di partenza, il robot VR dovrà tornare all'obiettivo blu. Aggiungere un blocco [Repeat until] sotto il blocco [Turn to heading].
-
Per tornare all'obiettivo blu, il robot VR utilizzerà i dati del sensore di distanza per determinare quando il robot VR si trova all'interno dell'obiettivo blu. Come discusso nella lezione precedente, ogni quadrato della griglia sul Disk Mover Playground misura 200 millimetri (mm) per 200 millimetri (mm).

-
Utilizzando tali misurazioni, è possibile determinare che il centro dell'obiettivo blu si trova a circa 200 millimetri (mm) dalla parete del parco giochi.

-
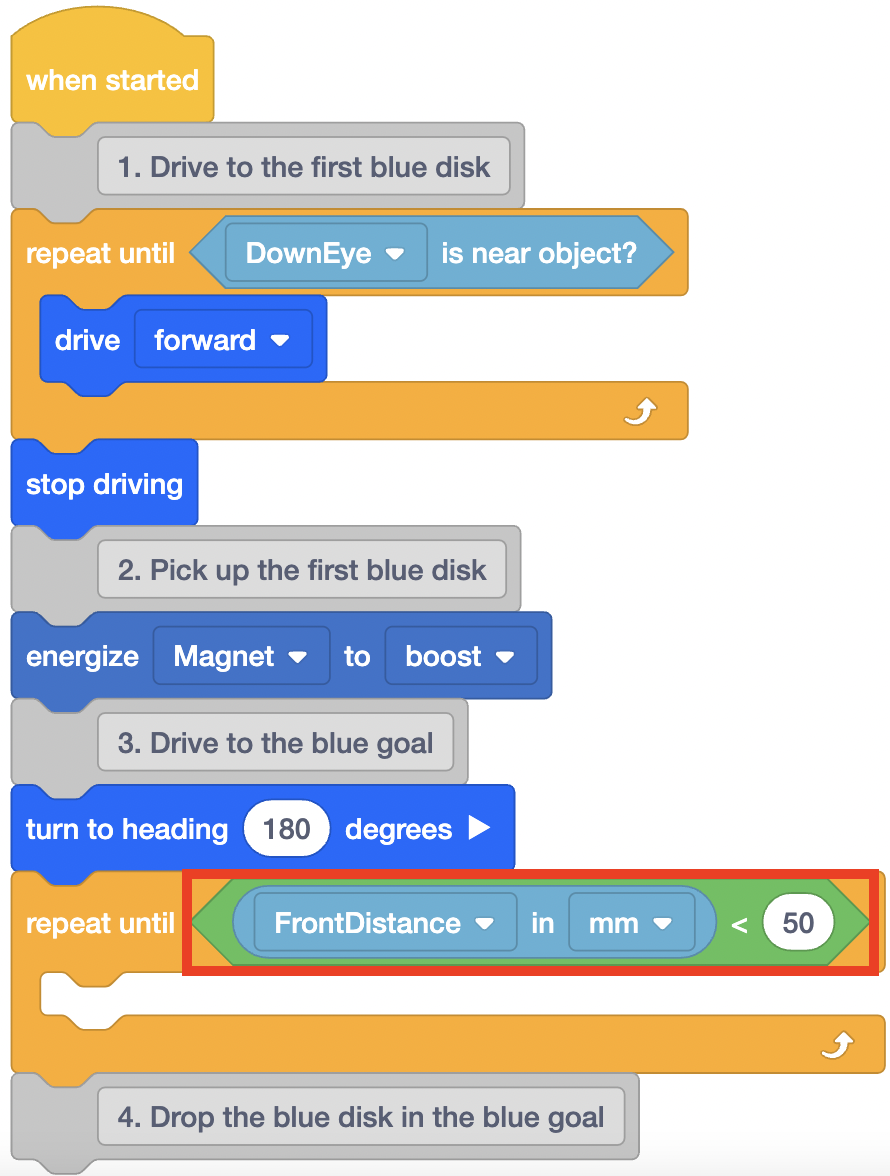
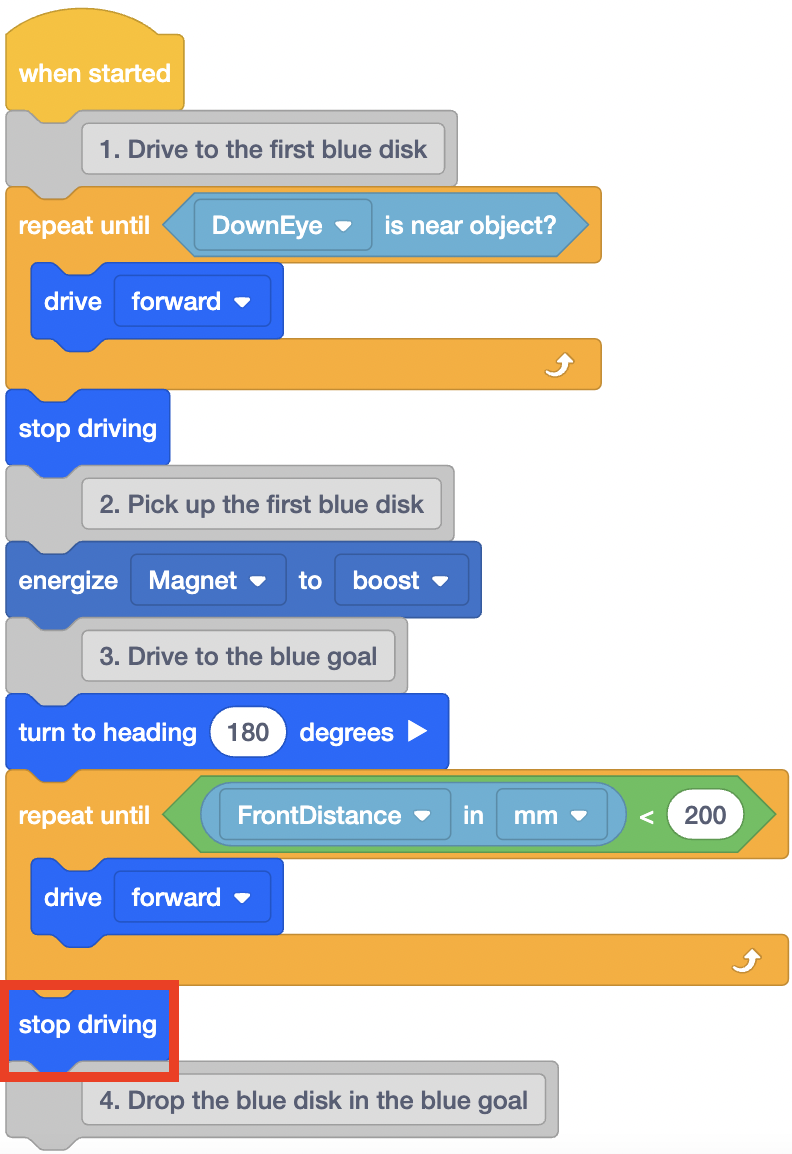
Il robot VR dovrebbe smettere di guidare quando il sensore di distanza segnala che il robot VR si trova a meno di 200 millimetri (mm) dalla parete del parco giochi. Aggiungere i seguenti blocchi al blocco [Ripeti fino a].
-
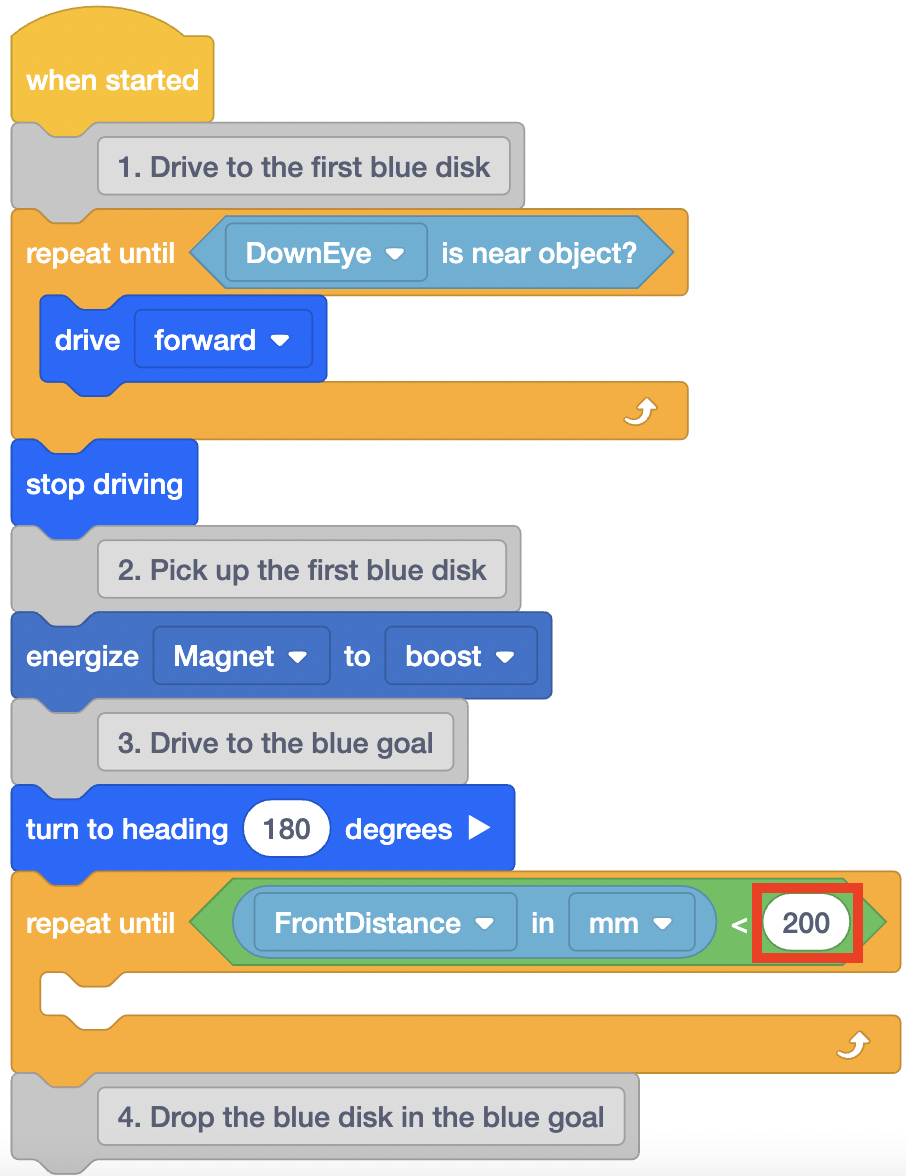
Modificare il parametro nel <Less than> blocco a 200.
-
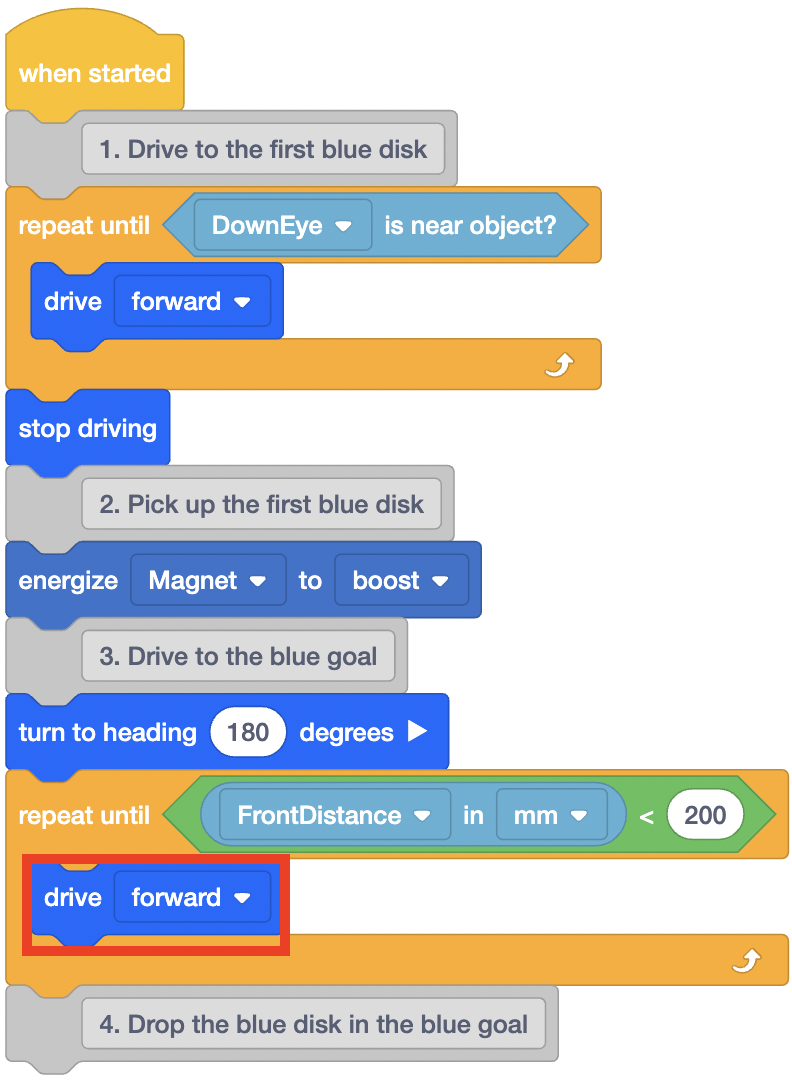
Aggiungere un blocco [Drive] in questo blocco [Repeat until]. Questo istruirà il robot VR a guidare in avanti fino a quando il sensore di distanza segnala una distanza inferiore a 200 millimetri (mm).
-
Una volta che il robot VR ha raggiunto l'obiettivo blu (200 mm dalla parete), il robot VR dovrà smettere di guidare. Aggiungere un blocco [Stop driving] sotto il blocco [Repeat until].
-
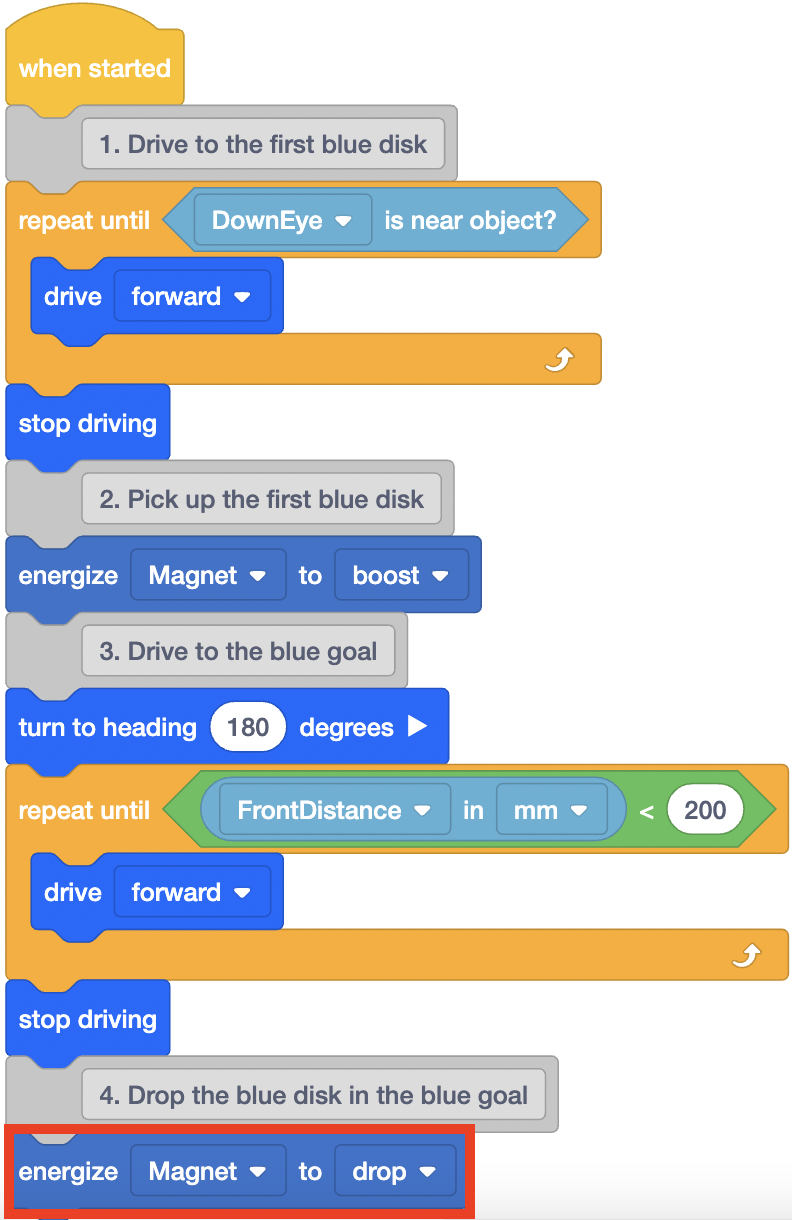
Ora che il robot VR è fermo nell'obiettivo blu, può far cadere il disco. Aggiungere un blocco [Energize Electromagnet] sotto il quarto commento e impostare il blocco su "drop".
-
Il robot VR dovrà guidare in retromarcia a breve distanza per evitare il ribaltamento o la collisione con i dischi. La collisione con un disco potrebbe potenzialmente far andare fuori rotta il robot VR. Aggiungere i seguenti blocchi per indicare al robot VR di guidare in retromarcia per 100 millimetri (mm) e tornare a una direzione di 0 gradi.

- Aprire il Disk Mover Playground se non è già aperto ed eseguire il progetto.
-
Il robot VR avanza, raccoglie il primo disco, quindi si gira a una direzione di 180 gradi per affrontare l'obiettivo blu. Il robot VR utilizza quindi i valori del sensore di distanza per determinare quando interrompere la guida e rilasciare il disco blu.

- Nota come funziona il secondo blocco [Ripeti fino a] in questa parte del progetto.
- Quando il sensore di distanza sul robot VR rileva che la parete del parco giochi è a meno di 200 millimetri (mm) di distanza, il progetto si sposterà al blocco successivo nella pila sotto il blocco [Ripeti fino a].
- In questo progetto, ciò significava che il robot VR smetteva di guidare e lasciava cadere l'elettromagnete nell'obiettivo blu.
Selezionare il pulsante Avanti per continuare con il resto della lezione.