4과: [Forever] 블록 사용하기
반복적으로 조건 확인
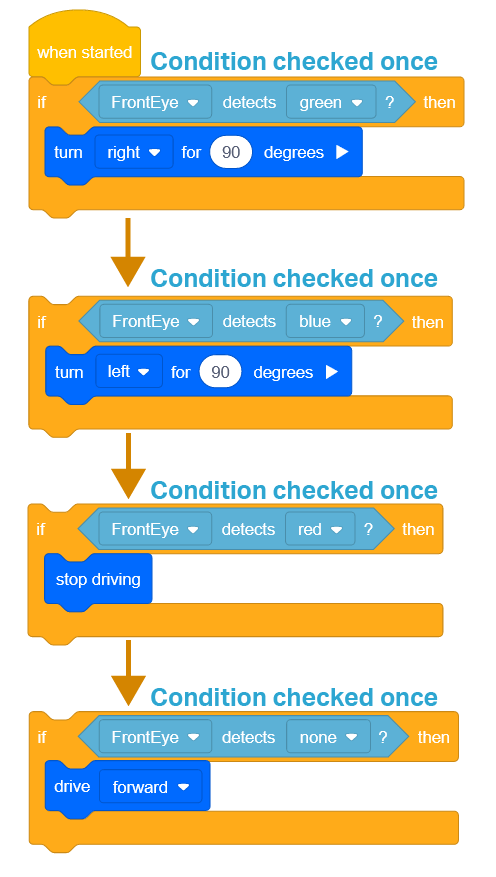
이전 레슨에서 살펴본 것처럼 [If then] 블록은 조건을 한 번만 확인합니다. [If then] 블록에 포함된 조건을 반복적으로 확인하기 위해서는 [Forever] C 블록이 필요합니다. [Forever] 블록은 Control 카테고리의 C 블록으로, 블록 안에 포함된 동작을 영원히 반복합니다.
-
이전 수업의 Unit7Lesson3 프로젝트를 불러옵니다.
-
프로젝트 이름을 Unit7Lesson4로 바꾸세요.

-
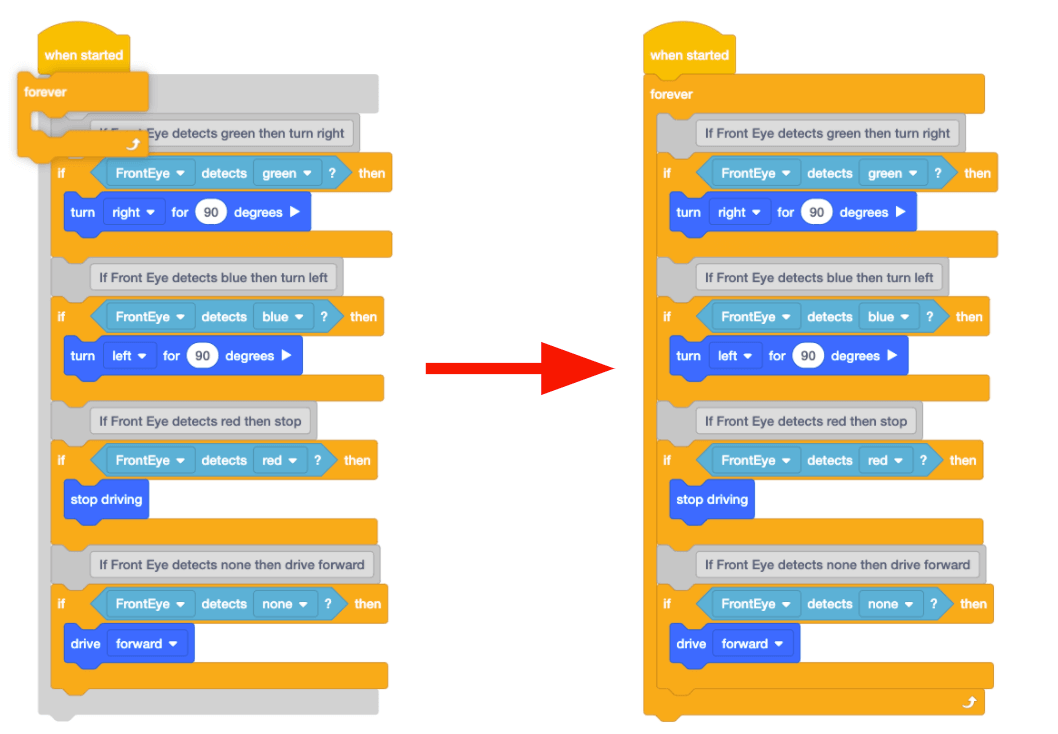
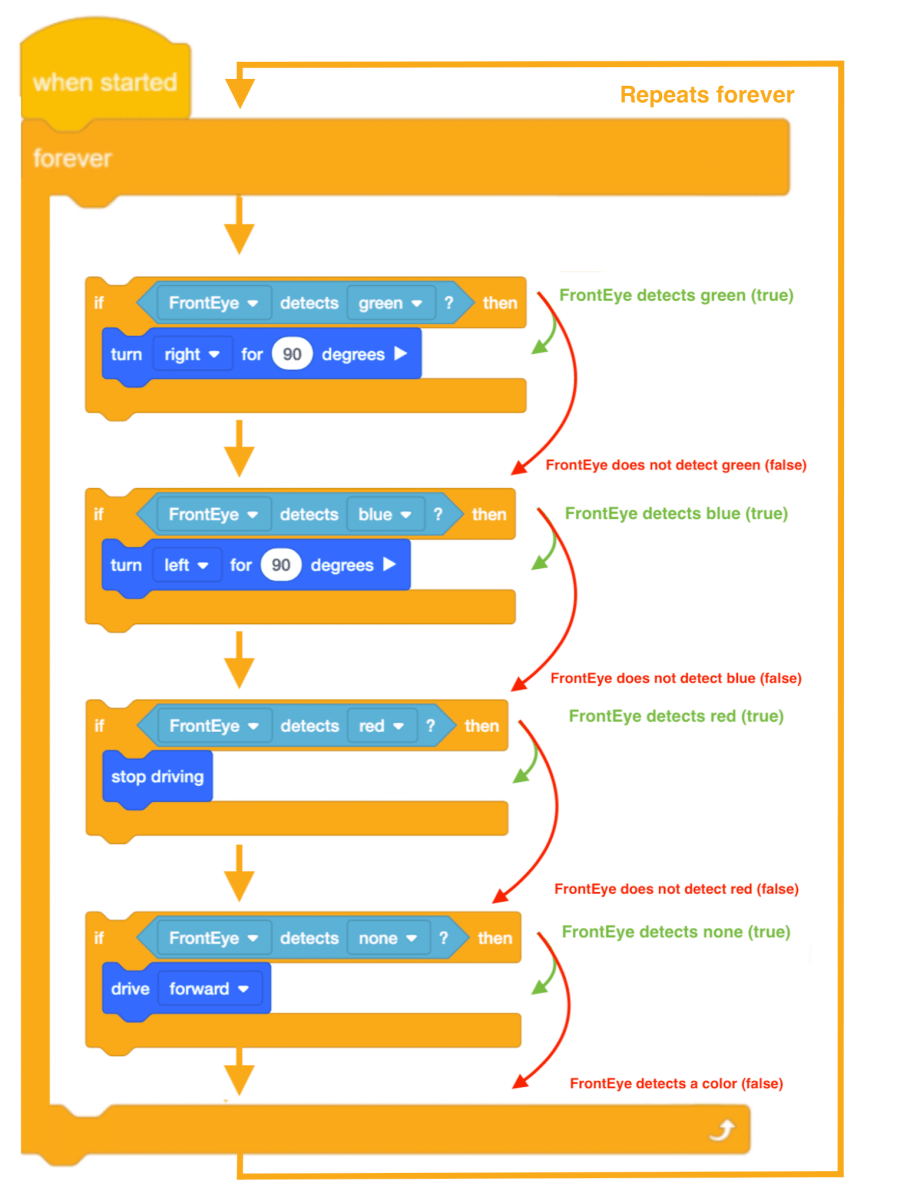
[영구] 블록을 작업 공간으로 끌어서 블록 스택의 맨 위에 붙입니다. [Forever] 블록 안에 있는 [If then] 블록 4개가 모두 포함된다는 점에 유의하세요.
귀하의 정보를 위해
블록을 프로젝트 스택의 시작이나 중간에 추가하려면 블록의 상단을 스택의 원하는 위치에 맞춰 정렬합니다.
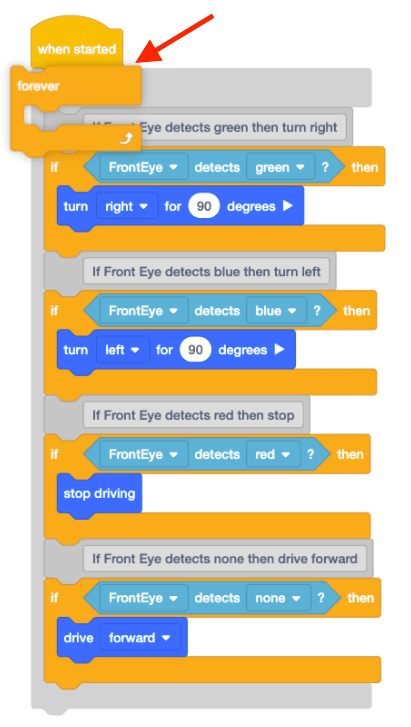
아래 영상은 현재 프로젝트의 4개 [If then] 블록 주위에 [Forever 블록]을 추가하는 방법을 보여줍니다. [Forever] 블록의 상단이 [When started]와 첫 번째 [If then] 블록 바로 뒤에 정렬되어 있는 것을 주목하세요. [Forever] 블록은 프로젝트 스택의 모든 후속 블록을 래핑합니다.
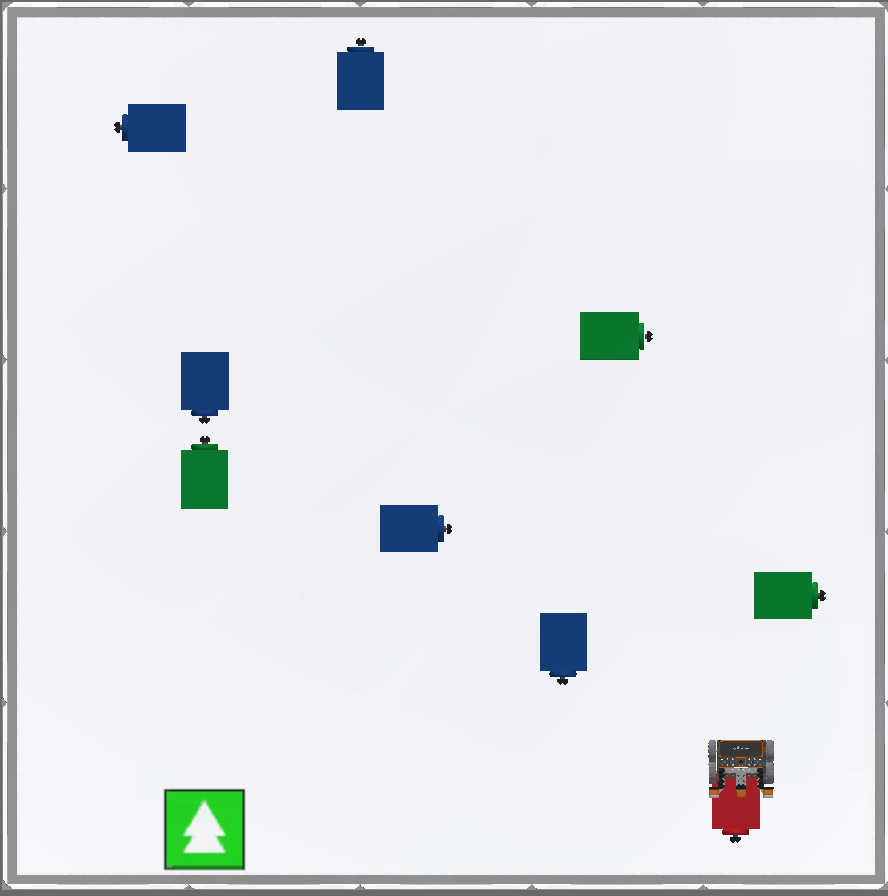
- 이제 [Forever] 블록이 프로젝트에 추가되어 모든 [If then] 블록의 조건이 지속적으로 확인되도록 Disk Maze Playground 을 열고 프로젝트를 실행합니다.
-
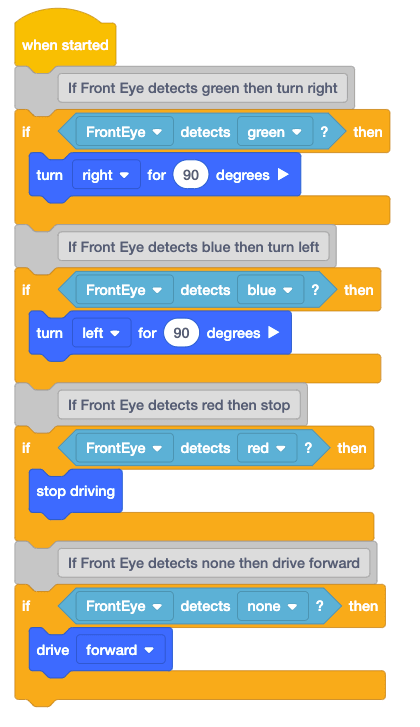
이 프로젝트가 실행되면 VR 로봇은 처음부터 끝까지 디스크 미로 놀이터 탐색하게 됩니다. VR 로봇이 빨간색을 감지하면 운전을 멈춥니다.
-
이전 수업의 프로젝트에서는 [If then] 블록 내의 조건은 한 번만 확인되었습니다. [If then] 블록 내부의 조건이 한 번만 검사되었기 때문에 색상이 감지되지 않는다는 조건이 TRUE로 보고되어 VR 로봇은 영원히 앞으로 나아갔습니다.
-
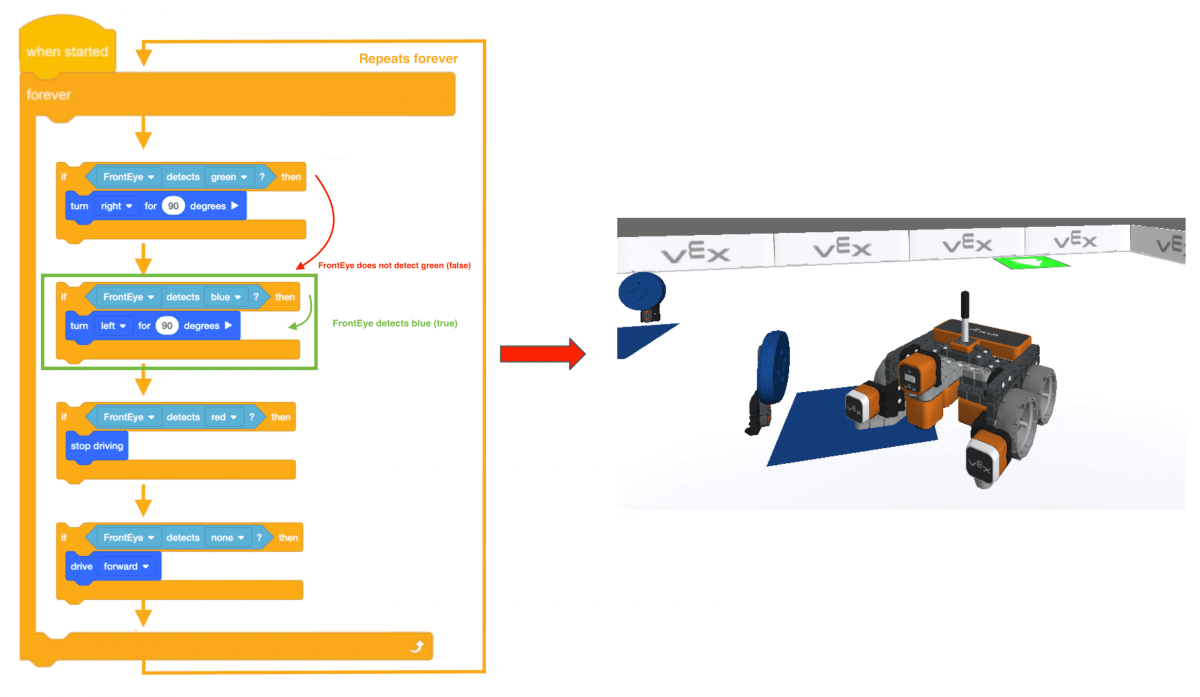
이제 [Forever] 블록이 추가되었으므로 [If then] C 블록의 각 조건이 반복적으로 확인됩니다. 프로젝트 흐름 중에 [If then] C 블록의 조건이 TRUE이면 [If then] C 블록 내부의 블록들이 실행됩니다. [If then] C 블록의 조건이 FALSE이면, [If then] C 블록 내부의 블록은 건너뛰어지고, 프로젝트의 흐름은 스택의 다음 블록으로 계속됩니다. 이를 통해 VR 로봇은 특정 색상을 감지하면 회전하거나 멈추는 등 개별적인 동작을 수행할 수 있습니다.
-
[If then] 블록은 [Forever] 블록과 함께 사용되어 조건이 지속적으로 확인되도록 합니다.
스위치 블록 사용
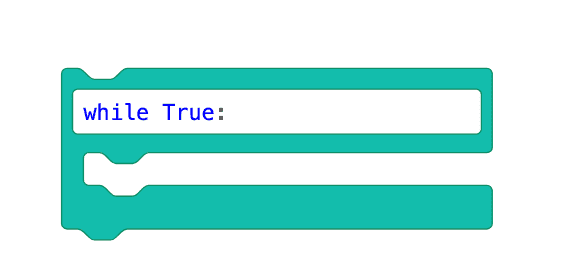
이것은 Switch [Forever] 블록입니다. Forever 에 대한 Switch Python 명령어는 조건이 True인 while 루프를 생성합니다. 루프 내에 중첩된 명령은 조건이 항상 참이므로 영원히 반복될 수 있습니다.