Lesson 1: Eye Sensors in a VEXcode VR Project
Using the Eye Sensors in a VEXcode VR Project
The Eye Sensors on the VR Robot can be used in many ways. Note that the Down Eye Sensor does not detect the floor of a Playground as an object. Other items, such as disks, will register as objects. The Front Eye Sensor does detect walls in the Playgrounds.
The Eye Sensors can detect the color of an object near the sensor, such as the colored disks in the Disk Maze Playground. This is useful if you want the VR Robot to sort differently colored objects, drive up to a specifically colored object, or perform different behaviors based on the color of an object detected.
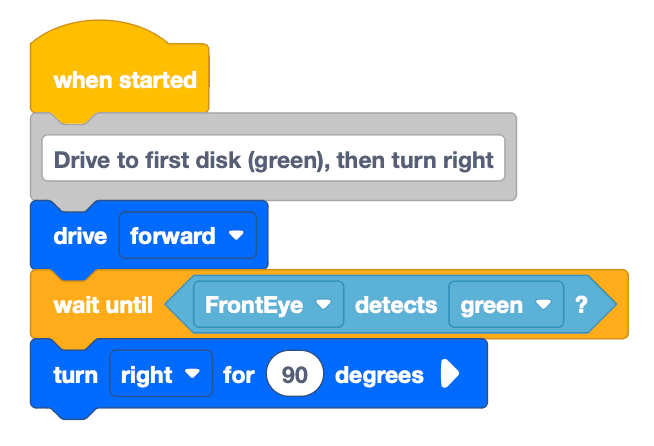
In this project, the VR Robot will drive forward until the Front Eye detects a green object. Once a green object is detected, the VR Robot will turn right.