
관행
지난 섹션에서는 모터 그룹과 VEXcode EXP에서 모터 그룹을 구성하는 방법에 대해 알아보았습니다. 이제 로봇에 반복해서 적용하여 Over the Barrier 연습 활동을 완료해 보겠습니다.
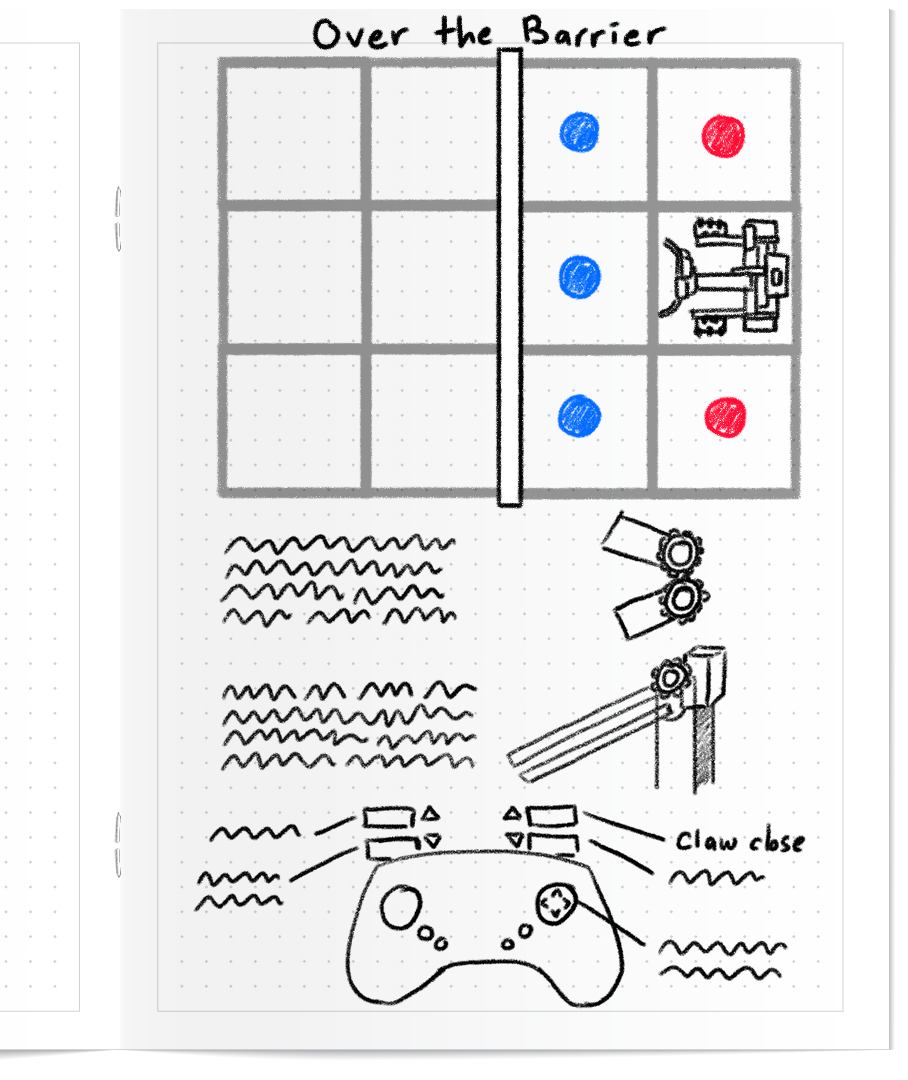
이 활동에서는 컨트롤러를 사용하여 로봇을 조종하여 필드 한쪽에서 장벽을 넘어 반대쪽으로 버키볼 5개를 옮겨야 합니다. 로봇이 버키볼을 장벽 너머로 옮길 수 있는 능력을 향상시키기 위해 빌드의 디자인을 반복합니다. 아래 영상을 시청하고, 배운 내용을 적용하여 Over the Barrier 연습 활동을 완료하는 방법을 알아보세요.
이제 장벽 넘기 연습 활동을 완료할 차례입니다!
이 애니메이션에서는 컨트롤러를 사용해 로봇을 각 버키볼로 이동시키고, 버키볼을 수집한 후 장벽을 넘어 반대편으로 옮깁니다. 이 애니메이션은 로봇이 장벽 넘기 연습 활동을 완료하기 위해 이동할 수 있는 한 가지 가능한 방법을 보여줍니다.
이 문서를 참고하여 연습 활동을 완료하세요.
장벽을 넘는 연습 활동을 완료하면 엔지니어링 노트북에 다음 내용을 기록하세요.
- 로봇 디자인을 설명하고 그림으로 표현해 보세요. 발톱과 팔 디자인을 어떻게 함께 사용하여 활동을 완료할 수 있나요?
- 로봇에 모터 그룹을 추가하면 더 나은 결과를 얻을 수 있을까요? 모터 그룹에 사용할 추가 모터를 추가하기 위해 디자인을 어떻게 편집할 수 있나요?
- 활동을 완료한 각 운전자의 이름과 점수 등 운전자 데이터를 수집합니다.
디자인 아이디어와 테스트를 기록하는 방법에 대한 예는 왼쪽 이미지를 참조하세요.
도전에 대비하세요
경쟁(다음 페이지)에서 Up and Over 챌린지에서 여러분의 디자인을 테스트하게 됩니다. 도전 과제에 참여하는 방법을 배우고, 이해도를 확인한 다음, 도전 과제를 위해 연습하세요.