
배경
디지털 시민 단원은 학생들에게 컴퓨팅이 우리 사회에 미치는 영향을 조사, 모델링하고 논의하는 경험을 제공하도록 설계되었습니다. 그들은 지역 사회의 긴급한 문제를 해결하기 위해 로봇을 코딩하는 데 협력해야 하는 적극적인 디지털 시민으로서의 역할에 몰두하게 될 것입니다. 그들은 솔루션을 만들 때 다른 사람들의 다양한 요구와 관점을 고려해야 하는 임무를 맡게 될 것입니다. 또한, 학생들은 이 단원의 활동을 완료하면서 비밀번호를 비밀로 유지하는 방법, 다른 사람의 아이디어를 적절하게 활용하는 방법 등 필수적인 디지털 시민의식 기술을 연습합니다.
컴퓨팅과 디지털 시민권의 영향
새로운 기술의 발전은 학생들의 삶의 모든 측면에 긍정적, 부정적 영향을 미칩니다. 인터넷, 소셜 미디어, 로봇공학과 같은 기술의 발전은 학생들에게 새로운 방식으로 세상과 소통할 수 있는 엄청난 기회를 제공하지만, 동시에 새로운 윤리적 딜레마도 제공합니다. 젊은 학생들이 기술을 사용하여 자신의 삶을 개선하고 다양한 배경, 능력, 필요를 가진 사람들에게 세상을 더 나은 곳으로 만드는 방법을 이해할 수 있도록 하는 경험과 대화에 참여하는 것이 중요합니다.
더 나은 문제 해결을 위한 포괄적 컴퓨팅
학생들이 탐구해야 할 중요한 개념 중 하나는 문제를 해결하기 위해 협업할 때 다양한 아이디어와 관점을 통합하는 것이 어떻게 더 나은 혁신으로 이어지고 더 강력한 결과를 낳는지에 대한 것입니다. 예를 들어, 국제 우주 정거장을 생각해 보세요. 23개국의 과학자와 우주인이 다양한 연구 프로젝트에 협력하고 있습니다. 이러한 프로젝트는 암 치료법을 개선하고, 도시의 기온을 낮추고, 로봇 팔의 성능을 향상시키는 등 인류에게 많은 혜택을 주었습니다.
또 다른 밀접하게 연관된 개념은 컴퓨팅 기술의 개발과 개선이 다양한 집단의 요구에 의해 이루어진다는 생각입니다. 즉, 학생들이 기술을 사용하여 문제를 해결하는 방법을 배울 때, 다양한 배경, 능력 수준, 전망을 가진 사용자의 관점을 고려하는 것이 필수적입니다. 음성-텍스트 기술은 이런 종류의 혁신의 널리 사용되는 예입니다. 원래는 손을 사용해서 글을 쓰거나 타이핑하는 데 어려움을 겪는 사람들을 돕기 위해 만들어졌습니다. 지금은 스마트폰이나 다른 기기를 가진 거의 모든 사람이 이 기능을 사용하여 더 안전하게 운전할 수 있고, 손이 가득 차 있을 때에도 질문에 대한 답변을 즉시 얻을 수 있습니다.
안전하고 윤리적인 컴퓨팅
학생들이 포괄적인 혁신가가 되는 법을 배우는 동안, 우리는 그들이 안전하고 적절한 방식으로 기술을 사용하도록 보장해야 합니다. 우수한 디지털 시민은 아날로그 세계에서와 마찬가지로 디지털 영역에서도 사회적 규칙을 따라야 합니다. 우리는 학생들에게 어릴 때부터 '부탁드립니다'와 '감사합니다'를 말하고, 다른 사람의 말을 가로채지 않고, 차례를 지키도록 가르칩니다. 학생들에게 비밀번호를 항상 비밀로 유지하는 것과 다른 사람의 아이디어와 자료를 사용할 때 적절한 허가를 받고 출처를 명시하는 것과 같은 디지털 시민의식 규칙을 가르치는 것도 마찬가지로 중요합니다.
경로 계획이란 무엇인가요?
경로 계획은 로봇을 실제로 코딩하기 전에 프로젝트를 가능한 가장 작은 로봇 동작으로 분해하는 과정입니다. 추측하고 확인하는 것보다 로봇이 과제를 해결하거나 작업을 완료하도록 코딩하는 것이 훨씬 더 효과적인 방법입니다.
경로 계획의 단계는 다음과 같습니다.
- 로봇의 작업을 확인하세요. 로봇에게 무엇을 시키고 싶으신가요?
- 그 작업을 가능한 가장 작은 행동으로 나누어 보세요.
- 그러한 행동을 단계별로 적어보세요.
- 이 경우 경로를 그림으로 그리거나 로봇의 움직임을 연기하는 것이 도움이 될 수 있습니다.
- 가장 작은 동작이란 로봇이 특정 거리를 주행하거나 회전할 때마다, LED 범퍼가 깜박일 때마다 등을 의미합니다.
- 각 동작에 코드 블록을 첨부합니다.
VEXcode GO란 무엇인가요?
VEXcode GO는 VEX GO 로봇과 통신하는 데 사용되는 코딩 환경입니다. 학생들은 드래그 앤 드롭 인터페이스를 사용하여 로봇의 동작을 제어하는 VEXcode GO 프로젝트를 만듭니다. 각 블록의 용도는 모양, 색상, 라벨과 같은 시각적 단서를 사용하여 식별할 수 있습니다. VEXcode GO를 사용하는 방법에 대한 자세한 내용은 VEX 라이브러리의 VEXcode GO 섹션을 참조하세요.
이 단원에서는 다음 VEXcode GO 블록이 사용됩니다.
| VEX코드 GO 블록 | 행동 |
|---|---|
 |
시작 시 블록은 프로젝트가 시작될 때 첨부된 블록 스택을 실행하기 시작합니다. |
 |
블록의 드라이브는 드라이브트레인을 주어진 거리만큼 전진 또는 후진으로 이동합니다. 타원에 값을 입력하여 드라이브트레인이 얼마나 이동할지 설정합니다. |
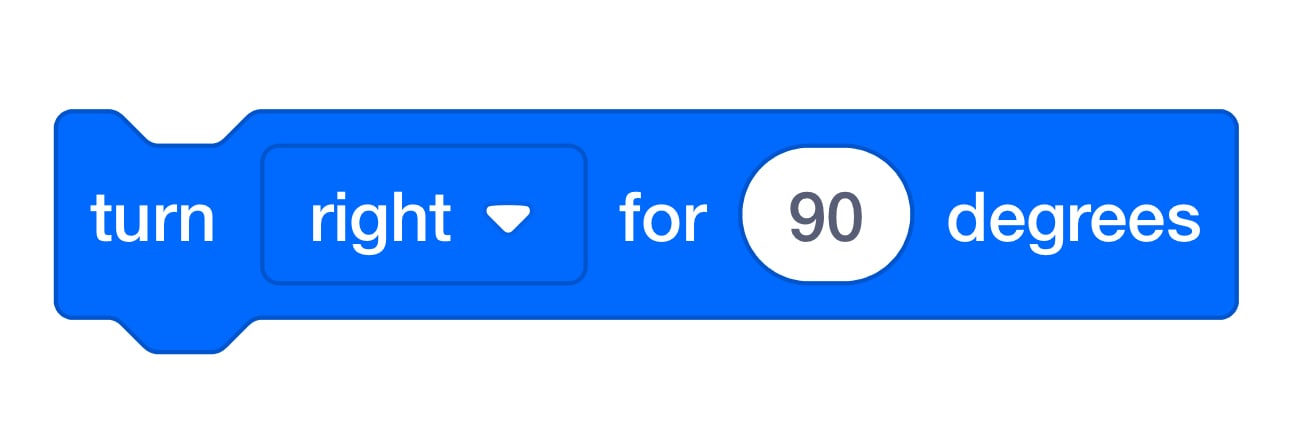 |
Turn for블록은 드라이브트레인을 주어진 거리만큼 회전시킵니다. 타원에 값을 입력하여 드라이브트레인이 얼마나 회전할지 설정합니다. |
 |
Wait블록은 프로젝트의 다음 블록으로 이동하기 전에 특정 시간 동안 기다립니다. |
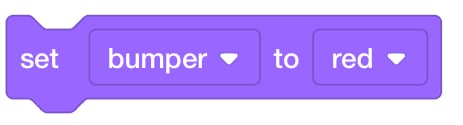 |
세트 범퍼 색상 블록은 LED 범퍼의 색상을 설정합니다. |
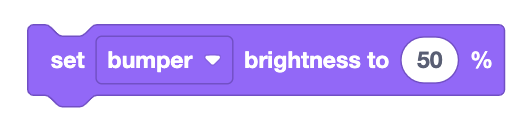 |
세트 범퍼 밝기 블록은 LED 범퍼의 밝기 레벨을 0~100%로 설정합니다. |
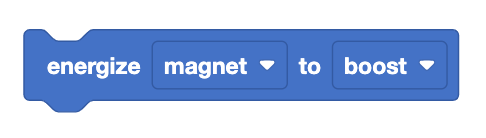 |
에너자이즈 전자석 블록은 자석을 설정하여 물체를 끌어올리거나(집어올리기) 떨어뜨리는(놓기) 데 사용됩니다.
|
 |
반복 블록은 블록 안에 있는 블록이 특정 횟수만큼 반복되도록 하는 C자 모양의 블록입니다. |