
พื้นหลัง
หน่วยพลเมืองดิจิทัลได้รับการออกแบบมาเพื่อมอบประสบการณ์ให้กับนักศึกษาในการตรวจสอบ สร้างแบบจำลอง และหารือเกี่ยวกับผลกระทบของการประมวลผลต่อสังคมของเรา พวกเขาจะได้ดื่มด่ำไปกับสถานการณ์ที่พวกเขาทำหน้าที่เป็นพลเมืองดิจิทัลเชิงรุกที่ต้องร่วมมือกันเขียนโค้ดหุ่นยนต์เพื่อแก้ไขปัญหาเร่งด่วนในชุมชนของตน พวกเขาจะได้รับมอบหมายให้พิจารณาถึงความต้องการและมุมมองที่หลากหลายของผู้อื่นในขณะที่สร้างโซลูชันของพวกเขา นอกจากนี้ นักศึกษา คนจะได้ฝึกฝนทักษะการเป็นพลเมืองดิจิทัลที่จำเป็น เช่น การรักษาความเป็นส่วนตัวของรหัสผ่าน และวิธีใช้แนวคิดของผู้อื่นอย่างเหมาะสม เมื่อพวกเขาทำกิจกรรมในหน่วยนี้เสร็จสิ้น
ผลกระทบของการประมวลผลและพลเมืองดิจิทัล
การพัฒนาเทคโนโลยีใหม่ส่งผลกระทบต่อทุกด้านของชีวิตนักเรียนทั้งในด้านบวกและด้านลบ ความก้าวหน้าต่างๆ เช่น อินเทอร์เน็ต โซเชียลมีเดีย และหุ่นยนต์ เปิดโอกาสมากมายมหาศาลให้กับนักเรียนในการโต้ตอบกับโลกในรูปแบบใหม่ๆ แต่ก็นำมาซึ่งปัญหาทางจริยธรรมใหม่ๆ เช่นกัน สิ่งสำคัญคือการดึงดูดนักเรียนรุ่นเยาว์ให้เข้าร่วมประสบการณ์และการสนทนาที่ทำให้พวกเขาเข้าใจว่าพวกเขาสามารถใช้เทคโนโลยีเพื่อปรับปรุงชีวิตของตนเองได้อย่างไร และทำให้โลกเป็นสถานที่ที่ดีขึ้นสำหรับผู้อื่นที่มีภูมิหลัง ความสามารถ และความต้องการที่แตกต่าง
การประมวลผลแบบรวมเพื่อการแก้ไขปัญหาที่ดีขึ้น
แนวคิดสำคัญประการหนึ่งที่นักเรียนควรศึกษาคือ การผสมผสานความคิดและมุมมองที่หลากหลายเมื่อร่วมมือกันแก้ไขปัญหาจะนำไปสู่การสร้างสรรค์นวัตกรรมที่ดีขึ้น และทำให้ผลลัพธ์แข็งแกร่งยิ่งขึ้น ตัวอย่างเช่น ลองพิจารณาสถานีอวกาศนานาชาติ ซึ่งนักวิทยาศาสตร์และนักบินอวกาศจาก 23 ประเทศร่วมมือกันในโครงการวิจัยต่างๆ มากมาย โครงการเหล่านี้มีประโยชน์ต่อมนุษยชาติโดยการปรับปรุงการรักษาโรคมะเร็ง ช่วยลดความร้อนในเมือง เพิ่มขีดความสามารถของแขนหุ่นยนต์ และอื่นๆ อีกมากมาย
แนวคิดที่เชื่อมโยงกันอย่างใกล้ชิดอีกประการหนึ่งคือแนวคิดที่ว่าการพัฒนาและการปรับปรุงเทคโนโลยีคอมพิวเตอร์นั้นขับเคลื่อนโดยความต้องการของกลุ่มผู้คนที่หลากหลาย ซึ่งหมายความว่าเมื่อนักเรียนเรียนรู้ที่จะใช้เทคโนโลยีเพื่อแก้ปัญหา การพิจารณาถึงมุมมองที่เป็นไปได้ของผู้ใช้ที่มีภูมิหลัง ระดับความสามารถ และทัศนคติที่แตกต่างกันถือเป็นสิ่งสำคัญ เทคโนโลยีการแปลงเสียงเป็นข้อความถือเป็นตัวอย่างที่ใช้กันอย่างแพร่หลายของนวัตกรรมประเภทนี้ สร้างขึ้นครั้งแรกเพื่อช่วยเหลือผู้ที่ประสบปัญหาในการเขียนหรือพิมพ์ด้วยมือ ปัจจุบันมีคนเกือบทุกคนที่ใช้สมาร์ทโฟนและอุปกรณ์อื่นๆ ใช้เทคโนโลยีนี้ ช่วยให้เราขับรถได้ปลอดภัยยิ่งขึ้น และได้รับคำตอบทันทีแม้ว่ามือเราจะว่างก็ตาม
การประมวลผลที่ปลอดภัยและมีจริยธรรม
ในขณะที่นักเรียนของเราเรียนรู้ที่จะเป็นผู้สร้างสรรค์นวัตกรรมแบบครอบคลุม เราก็ต้องแน่ใจด้วยว่าพวกเขากำลังใช้เทคโนโลยีในวิธีที่ปลอดภัยและเหมาะสม พลเมืองดิจิทัลที่ดีจะต้องปฏิบัติตามกฎเกณฑ์ของสังคมในโลกดิจิทัล เช่นเดียวกับในโลกแอนะล็อก เราสอนนักเรียนของเราให้กล่าวคำว่า "โปรด" และ "ขอบคุณ" ไม่ขัดจังหวะผู้อื่น และผลัดกันพูดตั้งแต่อายุยังน้อย การสอนกฎเกณฑ์ของการเป็นพลเมืองดิจิทัลแก่นักเรียน เช่น การรักษารหัสผ่านให้เป็นส่วนตัวอยู่เสมอ และการตรวจสอบให้แน่ใจว่ามีการอนุญาตอย่างถูกต้อง รวมถึงการระบุแหล่งที่มาเมื่อใช้แนวคิดและเนื้อหาของผู้อื่น ถือเป็นสิ่งสำคัญเท่าเทียมกัน
การวางแผนเส้นทางคืออะไร?
การวางแผนเส้นทางคือกระบวนการย่อยโครงการให้เป็นพฤติกรรมของหุ่นยนต์ที่เล็กที่สุดเท่าที่จะเป็นไปได้ ก่อนที่จะเริ่มเขียนโค้ดหุ่นยนต์จริง เป็นวิธีที่มีประสิทธิภาพมากกว่าในการเขียนโค้ดให้หุ่นยนต์ของคุณแก้ไขความท้าทายหรือทำภารกิจให้สำเร็จมากกว่าการเดาและตรวจ
ขั้นตอนในการวางแผนเส้นทางมีดังนี้:
- ระบุหน้าที่ของหุ่นยนต์ – คุณต้องการให้หุ่นยนต์ทำอะไร?
- แบ่งงานนั้นลงเป็นพฤติกรรมที่เล็กที่สุดเท่าที่จะทำได้
- ระบุพฤติกรรมเหล่านั้นเป็นขั้นตอนที่เป็นลายลักษณ์อักษร
- การวาดภาพเส้นทางหรือแสดงการเคลื่อนไหวของหุ่นยนต์อาจเป็นประโยชน์ในกรณีนี้
- พฤติกรรมที่เล็กที่สุดหมายถึงทุกครั้งที่หุ่นยนต์ขับหรือเลี้ยวเป็นระยะทางที่กำหนด ทุกครั้งที่ไฟ LED Bumper กะพริบ เป็นต้น
- แนบบล็อกโค้ดให้กับพฤติกรรมแต่ละอย่างเหล่านี้
VEXcode GO คืออะไร?
VEXcode GO เป็นสภาพแวดล้อมการเขียนโค้ดที่ใช้ในการสื่อสารกับหุ่นยนต์ VEX GO นักศึกษาใช้อินเทอร์เฟซแบบลากและวางเพื่อสร้างโครงการ VEXcode GO เพื่อควบคุมการกระทำของหุ่นยนต์ วัตถุประสงค์ของแต่ละบล็อกสามารถระบุได้โดยใช้สิ่งบ่งชี้ทางภาพ เช่น รูปร่าง สี และป้ายกำกับ สำหรับข้อมูลเพิ่มเติมเกี่ยวกับวิธีการทำงานกับ VEXcode GO โปรดดู ส่วน VEXcode GO ของไลบรารี VEX.
บล็อก VEXcode GO ต่อไปนี้จะถูกใช้ในหน่วยนี้:
| บล็อก VEXcode GO | พฤติกรรม |
|---|---|
 |
บล็อก เมื่อเริ่มต้น จะเริ่มทำงานสแต็กบล็อกที่แนบมาเมื่อเริ่มต้นโครงการ |

|
ไดรฟ์ สำหรับบล็อก จะเคลื่อนระบบส่งกำลังไปข้างหน้าหรือถอยหลังในระยะทางที่กำหนด กำหนดว่าระบบส่งกำลังจะเคลื่อนที่ไปไกลแค่ไหนโดยป้อนค่าลงในรูปวงรี |
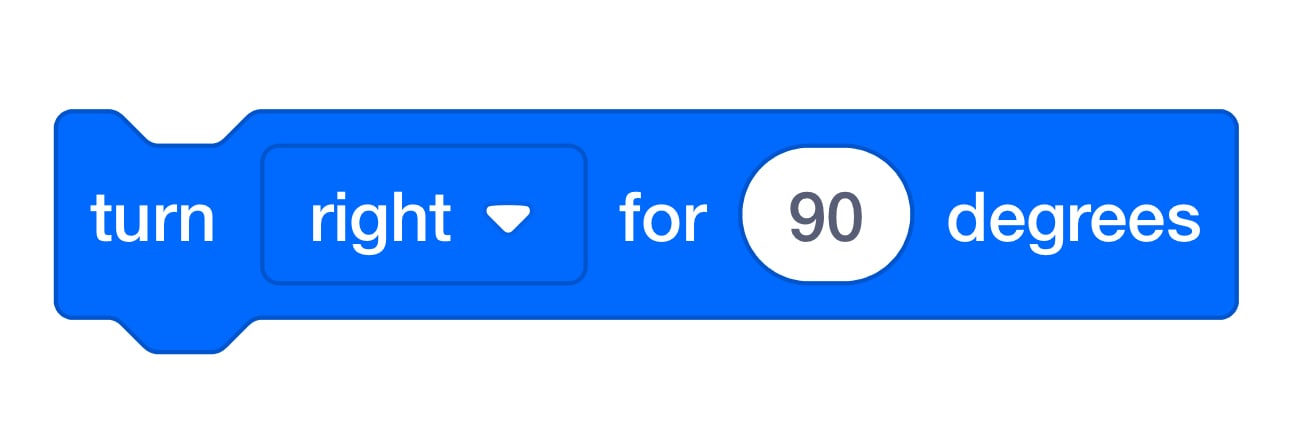 |
บล็อก Turn สำหรับ จะทำการหมุนระบบส่งกำลังเป็นระยะทางที่กำหนด ตั้งค่าว่าระบบส่งกำลังจะหมุนได้ไกลแค่ไหนโดยป้อนค่าลงในรูปวงรี |
 |
บล็อก Wait จะรอเป็นเวลาที่กำหนดก่อนที่จะย้ายไปยังบล็อกถัดไปในโปรเจ็กต์ |
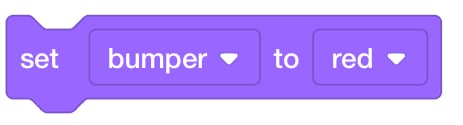 |
บล็อกสีกันชน Set จะกำหนดสีของกันชน LED |
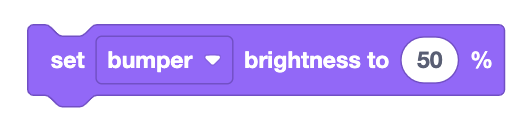 |
The Set bumper brightness block sets the brightness level of the LED Bumper from 0-100%. |
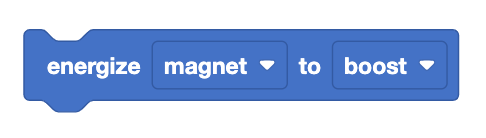 |
บล็อกแม่เหล็กไฟฟ้า Energize ใช้เพื่อตั้งค่าแม่เหล็กให้เพิ่ม (หยิบ) หรือปล่อย (ปล่อย) วัตถุ
|
 |
บล็อก Repeat เป็นบล็อกรูปตัว C ที่ทำให้บล็อกภายในทำซ้ำตามจำนวนครั้งที่กำหนด |