
레슨 3: 보고된 센서 피드백을 사용하여 디스크 픽업
이 수업에서는 보고된 센서 피드백을 사용하여 수업 2와 동일한 과제를 해결합니다. VR 로봇은 첫 번째 파란색 디스크를 집어 파란색 골대로 옮깁니다.
-
VEXcode VR에서 새 프로젝트를 시작하고 프로젝트 이름을 Unit8Lesson3로 지정합니다.

-
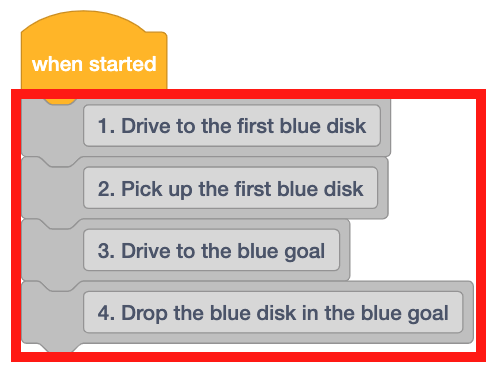
4개의 주석 블록을 작업 공간으로 끌어다 놓습니다. VR 로봇이 첫 번째 디스크까지 운전하고, 디스크를 집어 들고, 파란색 목표로 돌려놓는 데 필요한 각 단계에 대한 주석을 추가하세요.
-
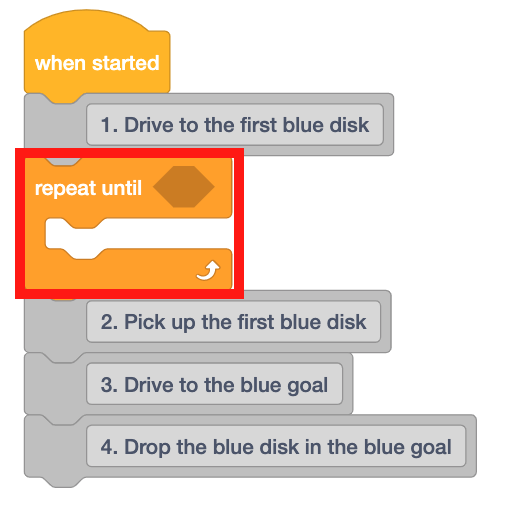
첫 번째 주석 아래의 작업 공간으로 [반복] 블록을 끌어다 놓습니다.
귀하의 정보를 위해
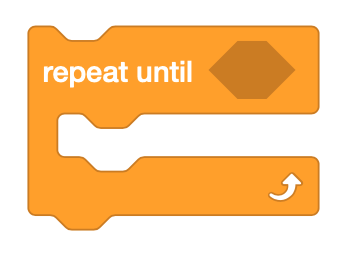
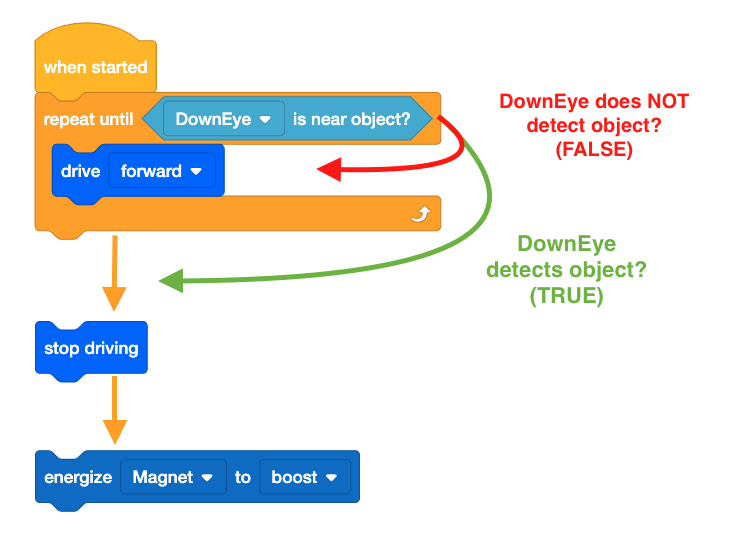
[반복] 블록은 부울 리포터 블록을 허용하는 C 블록입니다. [반복할 때까지] 블록은 각 루프의 시작 부분에서만 부울 조건을 확인합니다. 부울 조건이 FALSE로 보고되면 내부 블록이 실행됩니다. 부울 조건이 TRUE로 보고되면 내부 블록은 건너뜁니다.
-
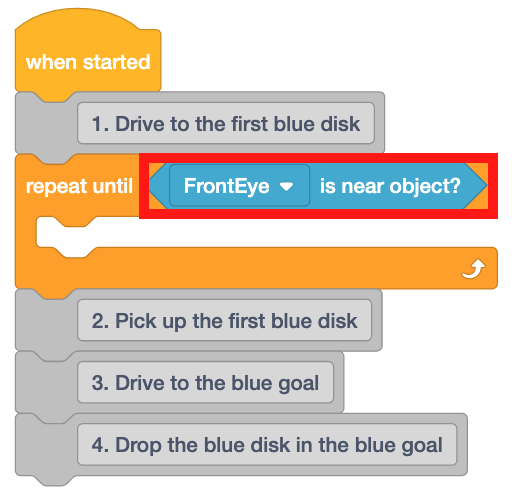
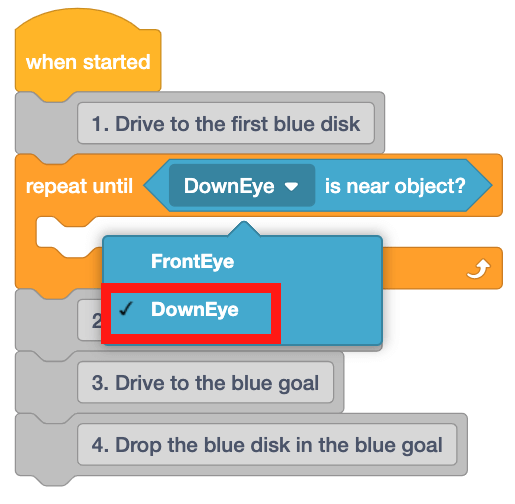
VR 로봇이 Disk Mover Playground에서 색상이 있는 디스크를 감지하면 <Eye Sensor near object> 블록이 TRUE를 보고합니다. 이 블록을 프로젝트로 끌어다 놓으세요.
-
디스크 무버 플레이그라운드 의 디스크는 플레이그라운드 바닥에 있기 때문에 프런트 아이 센서로 감지할 수 없습니다. 이러한 이유로 <Eye Sensor near object> 블록을 'DownEye'로 설정합니다.
-
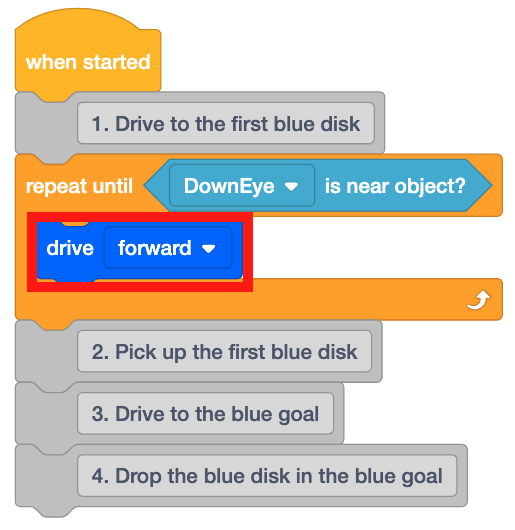
[반복] 블록 내부의 블록은 VR 로봇이 객체를 감지하지 못할 때 실행됩니다. 디스크 중 하나에 도달하려면 VR 로봇이 디스크가 감지될 때까지 앞으로 주행해야 합니다.

-
[드라이브] 블록을 [반복 대상] 블록으로 끌어다 놓습니다.
-
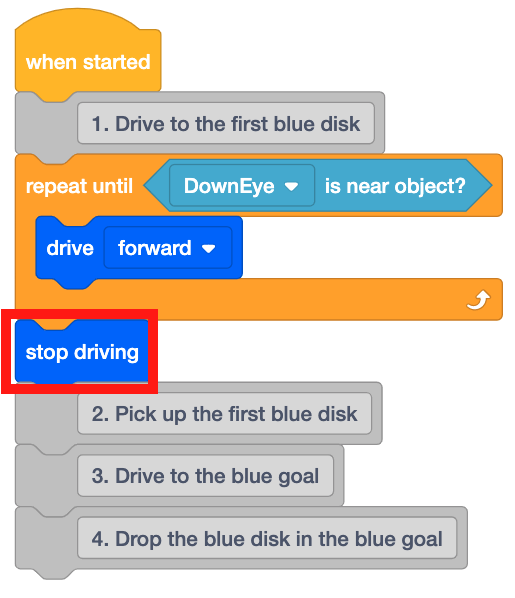
디스크가 감지되면 VR 로봇은 운전을 멈추고 디스크를 집어 올려야 합니다. [운전 중지] 블록을 끌어서 [반복] 블록 아래에 놓습니다.
-
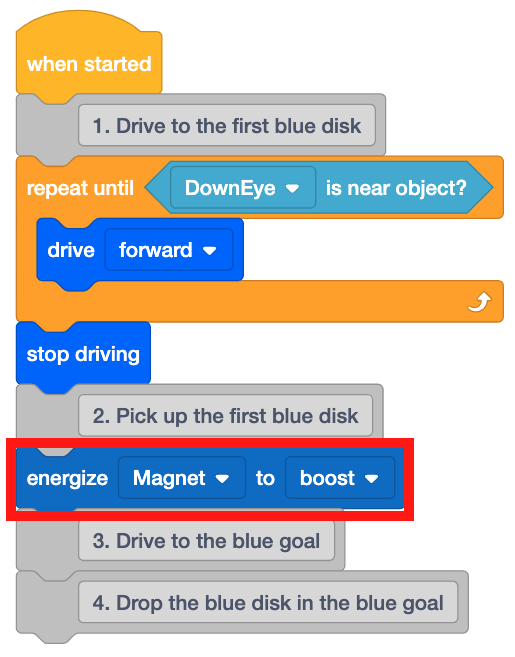
이제 VR 로봇에게 전자석이 있는 디스크를 집어 올리도록 지시하여 두 번째 주석 아래에 [전자석 활성화] 블록을 놓습니다.
- 아직 열려 있지 않으면 Disk Mover Playground 을 열고 프로젝트를 실행합니다.
-
VR 로봇은 다운 아이 센서에 의해 첫 번째 파란색 디스크가 감지될 때까지 앞으로 주행하고, 감지되면 주행을 멈추고 전자석에 전원을 공급하여 디스크를 집어 올립니다.

- 이 프로젝트에서 [반복] 블록이 어떻게 작동하는지 주목하세요.
- VR 로봇의 다운 아이 센서가 물체를 감지하면 프로젝트는 [반복] 블록 아래에 있는 스택의 다음 블록으로 이동합니다.
- 이 프로젝트에서는 VR 로봇이 운전을 멈추고 전자석에 전원을 공급한다는 의미입니다.
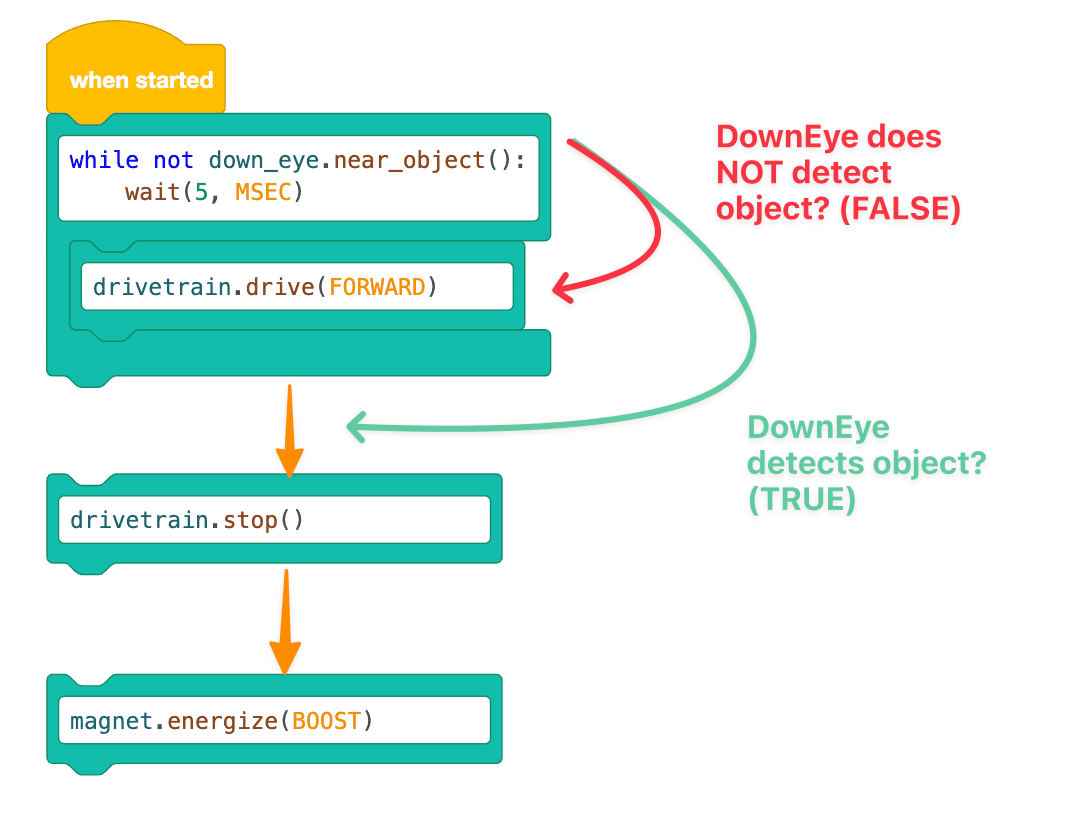
스위치 블록 사용
아래 이미지는 스위치 블록을 사용한 이 수업의 워크플로 그래픽을 보여줍니다. 이 그래픽을 위의 그래픽과 비교하면 현재 배우고 있는 새로운 Switch Python 명령의 워크플로를 더 잘 이해하는 데 도움이 될 수 있습니다.
이 강의의 나머지 부분을 계속하려면 다음 버튼을 선택하세요.