
പാഠം 3: ഡിസ്കുകൾ എടുക്കാൻ റിപ്പോർട്ട് ചെയ്ത സെൻസർ ഫീഡ്ബാക്ക് ഉപയോഗിക്കുന്നു
പാഠം 2 ലെ അതേ വെല്ലുവിളി പരിഹരിക്കാൻ ഈ പാഠം റിപ്പോർട്ട് ചെയ്ത സെൻസർ ഫീഡ്ബാക്ക് ഉപയോഗിക്കും. വിആർ റോബോട്ട് ആദ്യത്തെ നീല ഡിസ്ക് എടുത്ത് നീല ഗോളിലേക്ക് നീക്കും.
-
VEXcode VR-ൽ ഒരു പുതിയ പ്രോജക്റ്റ് ആരംഭിച്ച് പ്രോജക്റ്റിന് എന്ന് പേരിടുക Unit8Lesson3.

-
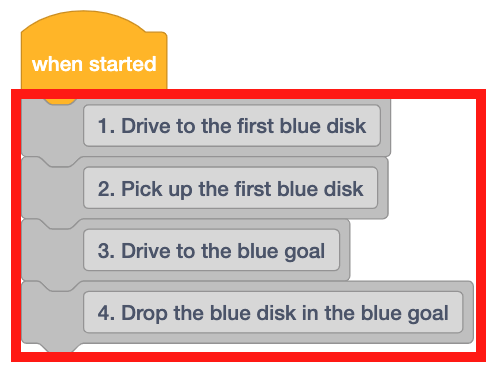
വർക്ക്സ്പെയ്സിലേക്ക് നാല് കമന്റ് ബ്ലോക്കുകൾ വലിച്ചിടുക. VR റോബോട്ട് ആദ്യത്തെ ഡിസ്കിലേക്ക് ഡ്രൈവ് ചെയ്യുന്നതിനും, അത് എടുക്കുന്നതിനും, നീല ഗോളിലേക്ക് തിരികെ കൊണ്ടുവരുന്നതിനും ആവശ്യമായ ഓരോ ഘട്ടത്തിനും അഭിപ്രായങ്ങൾ ചേർക്കുക.
-
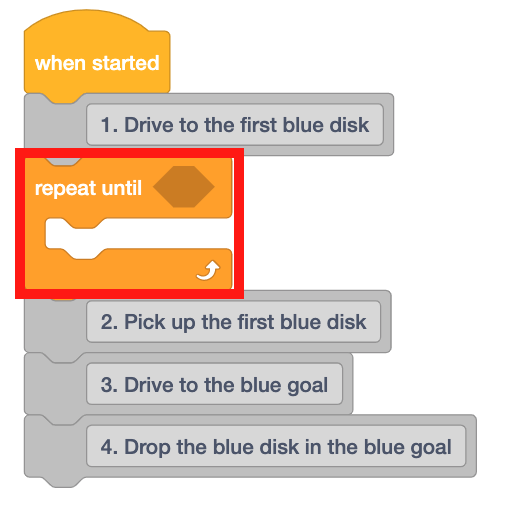
ആദ്യ കമന്റിന് താഴെയുള്ള വർക്ക്സ്പെയ്സിലേക്ക് [Repeat until] ബ്ലോക്ക് വലിച്ചിടുക.
നിങ്ങളുടെ അറിവിലേക്കായി
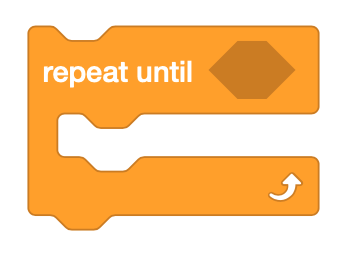
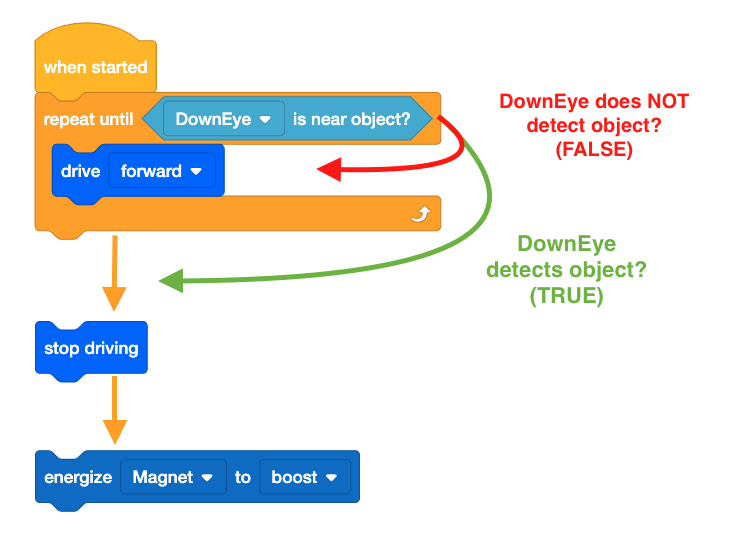
[Repeat until] ബ്ലോക്ക് ബൂളിയൻ റിപ്പോർട്ടർ ബ്ലോക്കുകൾ സ്വീകരിക്കുന്ന ഒരു C ബ്ലോക്കാണ്. [Repeat until] ബ്ലോക്ക് ഓരോ ലൂപ്പിന്റെയും തുടക്കത്തിൽ ബൂളിയൻ അവസ്ഥ മാത്രമേ പരിശോധിക്കൂ. ബൂളിയൻ അവസ്ഥ FALSE ആയി റിപ്പോർട്ട് ചെയ്താൽ, ഉള്ളിലെ ബ്ലോക്കുകൾ പ്രവർത്തിക്കും. ബൂളിയൻ അവസ്ഥ TRUE ആയി റിപ്പോർട്ട് ചെയ്താൽ, ഉള്ളിലെ ബ്ലോക്കുകൾ ഒഴിവാക്കപ്പെടും.
-
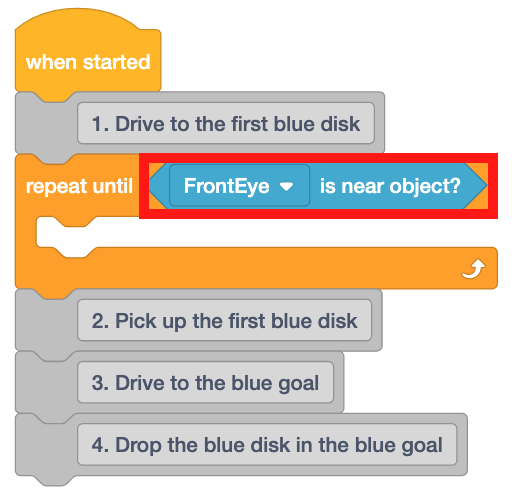
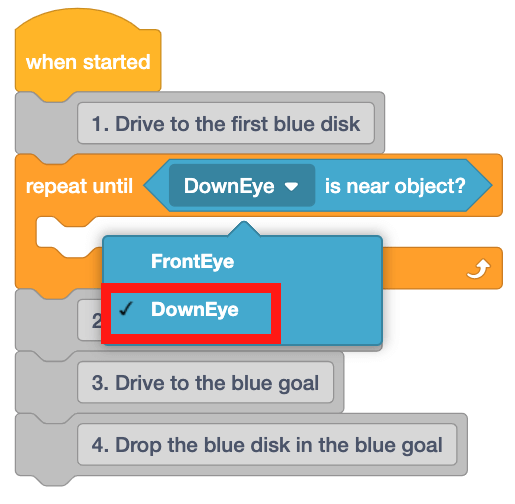
ഡിസ്ക് മൂവർ പ്ലേഗ്രൗണ്ട്ൽ VR റോബോട്ട് ഒരു നിറമുള്ള ഡിസ്ക് കണ്ടെത്തുമ്പോൾ <Eye Sensor near object> ബ്ലോക്ക് TRUE എന്ന് റിപ്പോർട്ട് ചെയ്യുന്നു. ഈ ബ്ലോക്ക് പ്രോജക്റ്റിലേക്ക് വലിച്ചിടുക.
-
ഡിസ്ക് മൂവർ പ്ലേഗ്രൗണ്ട് ലെ ഡിസ്കുകൾ പ്ലേഗ്രൗണ്ടിന്റെ തറയിലാണ്, ഫ്രണ്ട് ഐ സെൻസറിന് അവ കണ്ടെത്താൻ കഴിയില്ല. ഇക്കാരണത്താൽ, <Eye Sensor near object> ബ്ലോക്ക് 'DownEye' ആയി സജ്ജമാക്കുക.
-
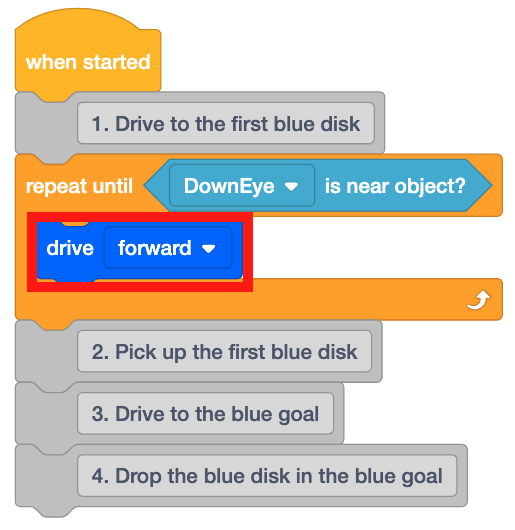
VR റോബോട്ട് ഒരു വസ്തുവിനെ കണ്ടെത്താത്തപ്പോൾ [Repeat until] ബ്ലോക്കിന്റെ ഉള്ളിലുള്ള ബ്ലോക്കുകൾ പ്രവർത്തിക്കും. ഡിസ്കുകളിൽ ഒന്നിൽ എത്താൻ, ഡിസ്ക് കണ്ടെത്തുന്നതുവരെ VR റോബോട്ട് മുന്നോട്ട് പോകേണ്ടതുണ്ട്.

-
[Repeat until] ബ്ലോക്കിലേക്ക് ഒരു [Drive] ബ്ലോക്ക് വലിച്ചിടുക.
-
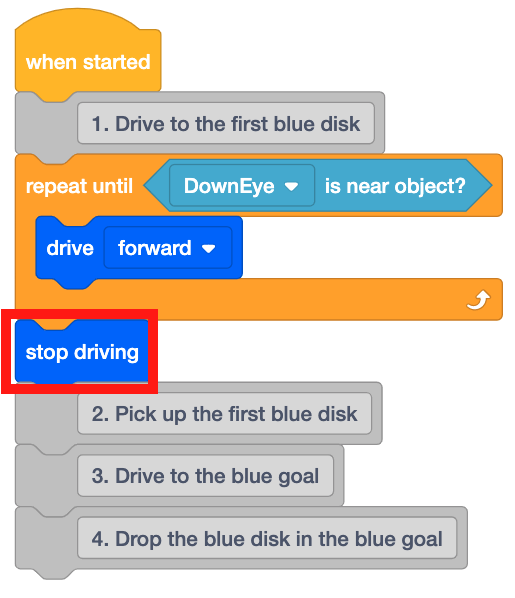
ഒരു ഡിസ്ക് കണ്ടെത്തുമ്പോൾ, അത് എടുക്കാൻ VR റോബോട്ട് ഡ്രൈവിംഗ് നിർത്തേണ്ടതുണ്ട്. ഒരു [സ്റ്റോപ്പ് ഡ്രൈവിംഗ്] ബ്ലോക്ക് വലിച്ചിട്ട് [Repeat until] ബ്ലോക്കിന് താഴെ വയ്ക്കുക.
-
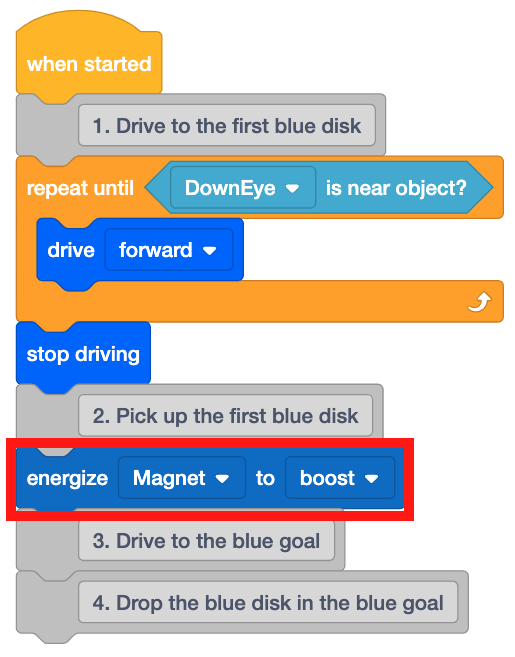
ഇനി, രണ്ടാമത്തെ കമന്റിന് താഴെ ഒരു [Energize Electromagnet] ബ്ലോക്ക് സ്ഥാപിച്ച്, ഇലക്ട്രോമാഗ്നറ്റ് ഉള്ള ഡിസ്ക് എടുക്കാൻ VR റോബോട്ടിനോട് നിർദ്ദേശിക്കുക.
- ഡിസ്ക് മൂവർ പ്ലേഗ്രൗണ്ട് തുറന്നിട്ടില്ലെങ്കിൽ അത് തുറന്ന് പ്രോജക്റ്റ് പ്രവർത്തിപ്പിക്കുക.
-
ഡൗൺ ഐ സെൻസർ ആദ്യത്തെ നീല ഡിസ്ക് കണ്ടെത്തുന്നതുവരെ വിആർ റോബോട്ട് മുന്നോട്ട് ഓടുന്നു, ഡ്രൈവിംഗ് നിർത്തുന്നു, ഡിസ്ക് എടുക്കാൻ ഇലക്ട്രോമാഗ്നറ്റിനെ ഊർജ്ജസ്വലമാക്കുന്നു.

- ഈ പ്രോജക്റ്റിൽ [Repeat until] ബ്ലോക്ക് എങ്ങനെ പ്രവർത്തിക്കുന്നുവെന്ന് ശ്രദ്ധിക്കുക.
- VR റോബോട്ടിലെ ഡൗൺ ഐ സെൻസർ ഒരു വസ്തുവിനെ കണ്ടെത്തിക്കഴിഞ്ഞാൽ, പ്രോജക്റ്റ് [Repeat until] ബ്ലോക്കിന് താഴെയുള്ള സ്റ്റാക്കിലെ അടുത്ത ബ്ലോക്കിലേക്ക് നീങ്ങുന്നു.
- ഈ പ്രോജക്റ്റിൽ, വിആർ റോബോട്ട് ഡ്രൈവിംഗ് നിർത്തി ഇലക്ട്രോമാഗ്നറ്റിനെ ഊർജ്ജസ്വലമാക്കി എന്നാണ് ഇതിനർത്ഥം.
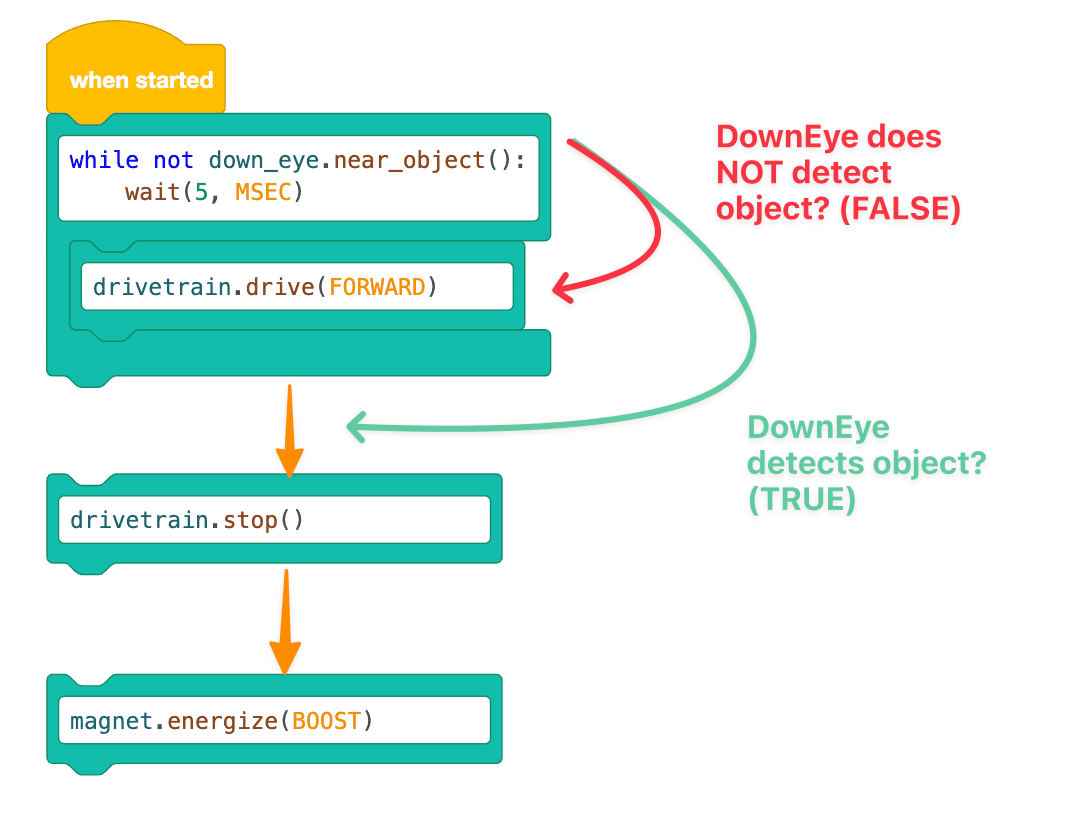
സ്വിച്ച് ബ്ലോക്കുകൾ ഉപയോഗിക്കുന്നു
താഴെയുള്ള ചിത്രം സ്വിച്ച് ബ്ലോക്കുകൾ ഉപയോഗിച്ചുള്ള ഈ പാഠത്തിന്റെ വർക്ക്ഫ്ലോ ഗ്രാഫിക് പ്രദർശിപ്പിക്കുന്നു. മുകളിലുള്ള ഗ്രാഫിക്കുമായി ഈ ഗ്രാഫിക് താരതമ്യം ചെയ്യുന്നത് നിങ്ങൾ പഠിക്കുന്ന പുതിയ സ്വിച്ച് പൈത്തൺ കമാൻഡുകളുടെ വർക്ക്ഫ്ലോ നന്നായി മനസ്സിലാക്കാൻ സഹായിക്കും.
ഈ പാഠത്തിന്റെ ബാക്കി ഭാഗം തുടരാൻ അടുത്തത് ബട്ടൺ തിരഞ്ഞെടുക്കുക.