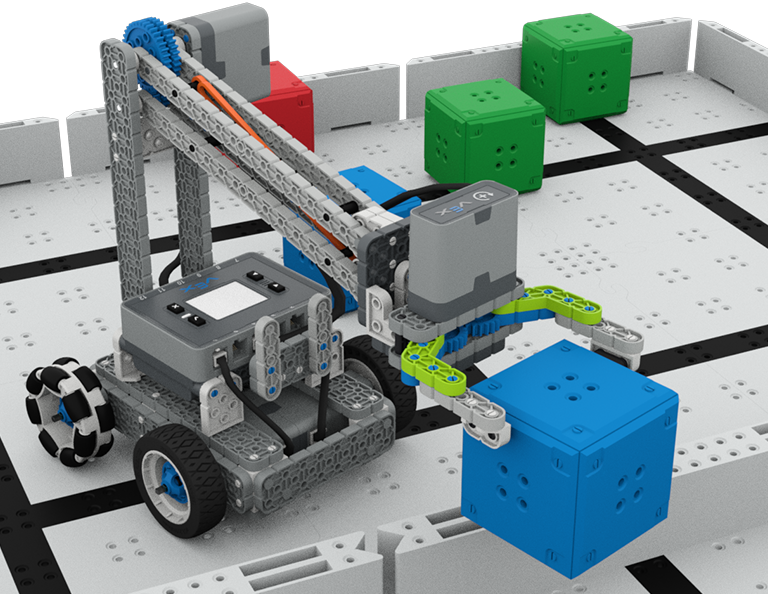
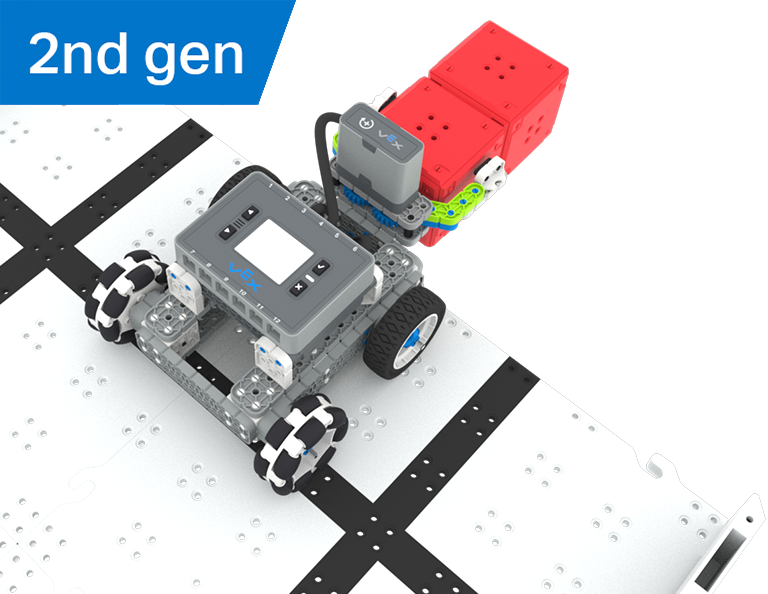
Op en neer
6 Lessen
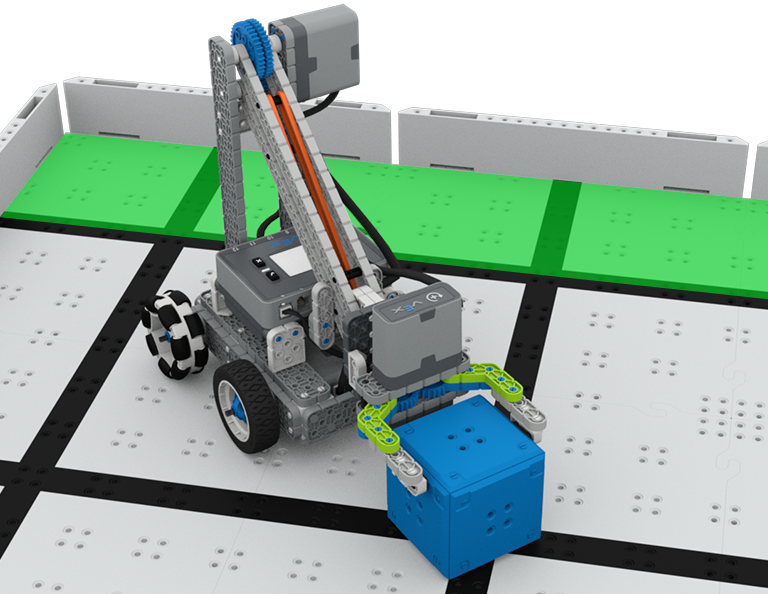
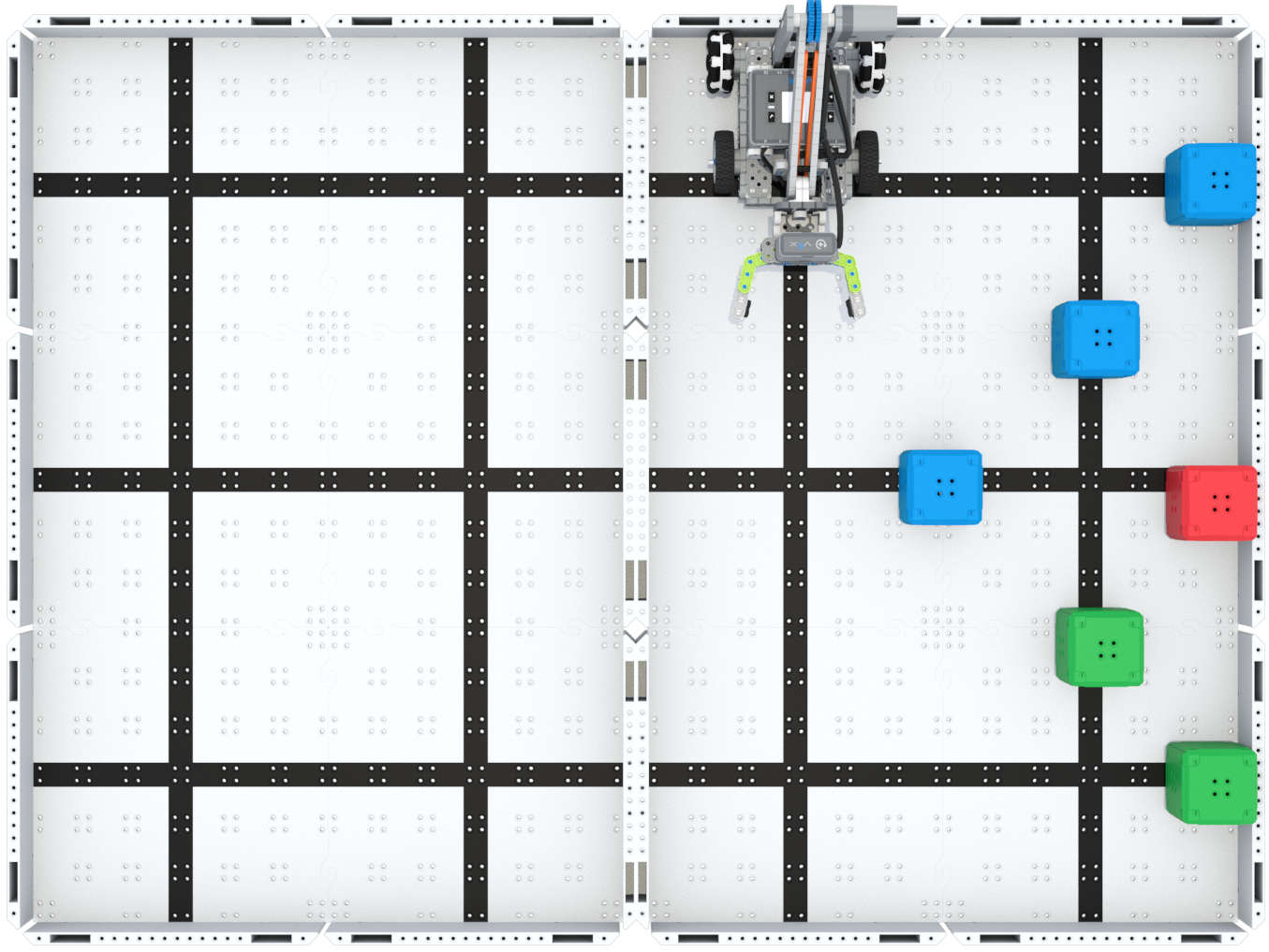
In deze Unit onderzoek je hoe je een Clawbot kunt ontwerpen om kubussen te verzamelen, op te pakken en van de ene kant van het veld naar de andere te verplaatsen in de Up and Over-competitie!
Bezoek het docentenportaal voor ondersteuningsmateriaal voor docenten en video's over de inhoud en het faciliteren van de Up and Over-lessen.

Lesson 1: Introduction
In this Lesson, you will be introduced to the Up and Over competition, set up the Battery and Controller, get ready to code, and build the Clawbot.
Lesson 2: Claw Design
In this Lesson, you will learn what a claw is, how an effective claw works, and how scouting can benefit your team's designs and strategy. Then, you will apply what you have learned in the Grab and Go challenge.
Lesson 3: Arm Designs
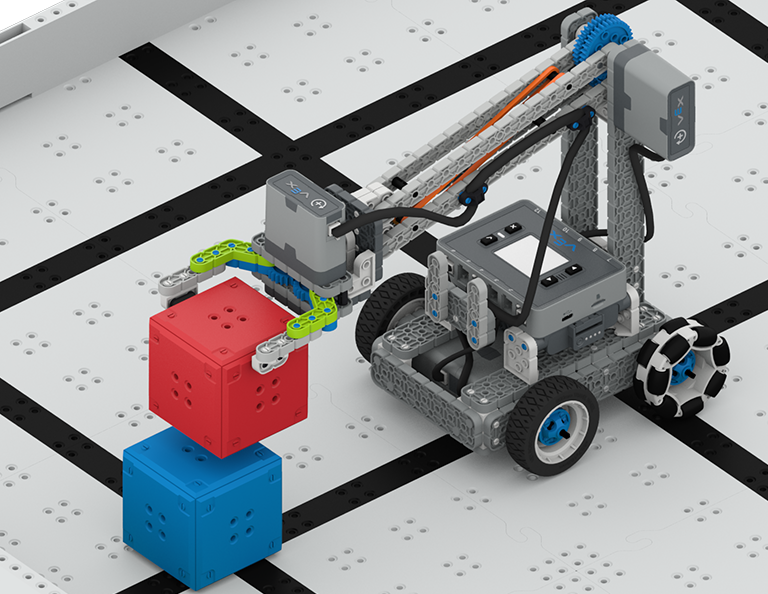
In this Lesson, you will learn about different elements of robotic arms, how they work, and what makes an effective arm design, in order to stack as many cubes as you can within a minute in the Stacked Up challenge.
Lesson 4: Motor Groups
In this Lesson, you will learn what motor groups are, how they can be helpful, and how to configure motor groups in VEXcode IQ in order to iterate on your robot to complete the Up and Over challenge.
Lesson 5: Up and Over Competition
In this Lesson, you will apply your learning from the previous Lessons to compete in the Up and Over competition!

Lesson 6: Conclusion
In this Lesson, you will reflect on the Unit and identify connections between what you have done and a STEM career.
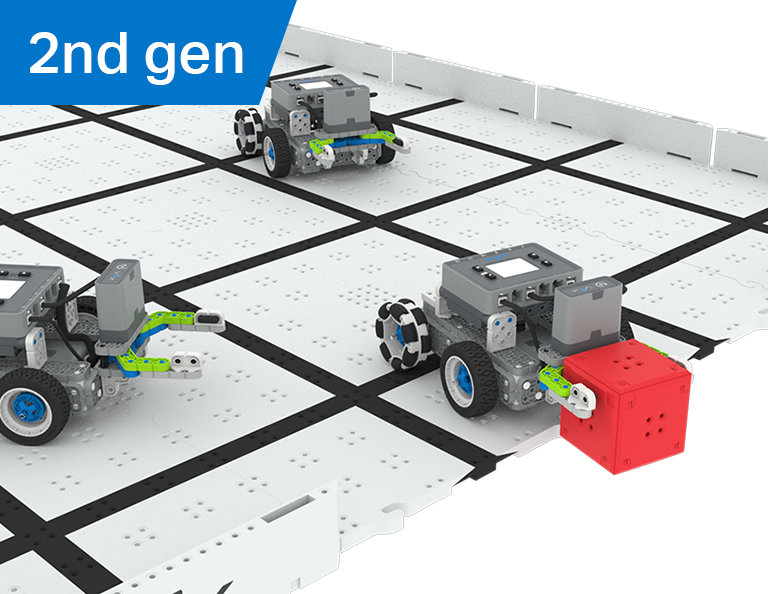
Robotvoetbal
4 Lessen
In deze unit onderzoek je hoe je een manipulator op je robot kunt maken om als robotvoetballer de meeste doelpunten te pakken, te passen en te scoren in de Robot Soccer-competitie!
Bezoek het docentenportaal voor ondersteunend materiaal voor docenten en video's over de inhoud en het faciliteren van de robotvoetballessen.
Les 1: Inleiding
In deze les bouw je de Simple Clawbot, laad je je controller en batterij op en maak je je klaar om te coderen.
Les 2: Manipulatoren
In deze les leer je over passieve en actieve manipulatoren en inlaatontwerp, om je robotontwerp te herhalen en te strijden in een één-op-één robotvoetbaluitdaging!
Les 3: Robotvoetbalcompetitie
In deze les pas je het geleerde uit de vorige les toe om deel te nemen aan de robotvoetbalcompetitie!
Les 4: Conclusie
In deze les reflecteer je op de eenheid en identificeer je verbanden tussen wat je hebt gedaan en een verbonden STEM-carrière.

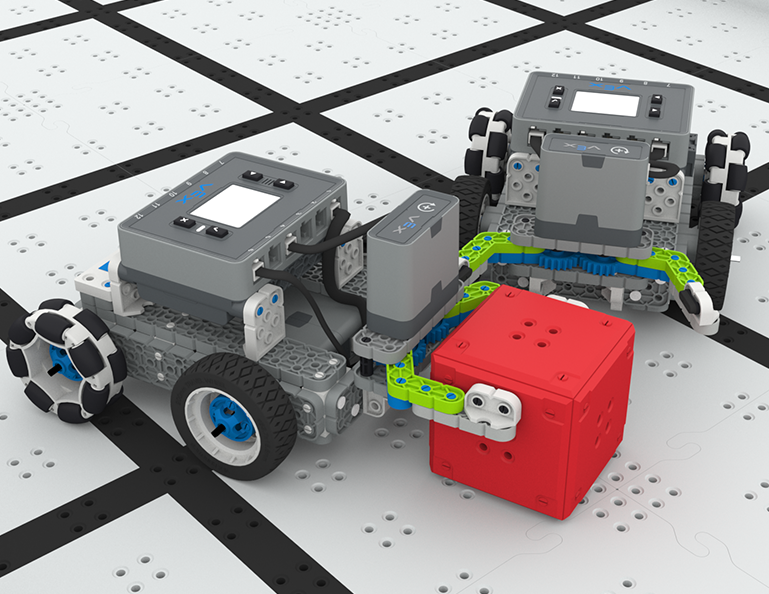
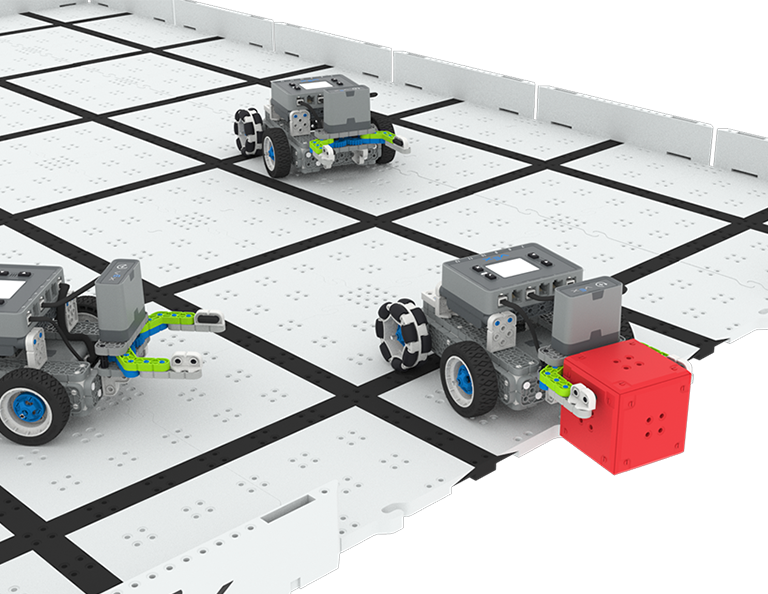
Kubusverzamelaar
6 Lessen
In deze unit onderzoek je het verschil tussen bestuurdersbesturing en autonome uitdagingen, terwijl je leert de Clawbot te besturen en te coderen om kubussen te sorteren en te stapelen in de Cube Collector-competitie!
Bezoek het docentenportaal voor ondersteunend materiaal voor docenten en video's over de inhoud en het faciliteren van de Cube Collector-lessen.
Lesson 1: Introduction
In this Lesson, you will be introduced to the Cube Collector competition, build the Clawbot, and get ready to code.

Lesson 2: Driver Control
In this Lesson, you will learn about using the Driver Control program on the IQ Brain so that you can drive the Clawbot to stack and score cubes on the Field and participate in the Speed Stack Challenge.

Lesson 3: Coding for Autonomous Movements
In this Lesson, you will learn about coding your robot for autonomous movements, including how to plan the path of your robot. Then, you will create a VEXcode IQ project to score and stack cubes in the Coding for Cubes autonomous challenge.

Lesson 4: Using Multiple Programs (Autonomous & Driver)
In this Lesson, you will learn about customizing driver controls and how you can use the Controller and VEXcode IQ to optimize your driver strategy for competing in a challenge with driver control and autonomous runs.

Lesson 5: Cube Collector Competition
In this Lesson, you will apply your learning from the previous Lessons to compete in the Cube Collector competition!

Lesson 6: Conclusion
In this Lesson, you will reflect on the Unit and identify connections between what you have done and a related STEM career.

Kasteelcrasher
6 Lessen
In deze unit ontdek je hoe je de optische en afstandssensoren kunt gebruiken om kubuskastelen te zoeken, te laten neerstorten en te ontruimen om punten te scoren in de Castle Crasher-competitie!
Bezoek het docentenportaal voor ondersteuningsmateriaal voor docenten en video's over de inhoud en het faciliteren van de Castle Crasher-lessen.

Lesson 1: Introduction
In this Lesson, you will be introduced to the Castle Crasher Competition, build the BaseBot, and get ready to code.

Lesson 2: Castle Crasher No Sensors
In this Lesson, you will learn about calculating angles and changing the velocity of your robot so that you can compete in the Tower Over Challenge.

Lesson 3: Castle Crasher + Distance Sensor
In this Lesson you will learn about what the Distance Sensor is and how it can be used on your robot. You will also learn about the [Wait until] block and how it can be used in a VEXcode IQ project. Then you will apply what you have learned to compete in the Cube Crasher Challenge!

Lesson 4: Creating Algorithms
In this Lesson, you will learn about the Optical Sensor, and about how to create an algorithm that uses sensor feedback. Then you will code your robot to autonomously find cubes and push them off the Field in the Sweep the Field Challenge.

Lesson 5: Castle Crasher Competition
In this Lesson you will apply your learning from the previous Lessons to compete in a Castle Crasher competition!
Lesson 6: Conclusion
In this Lesson, you will reflect on the Unit and identify connections between what you have done and a STEM career.
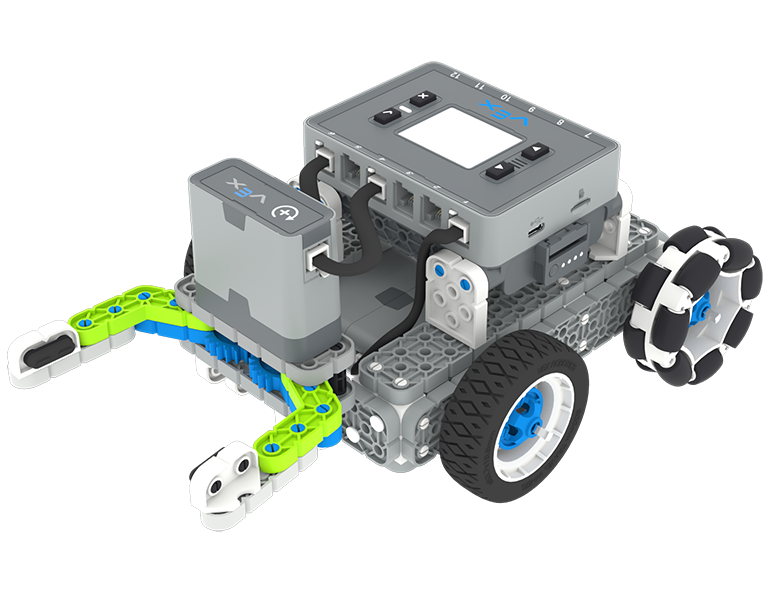
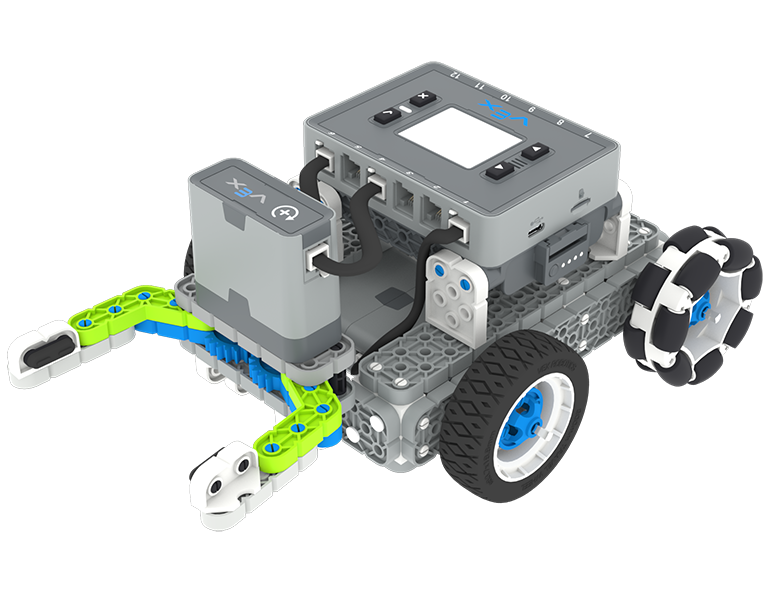
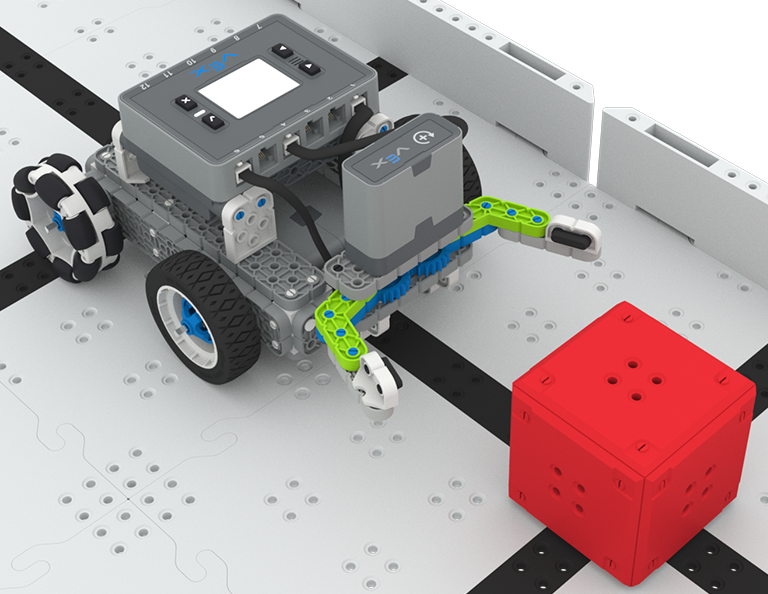
Schattenjacht
5 Lessen
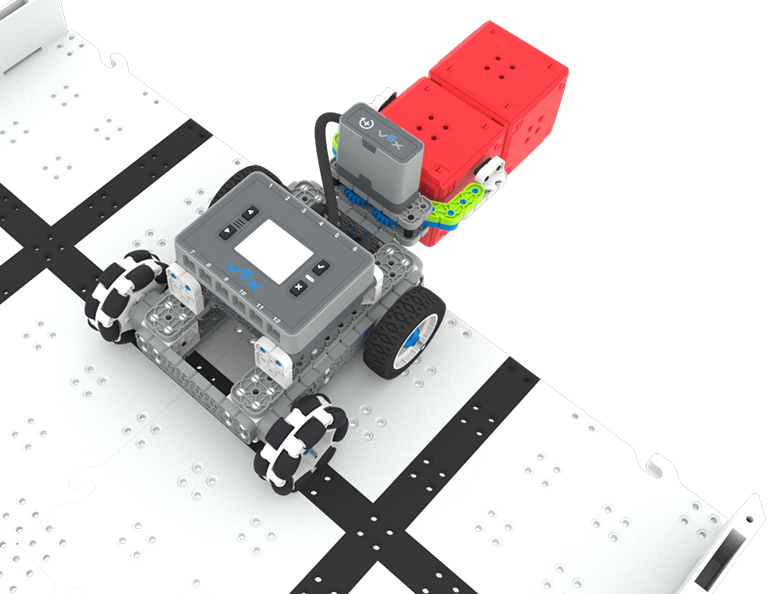
In deze unit bouw en codeer je de Simple Clawbot met de optische sensor om rode blokjes te herkennen en te verzamelen om mee te doen aan de Treasure Hunt-competitie!
Bezoek het docentenportaal voor ondersteunend materiaal voor docenten en video's over de inhoud en het faciliteren van de schattenjachtlessen.
Lesson 1: Introduction
You will be introduced to the Treasure Hunt competition, build the Simple Clawbot, and get ready to code.
Lesson 2: Claw No Sensor
In this Lesson, you will learn about using Drivetrain and Motion blocks in VEXcode IQ to code your Simple Clawbot to collect and move cubes in the Clawbot Collector challenge.
Lesson 3: Claw With Sensor
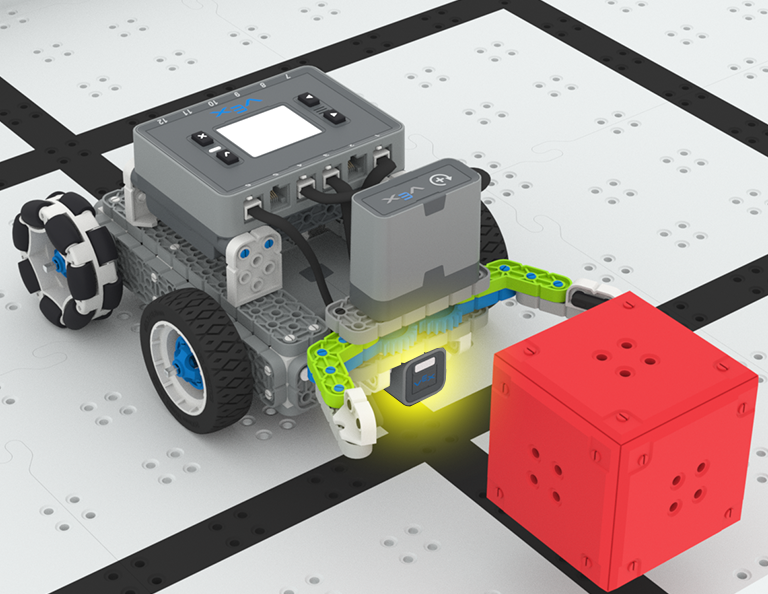
In this Lesson, you will learn about coding the Optical Sensor in order to detect, collect, and move a red cube in the Treasure Mover challenge!
Lesson 4: Treasure Hunt Competition
In this Lesson you will apply your learning from the previous Lessons to compete in a Treasure Hunt competition!
Lesson 5: Conclusion
In this Lesson, you will reflect on the Unit and identify connections between what you have done and a STEM career.
Touwtrekken
6 Lessen
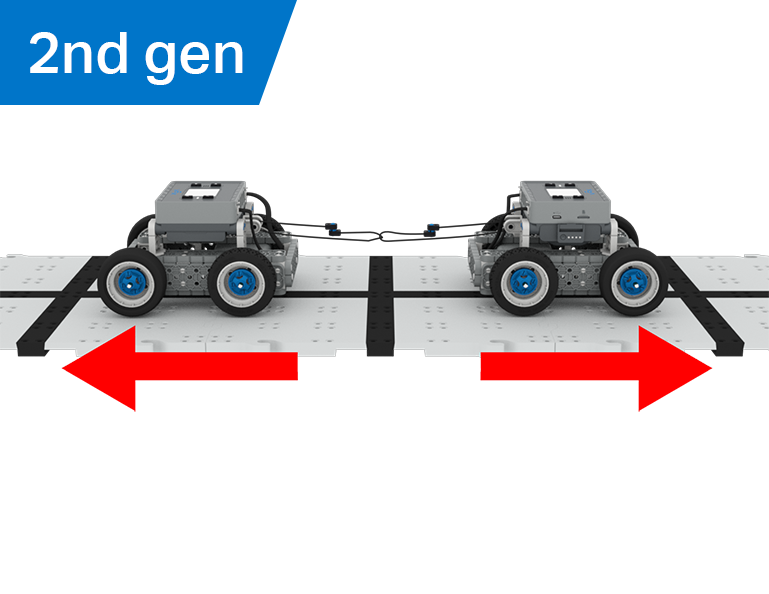
In deze eenheid onderzoek je hoe mechanisch voordeel en zwaartepunt het vermogen van de BaseBot om objecten te trekken beïnvloeden, en ontwerp je de beste robot voor het spel Tug of War!
Bezoek het docentenportaal voor ondersteunend materiaal voor docenten en video's over de inhoud en het faciliteren van de touwtreklessen.
Lesson 1: Introduction
In this Lesson, you will be introduced to the Tug of War competition and build the BaseBot.
Lesson 2: Pulling Objects with the BaseBot
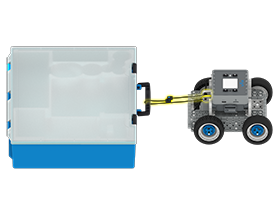
In this Lesson, you will design a rope attachment to practice pulling objects with your BaseBot. Then you will compete in a Robot Tractor Pull challenge.

Lesson 3: Using a Gear Train
In this Lesson, you will add a gear train to your BaseBot to explore how different gear configurations affect your robot's ability to pull an object. Then you will compete in a Gear Train Tractor Pull challenge.
Lesson 4: Adding Mass
In this Lesson, you will add mass to your BaseBot to explore how changing the center of mass affects your robot's ability to pull an object. Then you will compete in a Tug of War challenge.
Lesson 5: Tug of War Competition
In this Lesson, you will apply your learning from the previous Lessons to compete in a Tug of War competition!
Lesson 6: Conclusion
In this Lesson, you will reflect on your learning in this Unit and identify connections between what you have done and a STEM career.
STEM LabsVEX 123
Kalmeer Robot
2 Laboratoria
Programmeer je 123-robot om gedragingen uit te voeren die verband houden met verschillende gevoelens, en maak een kalmeringscode die jij en je 123-robot samen kunnen doen!


Team Freeze-tag
6 Lessen
In deze eenheid bestuur je de BaseBot met behulp van de IQ-controller, kies je wielen en voeg je sensoren toe om deel te nemen aan de Team Freeze Tag-competitie!
Bezoek het docentenportaal voor ondersteunend materiaal voor docenten en video's over de inhoud en het faciliteren van de Team Freeze Tag-lessen.
Lesson 1: Introduction
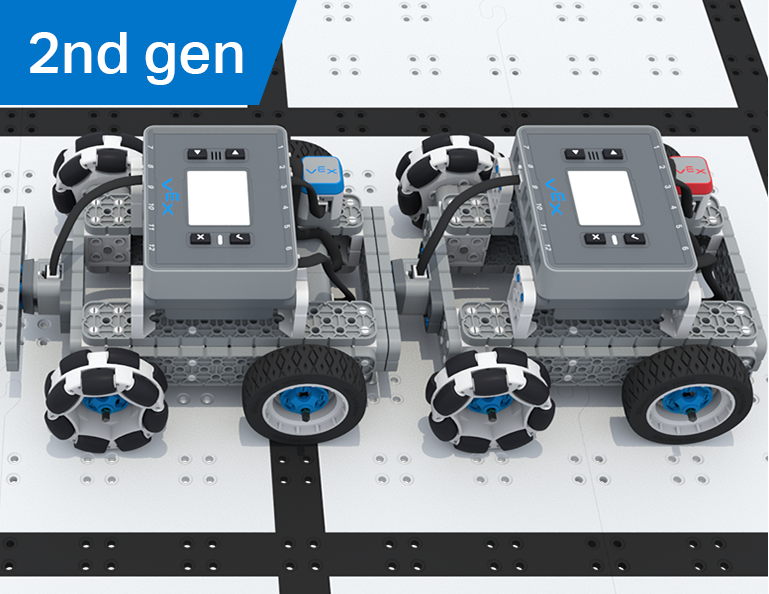
In this Lesson, you will be introduced to the Team Freeze Tag competition, set up the Battery and Controller, and build the BaseBot.
Lesson 2: Driving with the IQ Controller
In this Lesson, you will learn how to drive the BaseBot using the IQ Controller and practice your driving to compete in a challenge activity as you drive in a figure eight!
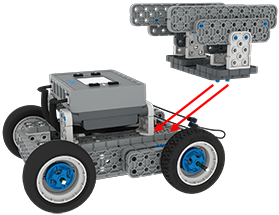
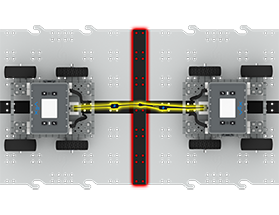
Lesson 3: Changing the Wheels
In this Lesson, you will learn how to change the wheels of the BaseBot, and experiment with different wheel combinations to improve the robot's ability to play Tag.

Lesson 4: Adding the Bumper Switch and Touch LED
In this Lesson, you will add a Bumper Switch and Touch LED to your BaseBot and compete in 1-on-1 Freeze Tag!
Lesson 5: Team Freeze Tag Competition
In this Lesson, you will combine all the skills learned in previous Lessons to play a game of Team Freeze Tag!
Lesson 6: Conclusion
In this Lesson, you will reflect on the Unit and identify connections between what you have done and a STEM career.