STEM LabsVEX 123

Van Touch naar Coder
2 Laboratoria
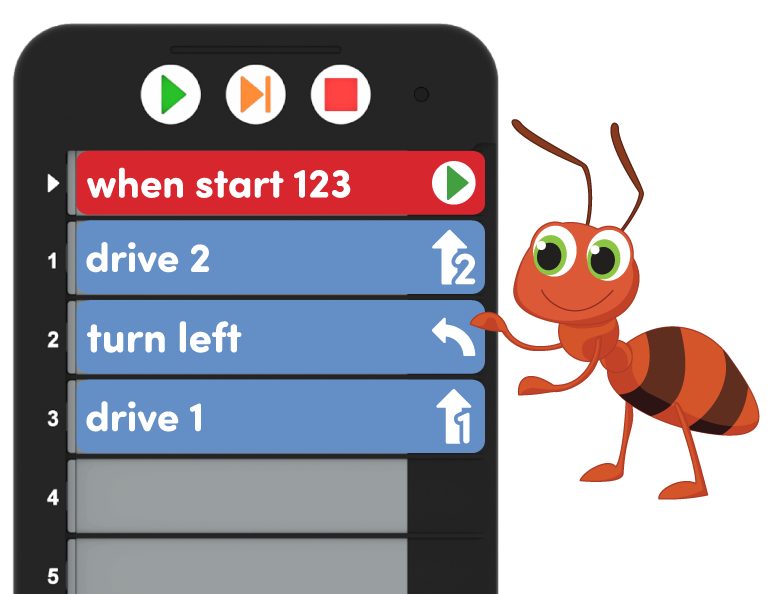
Gebruik je kennis over het coderen met aanraakknoppen om te leren hoe je de 123 Robot kunt coderen met behulp van de Coder en Coder-kaarten.


STEM LabsVEX 123
Vind de bug
2 Laboratoria
Bugs in onze code helpen ons leren! Oefen met een debugproces om bugs in projecten te identificeren, vinden en verhelpen, zodat Robot 123 op de gewenste manier kan bewegen.
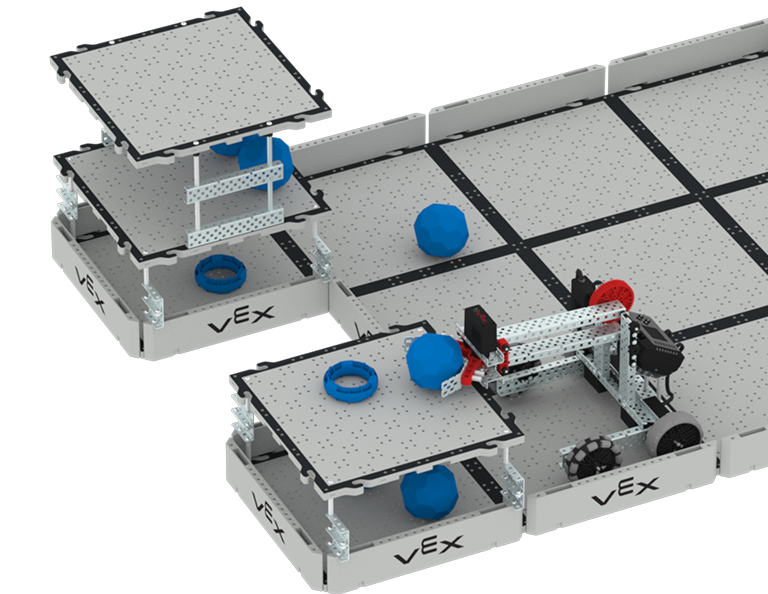
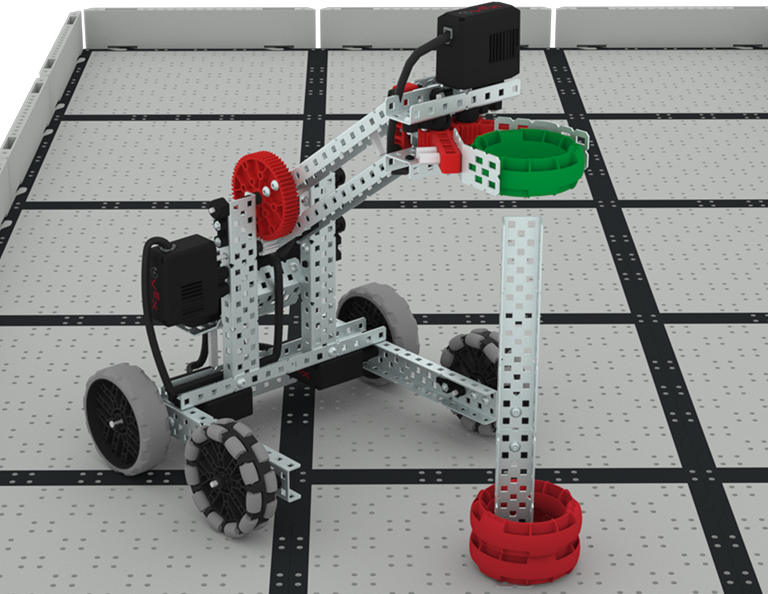
Platformplaatser
6 Lessen
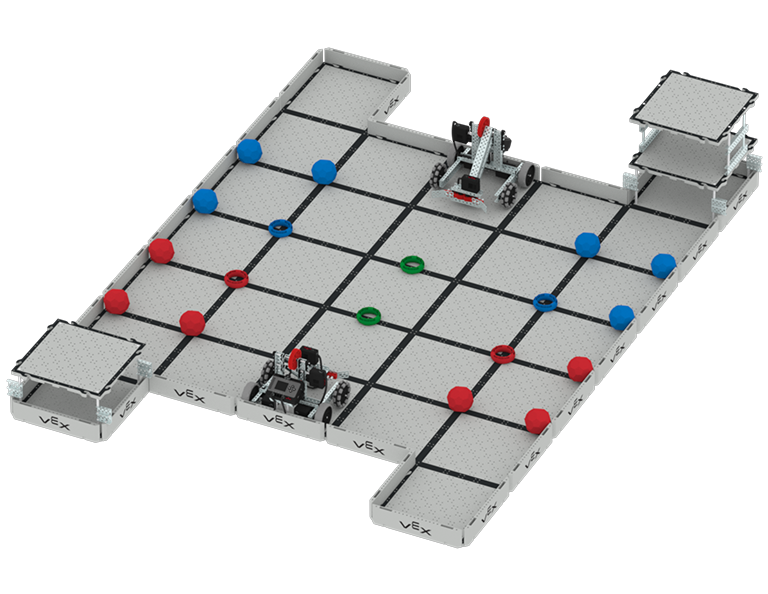
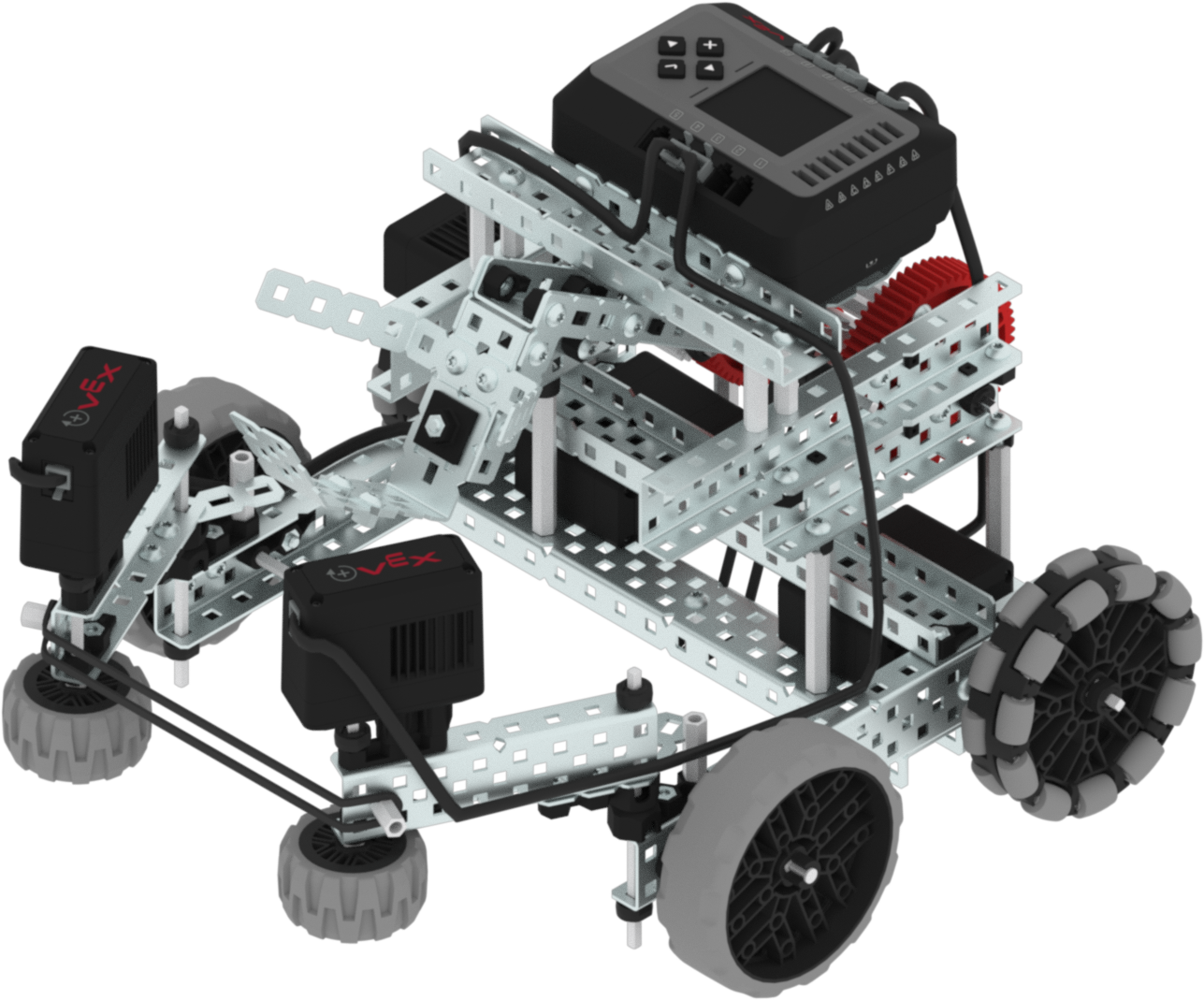
In deze unit ga je ontdekken hoe je de manipulatoren op je Clawbot, waaronder liften, kunt gebruiken om Buckyballs en ringen naar platforms van verschillende niveaus te verplaatsen. Je gaat deze kennis gebruiken om samen met een ander team een strategie te bedenken waarin robotontwerp en bestuurdersvaardigheden worden gecombineerd om deel te nemen aan de Platform Placer Competition!
Visit the Teacher's Portal for teacher support materials and videos about the content and facilitation of the Platform Placer Lessons.
Les 1: Inleiding
In deze les maak je kennis met de Platform Placer Competition, bouw je de Clawbot en bereid je je voor op het coderen.
Les 2: Verschillende objecten manipuleren
In deze les leert u over manipulators en hoe u een effectieve manipulator ontwerpt om een taak uit te voeren, zodat u de Clawbot kunt besturen om ringen en Buckyballs op verschillende platforms te scoren. Dan doe je mee aan de Push and Place Challenge.
Les 3: Liften ontwerpen
In deze les leer je over het ontwerpen van liften, zodat je op het hoge platform spelobjecten kunt scoren. Ook kun je meedoen aan de Lift and Score Challenge.
Les 4: Een strategie ontwikkelen
In deze les leert u over spelstrategie en hoe u de strategieontwikkeling met uw team kunt organiseren, zodat u een winnende strategie kunt creëren om deel te nemen aan de Shared Strategy Challenge.
Les 5: Platform Placer-wedstrijd
In deze les ga je de kennis uit de vorige lessen toepassen om mee te doen aan de Platform Placer-competitie!

Lesson 6: Conclusion
In this Lesson, you will reflect on the Unit and identify connections between what you have done and a connected STEM career.
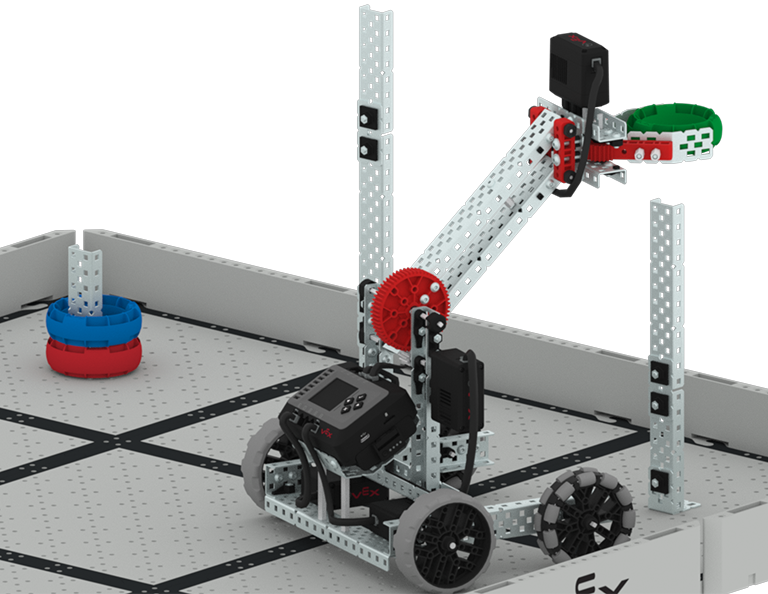
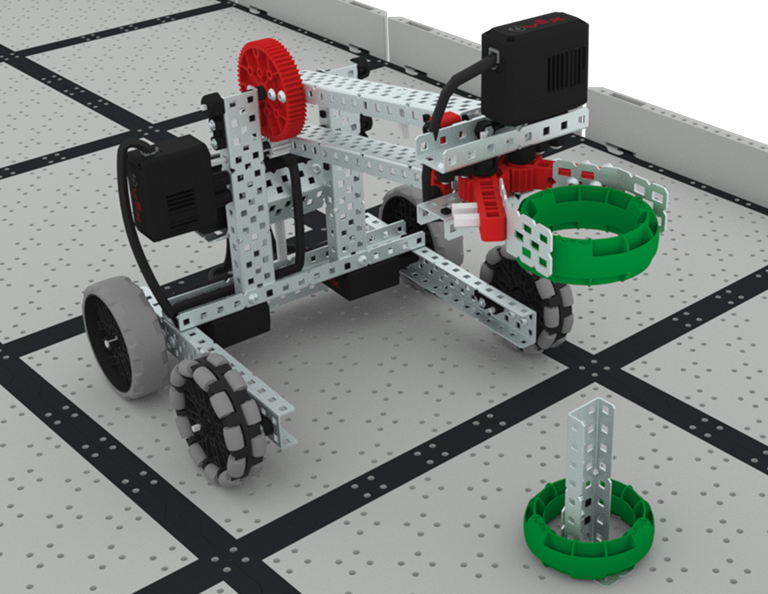
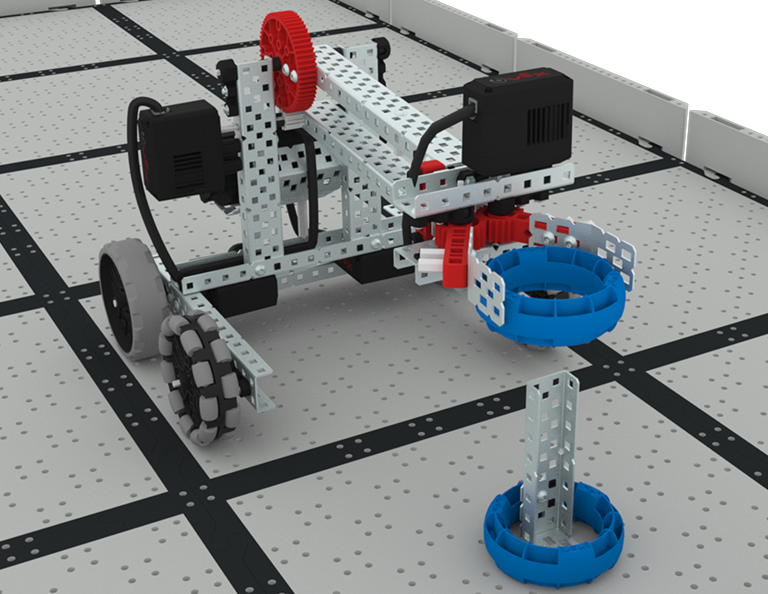
Ringleider
6 Lessen
In deze unit ga je het verschil onderzoeken tussen bestuurdersbesturing en autonome beweging. Je gebruikt namelijk meerdere programma's (autonome en bestuurdersbesturing) om ringen te scoren op palen van verschillende grootte in de Ring Leader-competitie!
Visit the Teacher's Portal for teacher support materials and videos about the content and facilitation of the Ring Leader Lessons.
Les 1: Inleiding
In deze les maak je kennis met de Ring Leader Competition, bouw je de Clawbot en word je klaargemaakt om te programmeren.
Les 2: Bestuurdersbesturing
In deze les leer je hoe je het Driver Control Program op de EXP Brain kunt gebruiken, zodat je met de Clawbot ringen op het veld kunt manipuleren en kunt deelnemen aan de Speed and Score Challenge.
Les 3: Coderen voor autonome bewegingen
In deze les leert u hoe u uw robot kunt coderen voor autonome bewegingen. Ook leert u hoe u de route van uw robot kunt plannen. Vervolgens maak je een VEXcode EXP-project om ringen op palen te plaatsen in de Coding Crunch Challenge.
Les 4: Meerdere programma's gebruiken (autonoom en driver)
In deze les leert u hoe u de besturing van uw chauffeur kunt aanpassen en hoe u de Controller en VEXcode EXP kunt gebruiken om uw chauffeursstrategie te optimaliseren voor deelname aan de Split Decision Challenge.
Les 5: Leidercompetitie
In deze les ga je de kennis uit de vorige lessen toepassen om mee te doen aan de Ring Leader-competitie!
Les 6: Conclusie
In deze les reflecteert u op de module en identificeert u verbanden tussen wat u hebt gedaan en een daarmee samenhangende STEM-carrière.
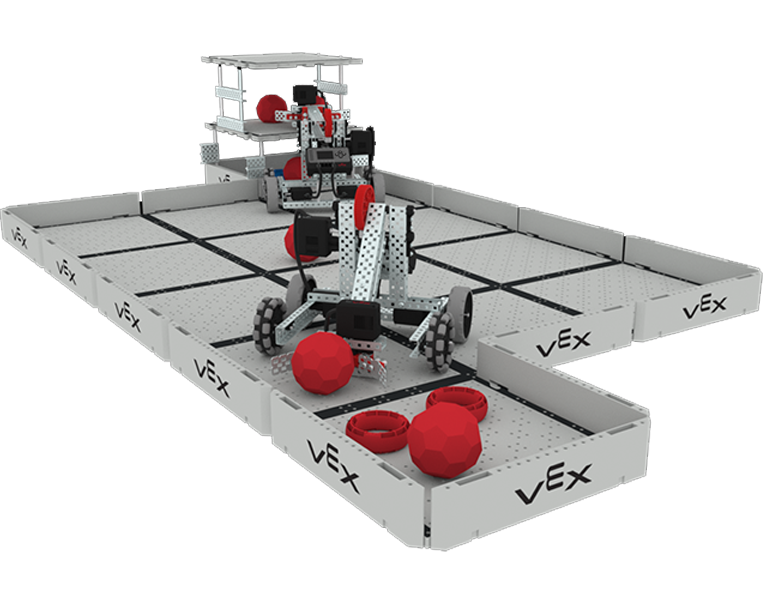
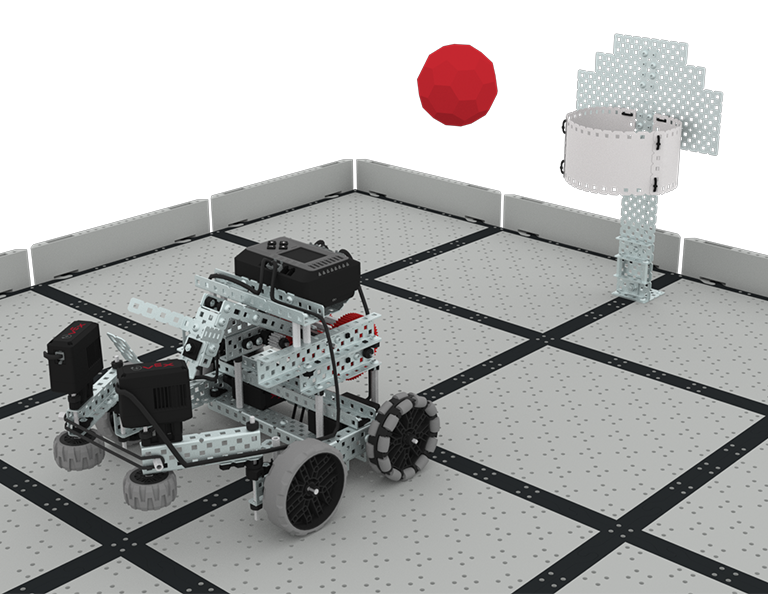
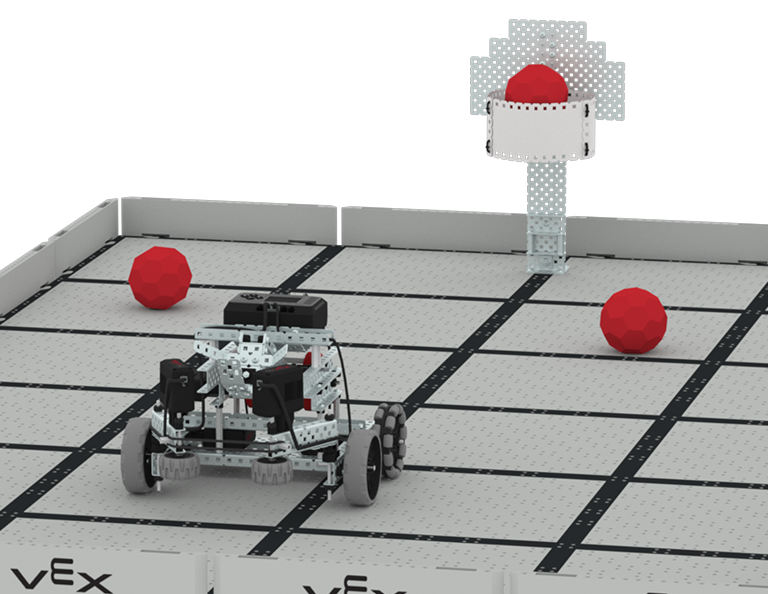
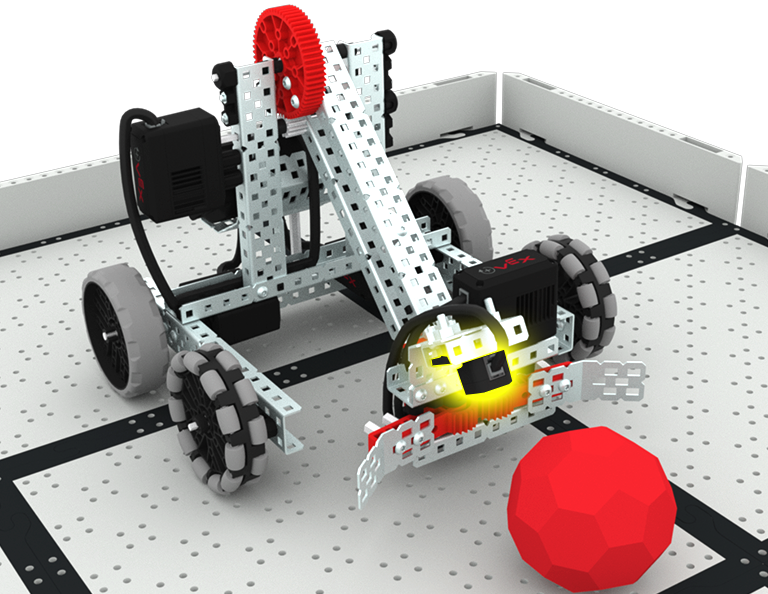
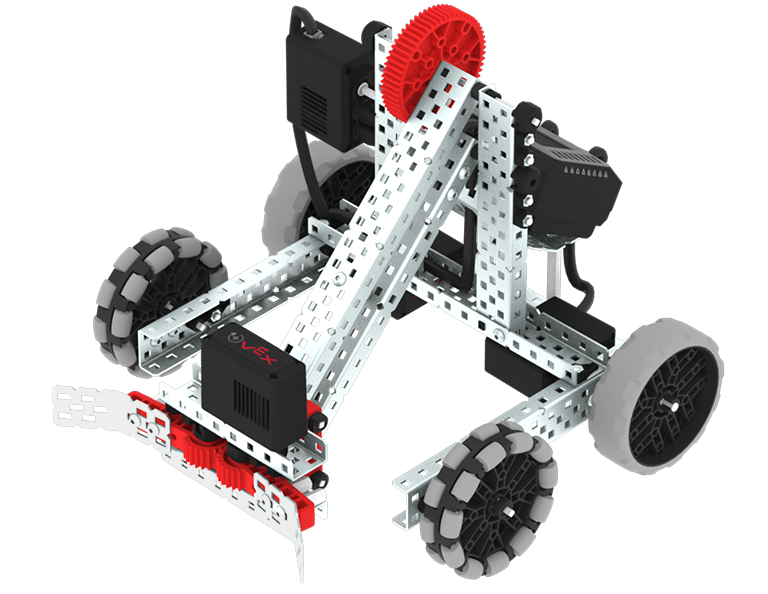
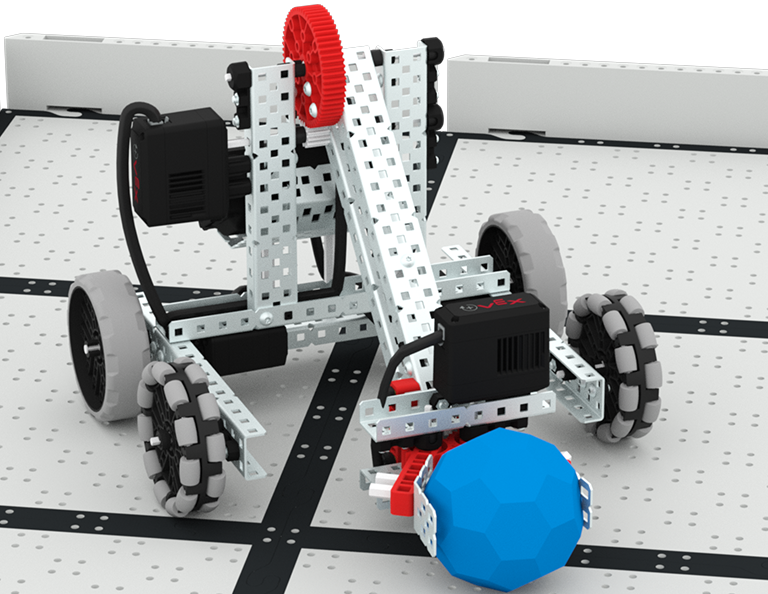
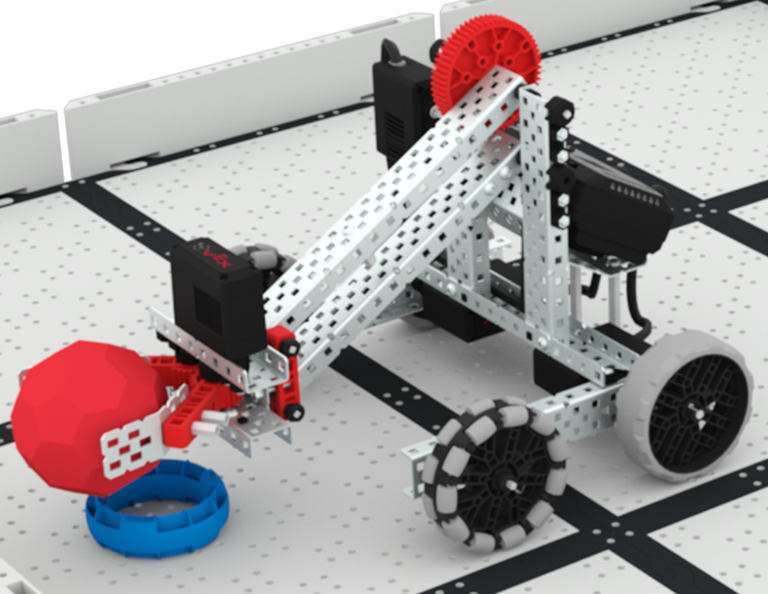
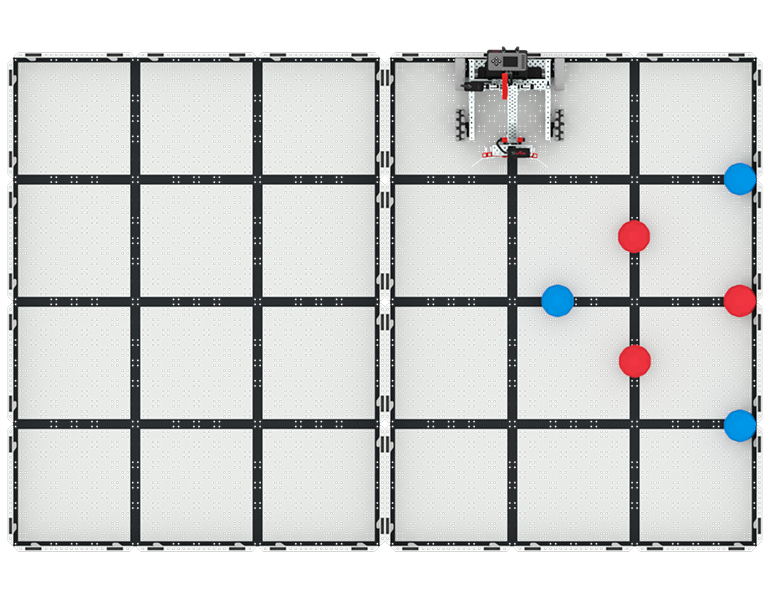
Bucky Basketbal
4 Lessen
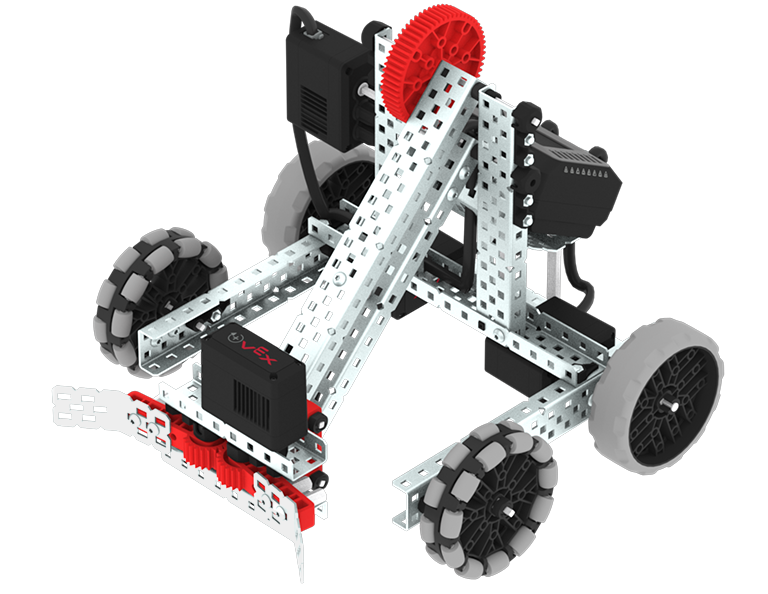
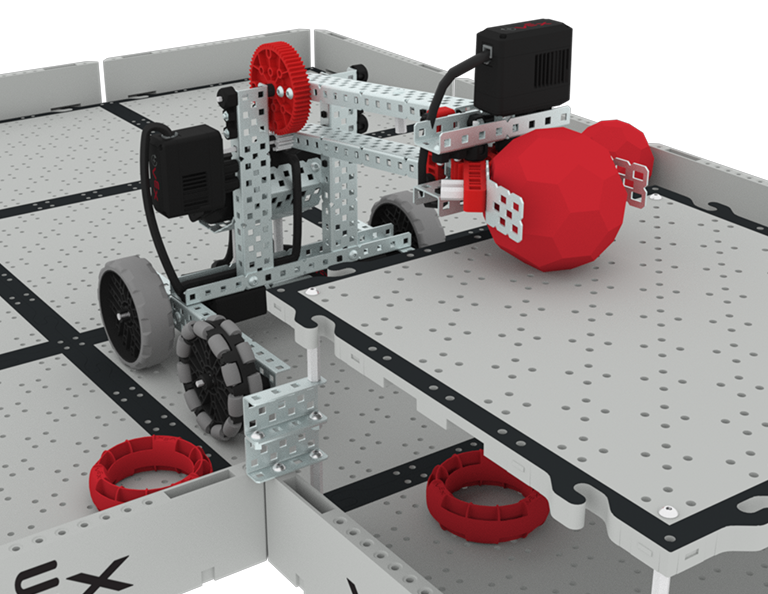
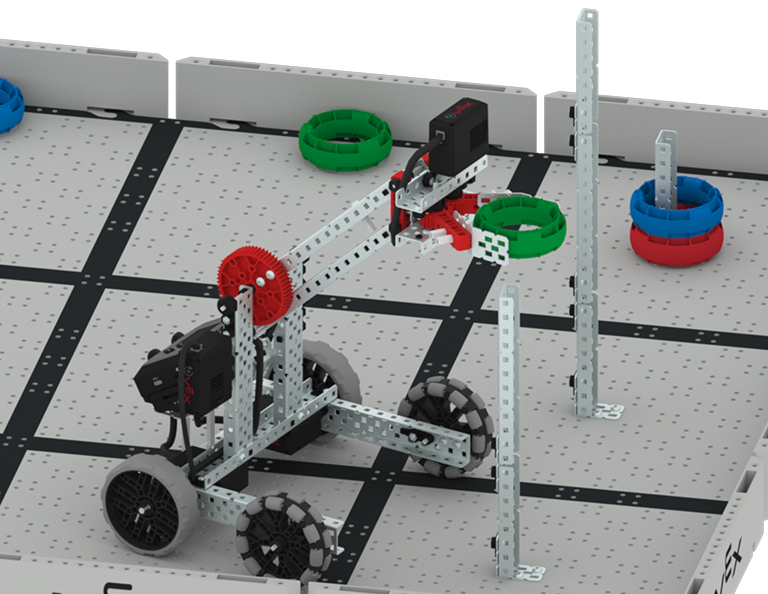
In deze unit ontdek je hoe je de CatapultBot bestuurt om Buckyballs te verzamelen, te schieten en in hoepels te scoren in de Bucky Basketball-competitie!
Visit the Teacher's Portal for teacher support materials and videos about the content and facilitation of the Bucky Basketball Lessons.
Les 1: Inleiding
In deze les ga je de CatapultBot bouwen en je controller en batterij opladen.
Les 2: De CatapultBot besturen
In deze les leer je hoe de inlaat en katapult van de CatapultBot werken en hoe je hem met de controller kunt besturen om deel te nemen aan de Buckyball Basket Challenge!
Les 3: Bucky-basketbalcompetitie
In deze les ga je de kennis uit de vorige lessen toepassen om mee te doen aan de Bucky Basketball-competitie!
Les 4: Conclusie
In deze les reflecteert u op de module en identificeert u verbanden tussen wat u hebt gedaan en een daarmee samenhangende STEM-carrière.
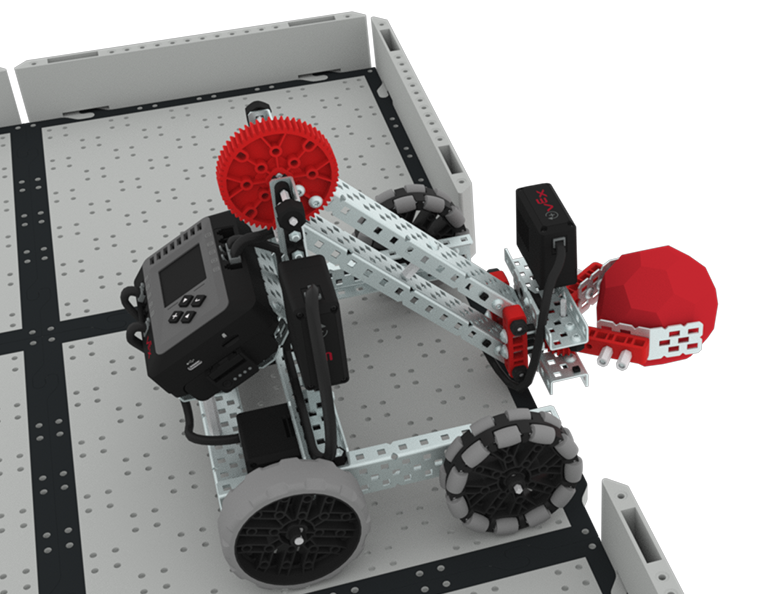
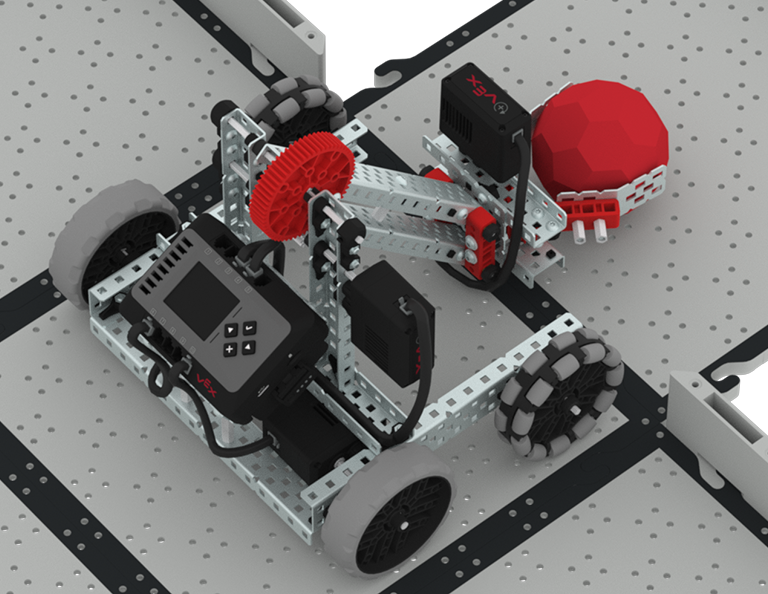
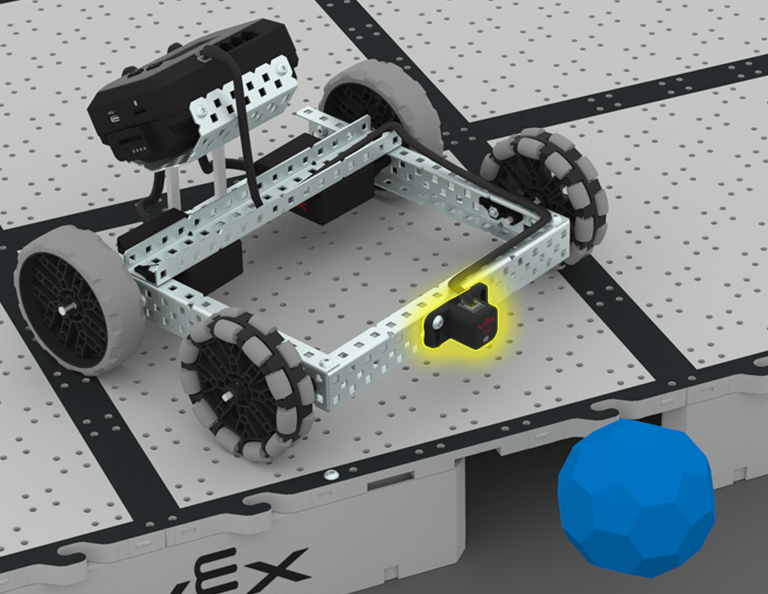
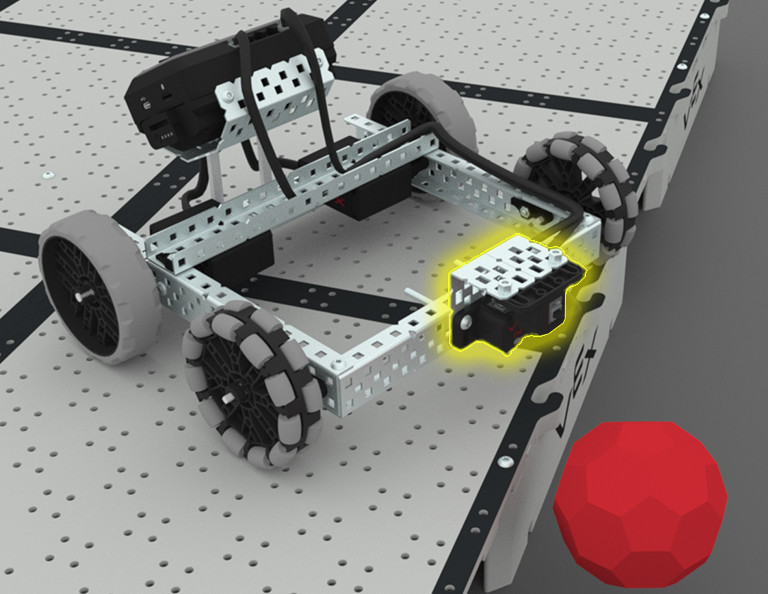
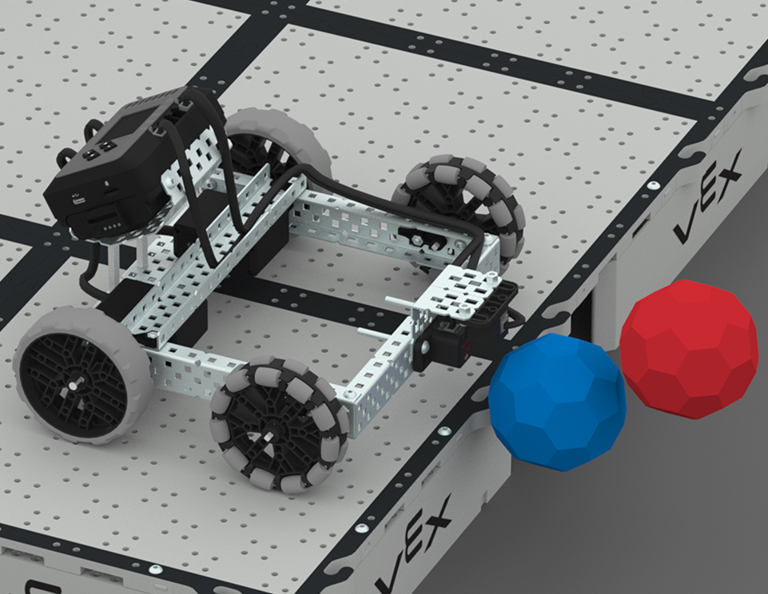
Schattenjacht
5 Lessen
In deze unit ga je de Clawbot met optische sensor bouwen en programmeren. Hiermee kun je rode Buckyballs herkennen en verzamelen om mee te doen aan de Treasure Hunt-competitie!
Bezoek het docentenportaal voor ondersteunend materiaal voor docenten en video's over de inhoud en het faciliteren van de schattenjachtlessen.
Les 1: Inleiding
Je maakt kennis met de Treasure Hunt-competitie, bouwt de Clawbot en bent klaar om te programmeren.
Les 2: Klauw zonder sensor
In deze les leer je hoe je de Drivetrain- en Motion-blokken in VEXcode EXP kunt gebruiken om je Clawbot te programmeren om Buckyballs te verzamelen en te verplaatsen in de Collector Challenge.
Les 3: Klauw met sensor
In deze les leer je hoe je de optische sensor moet coderen om een rode Buckyball te detecteren, verzamelen en verplaatsen in de Treasure Mover-uitdaging!
Les 4: Schattenjachtwedstrijd
In deze les ga je de kennis uit de vorige lessen toepassen om deel te nemen aan een schattenjachtwedstrijd!
Les 5: Conclusie
In deze les reflecteert u op de module en identificeert u verbanden tussen wat u hebt gedaan en een STEM-carrière.
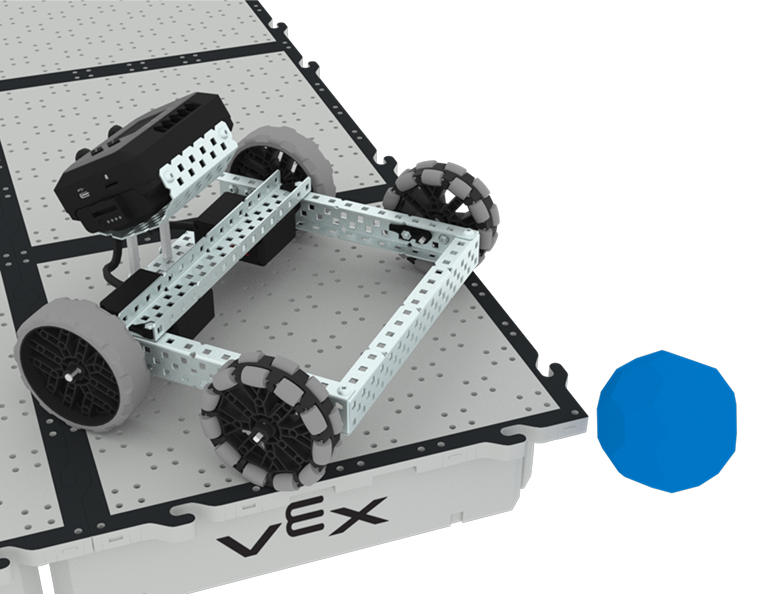
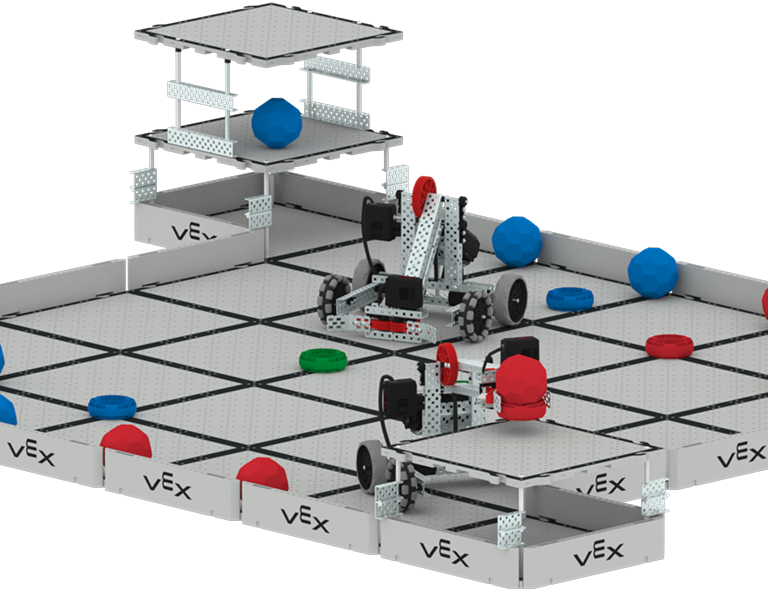
Kasteel Crasher
6 Lessen
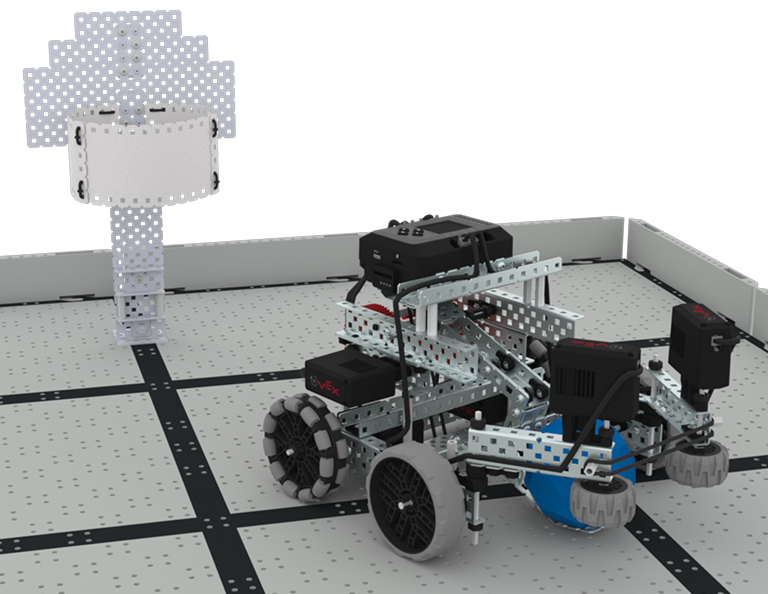
In deze unit ontdek je hoe je de optische en afstandssensoren kunt gebruiken om Buckyball-kastelen te zoeken, te laten crashen en te ontruimen. Zo scoor je punten in de Castle Crasher-competitie!
Bezoek het docentenportaal voor ondersteuningsmateriaal voor docenten en video's over de inhoud en het faciliteren van de Castle Crasher-lessen.
Les 1: Inleiding
In deze les maak je kennis met de Castle Crasher-competitie, bouw je de BaseBot en word je klaargemaakt om te coderen.
Les 2: Castle Crasher Geen sensoren
In deze les leert u hoe u hoeken kunt berekenen en de snelheid van uw robot kunt veranderen, zodat u kunt deelnemen aan de Buckyball Blitz Challenge.
Les 3: Castle Crasher + Afstandssensor
In deze les leert u wat een afstandssensor is en hoe u deze op uw robot kunt gebruiken. U leert ook over het [Wacht tot]-blok en hoe u dit kunt gebruiken in een VEXcode EXP-project. Vervolgens ga je wat je hebt geleerd toepassen om deel te nemen aan de Sense and Sweep Challenge!
Les 4: Algoritmen creëren
In deze les leert u over de optische sensor en hoe u een algoritme kunt maken dat gebruikmaakt van sensorfeedback. Vervolgens programmeer je je robot zo dat hij zelfstandig Buckyballs kan vinden en ze van het veld kan duwen in de Sweep the Field Challenge.
Les 5: Castle Crasher-competitie
In deze les ga je de kennis uit de vorige lessen toepassen om deel te nemen aan een Castle Crasher-wedstrijd!

Les 6: Conclusie
In deze les reflecteert u op de module en identificeert u verbanden tussen wat u hebt gedaan en een STEM-carrière.
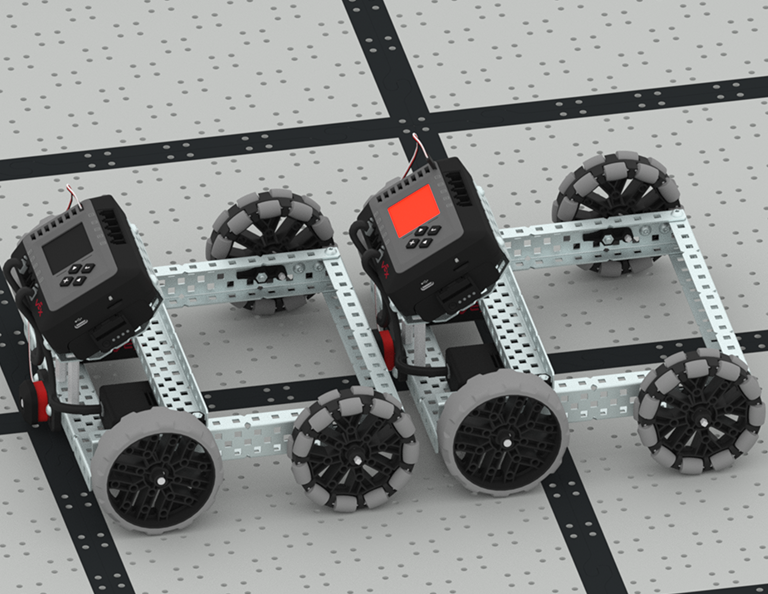
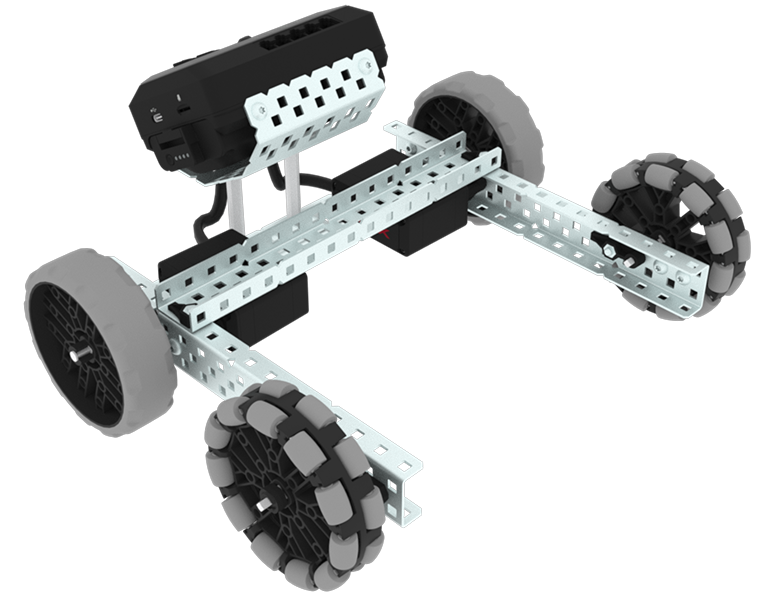
Team Freeze Tag
6 Lessen
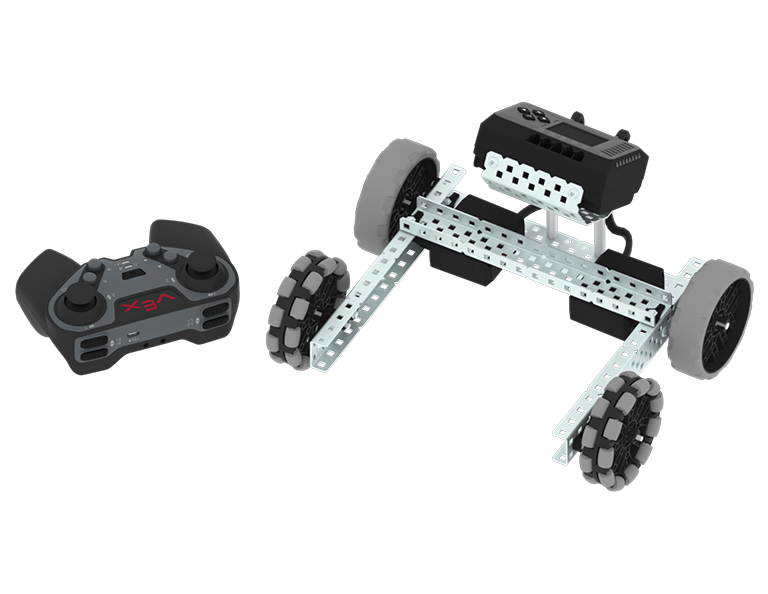
In deze unit bestuur je je robot met de controller, kies je wielen en voeg je een bumperschakelaar toe om mee te doen aan de Team Freeze Tag-competitie!
Bezoek het docentenportaal voor ondersteunend materiaal voor docenten en video's over de inhoud en het faciliteren van de Team Freeze Tag-lessen.
Les 1: Inleiding
In deze les maak je kennis met de Team Freeze Tag-competitie, stel je de batterij en controller in en bouw je de BaseBot.
Les 2: Rijden met de EXP-controller
In deze les leert u hoe u de BaseBot bestuurt met behulp van de EXP-controller. Ook oefent u uw rijvaardigheid om deel te nemen aan een uitdagende activiteit waarbij u een achtje rijdt!
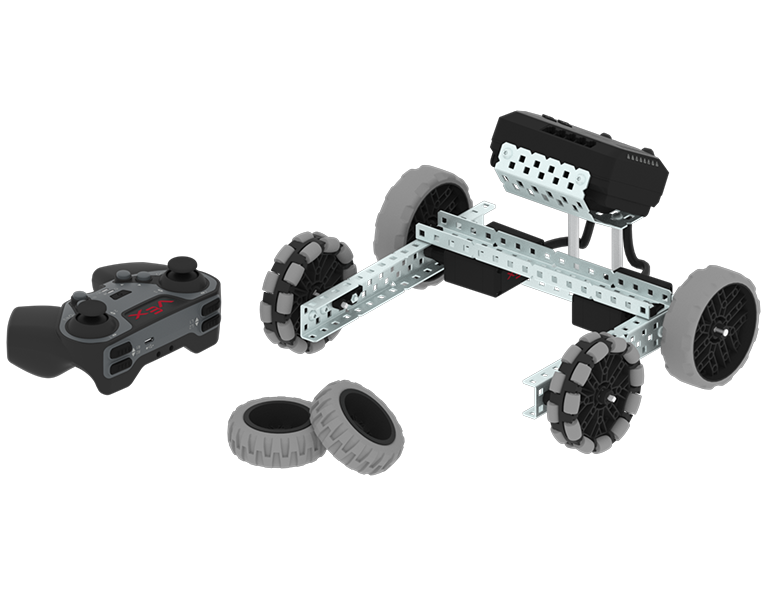
Les 3: De wielen verwisselen
In deze les leert u hoe u de wielen van de BaseBot kunt verwisselen en experimenteert u met verschillende wielcombinaties om de rijvaardigheid van de robot te verbeteren in de Figure Eight Wheel Challenge.
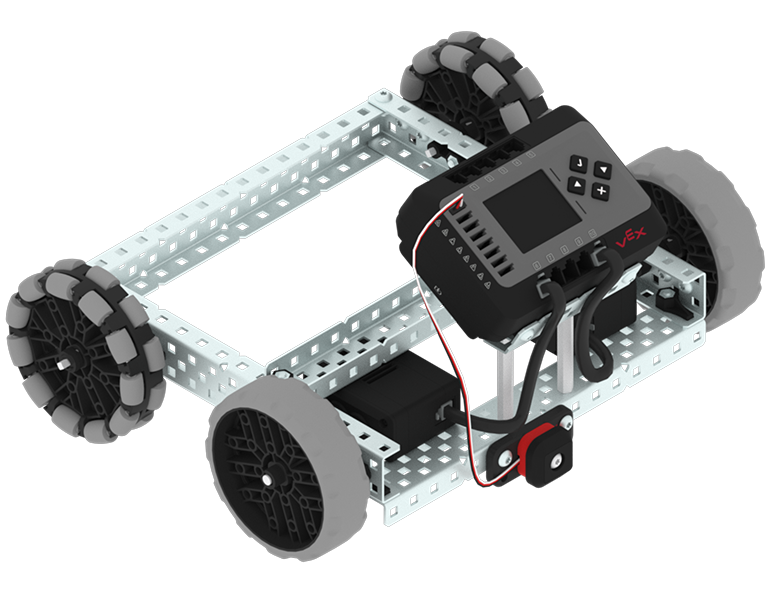
Les 4: De bumperschakelaar en het afdrukken toevoegen aan het hersenscherm
In deze les voeg je een Bumper Switch toe aan je BaseBot en leer je hoe je op het Brain-scherm kunt printen om mee te doen aan 1-tegen-1 Freeze Tag!
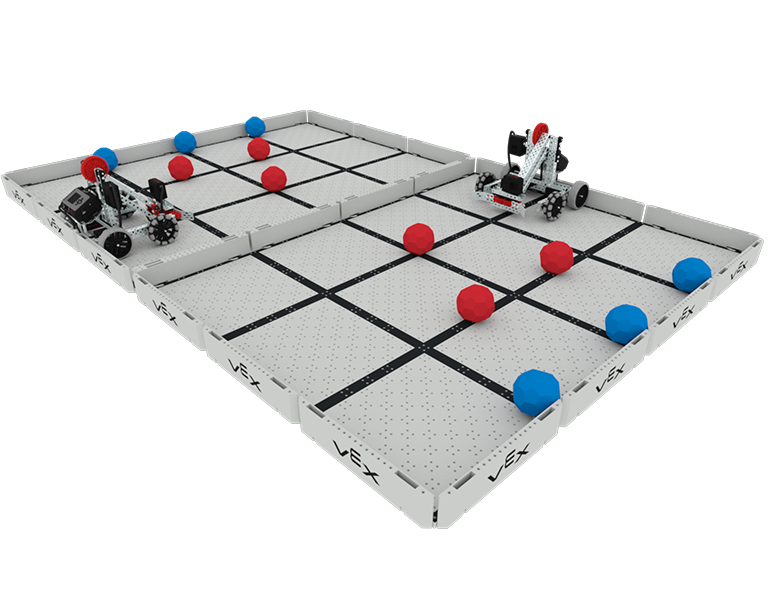
Les 5: Team Freeze Tag-competitie
In deze les gaan jullie alle vaardigheden die jullie in de vorige lessen hebben geleerd combineren om een potje Team Freeze Tag te spelen!
Les 6: Conclusie
In deze les reflecteert u op de module en identificeert u verbanden tussen wat u hebt gedaan en een STEM-carrière.
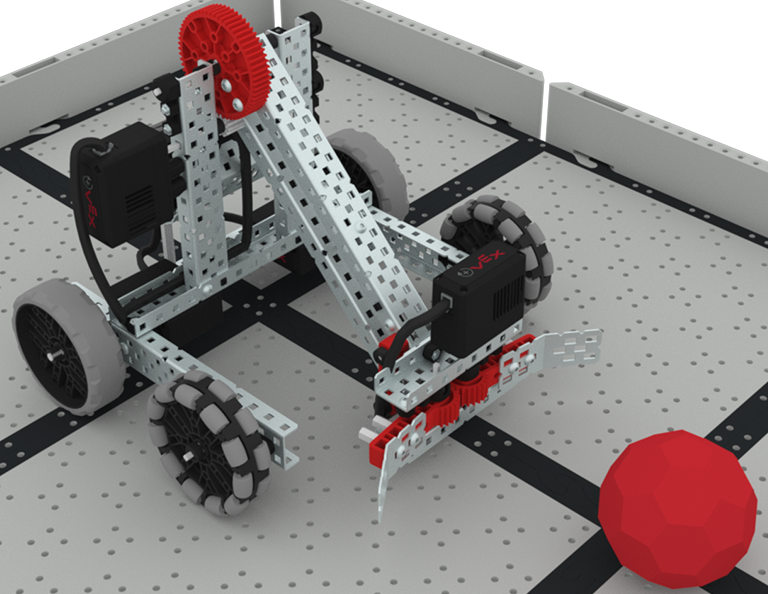
Omhoog en over
6 Lessen
In deze unit ga je ontdekken hoe je een Clawbot kunt ontwerpen die Buckyballs verzamelt, oppakt en verplaatst van de ene kant van het veld naar de andere kant, in de Up and Over-competitie!
Bezoek het docentenportaal voor ondersteuningsmateriaal voor docenten en video's over de inhoud en het faciliteren van de Up and Over-lessen.
Les 1: Inleiding
In deze les maak je kennis met de Up and Over-competitie, stel je de batterij en controller in, bereid je je voor op het coderen en bouw je de Clawbot.
Les 2: Klauwontwerp
In deze les leert u wat een klauw is, hoe een effectieve klauw werkt en hoe scouting de ontwerpen en strategie van uw team ten goede kan komen. Vervolgens ga je toepassen wat je hebt geleerd tijdens de Grab and Go-uitdaging.
Les 3: Armontwerpen
In deze les leert u over de verschillende onderdelen van robotarmen, hoe ze werken en wat een effectief armontwerp is. Vervolgens ontwerp en bouw je een arm waarmee je robot Buckyballs in ringen kan stapelen voor de Stacked Up-uitdaging.
Les 4: Motorische groepen
In deze les leert u wat motorgroepen zijn, hoe ze nuttig kunnen zijn en hoe u motorgroepen in VEXcode EXP configureert om iteraties op uw robot uit te voeren en de Up and Over-uitdaging te voltooien.
Les 5: Up and Over-competitie
In deze les ga je de kennis uit de vorige lessen toepassen om mee te doen aan de Up and Over-competitie!
Les 6: Conclusie
In deze les reflecteert u op de module en identificeert u verbanden tussen wat u hebt gedaan en een STEM-carrière.