
Programmeren van rechts- en linksdraaiend - C++
Speedbot is klaar om te draaien!
Deze verkenning geeft je de tools om te beginnen met het maken van een aantal coole projecten voor je Speedbot om te volgen.
- VEXcode V5-instructies die in deze verkenning zullen worden gebruikt:
- Drivetrain.turnFor(rechts, 90, graden);
-
Voor meer informatie over de instructie selecteert u Help en selecteert u vervolgens het vraagtekenpictogram naast een opdracht om meer informatie te zien.

- Zorg ervoor dat u de benodigde hardware, uw technische notebook en VEXcode V5 hebt gedownload en gereed hebt.
| Aantal | Benodigde materialen |
|---|---|
| 1 |
Speedbot-robot |
| 1 |
Opgeladen robotbatterij |
| 1 |
VEXcode V5 |
| 1 |
USB-kabel (bij gebruik van een computer) |
| 1 |
Technisch notitieboekje |
Stap 1: Voorbereiding op de verkenning
Heb je elk van deze items klaar voordat je met de activiteit begint?
- Zijn alle motorenop de juiste poortenaangesloten?
- Zijn de slimme kabelsvolledig in alle motorengestoken?
- Staat Brainop?
- Is de batterijopgeladen?
Stap 2: Start een nieuw project
Voer de volgende stappen uit om het project te starten:
-
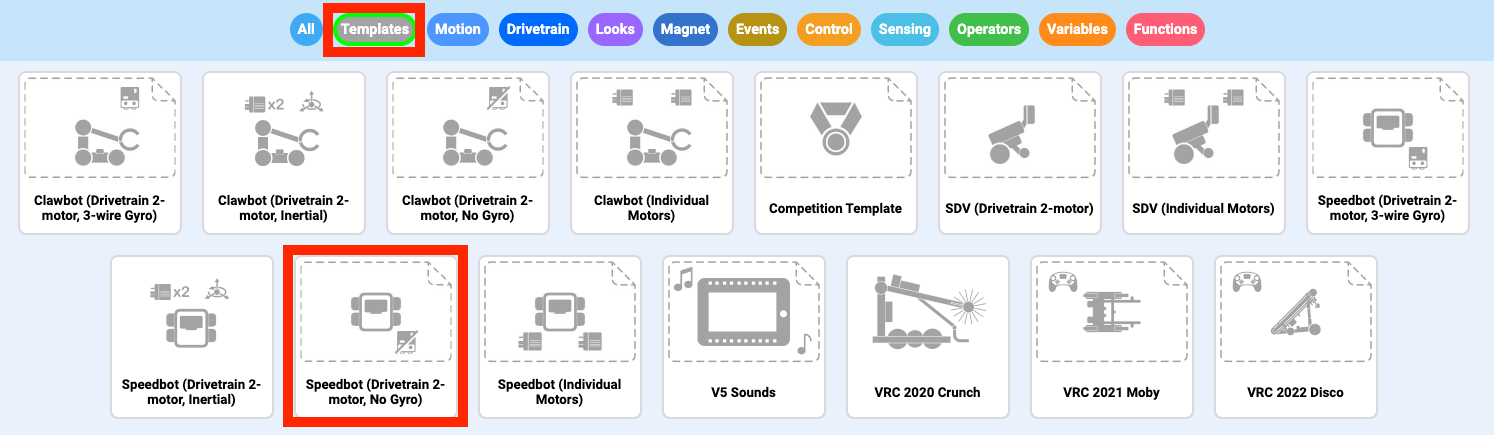
Open het menu Bestand en selecteer Voorbeelden openen.

-
Selecteer en open het Speedbot (Drivetrain 2-motor, No Gyro) -sjabloonproject. Het sjabloonproject bevat demotorconfiguratievan de Speedbot. Als de sjabloon niet wordt gebruikt, zal uw robot het project niet correct uitvoeren.
-
Omdat je de Speedbot gaat draaien, noem je je projectTurn.

-
Wanneer u klaar bent, selecteert uOpslaan.

![]() Tips voor leraren
Tips voor leraren
Projectnamen kunnen spaties tussen of na de woorden bevatten.
Stap 3: Ga rechtsaf
U bent nu klaar om te beginnen met het programmeren van de robot om rechtsaf te slaan!
-
Voeg de instructie toe aan het project zodat je project er als volgt uitziet:
int main() { //Robotconfiguratie initialiseren. NIET VERWIJDEREN! vexcodeInit(); // Begin projectcode Drivetrain.turnFor(rechts, 90, graden); } - Selecteer het Slot-pictogram om een van de acht beschikbare slots op de Robot Brain te kiezen en selecteer sleuf 1.
- Sluit de V5 Robot Brain aan op de computer met behulp van een micro-USB-kabel en schakel de V5 Robot Brain in. Het Brein-icoontje in de werkbalkwordt groenzodra er een succesvolle verbinding tot stand is gebracht.
- Wanneer de V5 Robot Brain is verbonden met de computer, verandert het Build-pictogram in het Download-pictogram. SelecteerDownloadom het project naar de Brain te downloaden.
![]() Toolbox voor leraren
Toolbox voor leraren
Herinner de leerlingen eraan dat ze de USB-kabel uit de Robot Brain moeten halen. Als de robot tijdens het uitvoeren van een project verbinding maakt met een computer, kan het zijn dat de robot aan de verbindingskabel trekt.
![]() Toolbox voor leerkrachten
-
Stop en bespreek
Toolbox voor leerkrachten
-
Stop en bespreek
Vraag de leerlingen te voorspellen wat er volgens hen zal gebeuren als dit project wordt gedownload en uitgevoerd op de Speedbot. Vraag de leerlingen om hun voorspellingen in hun technische notitieboekjes te schrijven. Als de tijd het toelaat, vraag dan elke groep om hun voorspellingen te delen.
-
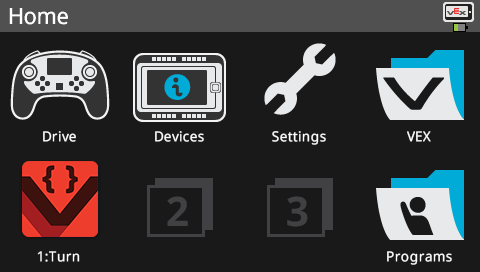
Controleer of uw project is gedownload (C++) door naar het scherm van Robot Brain te kijken. De projectnaam Turn moet worden vermeld in sleuf 1.
![]() Toolbox voor docenten
-
Model Eerst
Toolbox voor docenten
-
Model Eerst
-
Laat het project eerst door de klas uitvoeren, voordat alle leerlingen er tegelijk mee aan de slag gaan. Verzamel de studenten op één plek en laat voldoende ruimte over voor de Speedbot om te bewegen als deze op de grond wordt geplaatst.
-
Vertel de studenten dat zij nu aan de beurt zijn om hun project uit te voeren. Zorg ervoor dat ze een vrije doorgang hebben en dat de Speedbots elkaar niet kunnen raken.
-
Herinner leerlingen eraan dat ze hun projecten moeten opslaan terwijl ze eraan werken. In deze sectie (C++) uit de VEX-bibliotheek worden de opslagmethoden in VEXcode V5 uitgelegd.
- Voer het project (C++) uit op de Speedbot-robot door ervoor te zorgen dat het project is geselecteerd en druk vervolgens op de knopRunop de Robot Brain.
Stap 4: Ga linksaf
Nu u uw robot hebt geprogrammeerd om naar rechts te draaien, laten we hem programmeren om naar links te draaien.
-
Wijzig de parameter in de instructie omleftweer te geven in plaats vanright, zodat uw project er als volgt uitziet:
int main() { //Robotconfiguratie initialiseren. NIET VERWIJDEREN! vexcodeInit(); // Begin projectcode Drivetrain.turnFor(links, 90, graden); } - Selecteer de projectnaam om deze te wijzigen van Turn naar TurnLeft.
- Selecteer het Slot-pictogram om een nieuw slot te kiezen. Selecteer sleuf 2.
- Download (C++) het project.
- Controleer of uw project is gedownload (C++) door naar het scherm van Robot Brain te kijken. De projectnaam TurnLeft moet worden vermeld in sleuf 2.
- Voer (C++) het project uit op de robot door ervoor te zorgen dat het project is geselecteerd en druk vervolgens op de knopRun.
Stap 5: Wacht en ga dan linksaf
Nu we de robot hebben geprogrammeerd om naar links te gaan en vervolgens naar links, kunnen we nu een wachtinstructie toevoegen, zodat de robot een bepaalde tijd wacht voordat hij naar links gaat.
-
Voeg een Wachtinstructie toe voor de opdracht Drive for. Zorg ervoor dat de Wait is ingesprongen om overeen te komen met de Drive for commando, en dat alle commando's zich binnen de gekrulde accolades bevinden. Dit vertelt de robot om drie seconden te wachten voordat hij naar links gaat.
wacht(3, seconden); Drivetrain.turnFor(links, 90, graden); - Selecteer de projectnaam om deze te wijzigen van TurnLeft naar WaitLeft.
- Selecteer het Slot-pictogram om een nieuw slot te kiezen. Selecteer sleuf 3.
- Download (C++) het project.
- Controleer of uw project is gedownload (C++) door naar het scherm van Robot Brain te kijken. De projectnaam WaitLeft moet worden vermeld in sleuf 3.
- Voer (C++) het project uit op de robot door ervoor te zorgen dat het project is geselecteerd en druk vervolgens op de knopRun.
Stap 6: Voltooi de beveiligingscamera-uitdaging!

In de Security Camera Challenge moet de robot beginnen met 90 graden naar rechts te draaien. De robot zal dan 180 graden naar links draaien en 180 graden naar rechts "scannen", net als een beveiligingscamera. De robot zal dan nog twee keer 180 graden naar links en 180 graden naar rechts draaien. De robot scant dus in totaal drie keer 180 graden.
Voordat u de robot programmeert, moet u het pad en het gedrag van de robot in uw technisch notitieboekje uitstippelen.
Nadat u de beveiligingscamera-uitdaging hebt voltooid, kunt u voorwaartse en achterwaartse bewegingen combineren met extra robotgedragingen om nog geavanceerdere uitdagingen te voltooien.
![]() Teacher Toolbox
-
Oplossing
Teacher Toolbox
-
Oplossing
Bekijk hieronder de voorbeeldoplossing.
int main() {
// Robotconfiguratie initialiseren. NIET VERWIJDEREN!
vexcodeInit();
// Begin projectcode
// De robot draait 90 graden naar rechts
Drivetrain.turnFor(right, 90, degrees);
// De robot draait 180 graden naar links
Drivetrain.turnFor(left, 190, degrees);
// De robot draait 180 graden naar rechts
Drivetrain.turnFor(right, 180, degrees);
// De robot draait 180 graden naar links
Drivetrain.turnFor(left, 180, degrees);
// De robot draait 180 graden naar rechts
Drivetrain.turnFor(right, 180, degrees);
// De robot draait 180 graden naar links
Drivetrain.turnFor(left, 180, degrees);
// De robot draait 180 graden naar rechts
Drivetrain.turnFor(right, 180, degrees);
}