
Lição 3: Usando o Feedback do Sensor Relatado para Recolher Discos
Esta lição usará o feedback do sensor relatado para resolver o mesmo desafio da lição 2. O Robô VR irá pegar e mover o primeiro disco azul para a baliza azul.
-
Inicie um novo projeto no VEXcode VR e nomeie o projeto Unit8Lesson3.

-
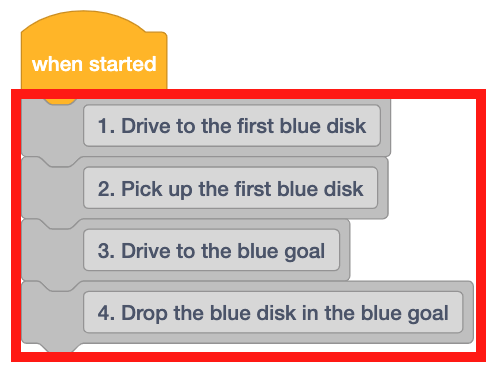
Arraste quatro blocos de comentários para o espaço de trabalho. Adicione comentários para cada uma das etapas necessárias para que o Robô VR dirija para o primeiro disco, pegue-o e retorne-o para a meta azul.
-
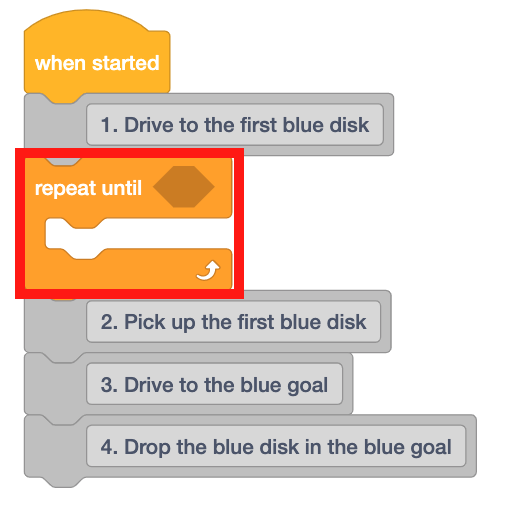
Arraste um bloco [Repetir até] para o espaço de trabalho abaixo do primeiro comentário.
Para sua informação
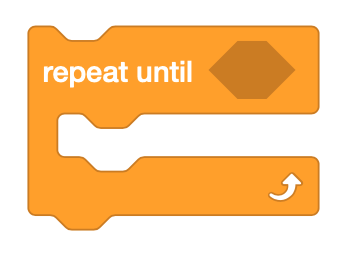
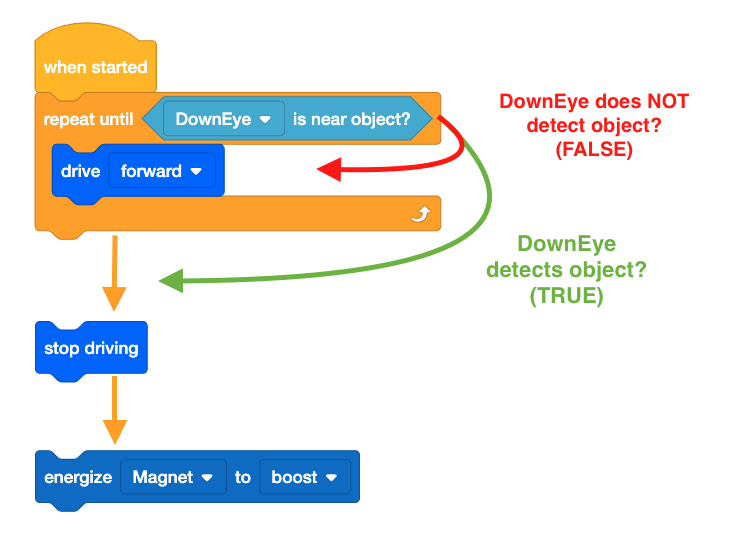
O bloco [Repeat until] é um bloco C que aceita blocos reportadores booleanos. O bloco [Repetir até] verificará apenas a condição booleana no início de cada loop. Se a condição booleana for relatada como FALSA, os blocos internos serão executados. Se a condição booleana for relatada como VERDADEIRA, os blocos internos serão ignorados.
-
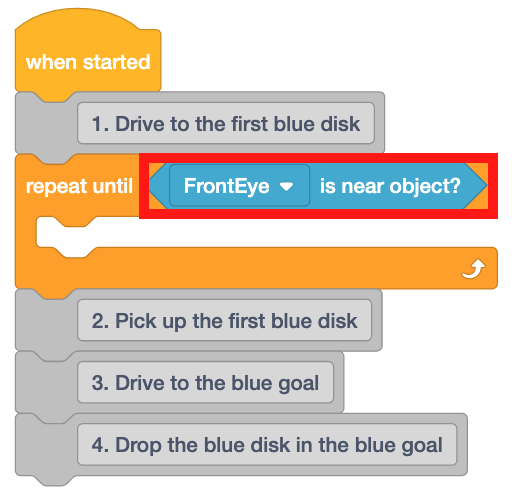
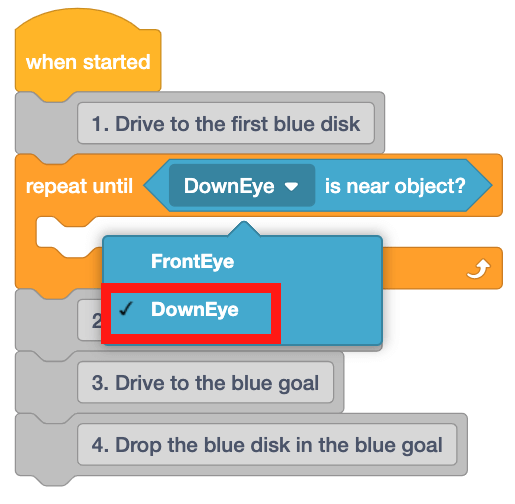
O <Eye Sensor near object> bloco É reportado como VERDADEIRO quando o robô VR detecta um disco colorido no Disk Mover Playground. Arraste este bloco para o projeto.
-
Os discos no Playground Disk Mover estão no chão do Playground e não podem ser detectados pelo Sensor de Olhos Frontal. Por esse motivo, defina o <Eye Sensor near object> bloco para ‘DownEye’.
-
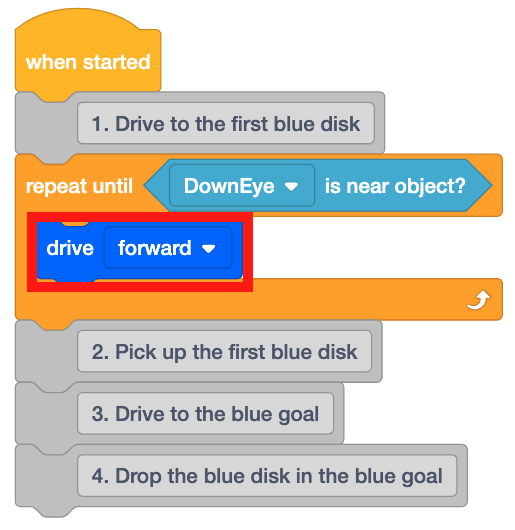
Os blocos no interior do bloco [Repetir até] serão executados quando o Robô VR NÃO detectar um objeto. Para alcançar um dos discos, o Robô VR precisará avançar até que o disco seja detectado.

-
Arraste um bloco [Drive] para o bloco [Repeat until].
-
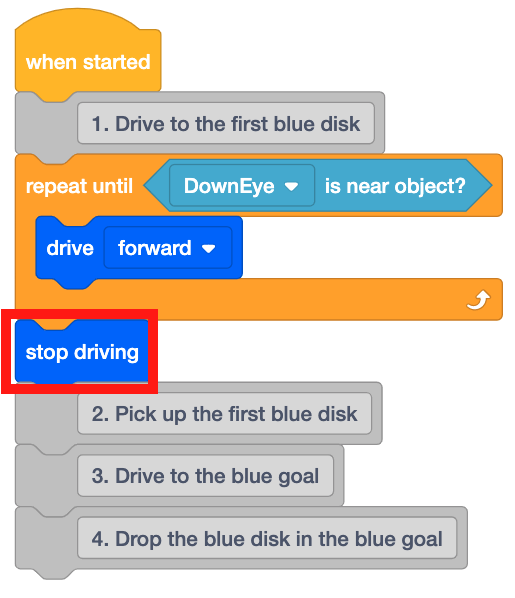
Quando um disco é detectado, o Robô VR precisará parar de dirigir para buscá-lo. Arraste um bloco [Stop driving] e coloque-o sob o bloco [Repeat until].
-
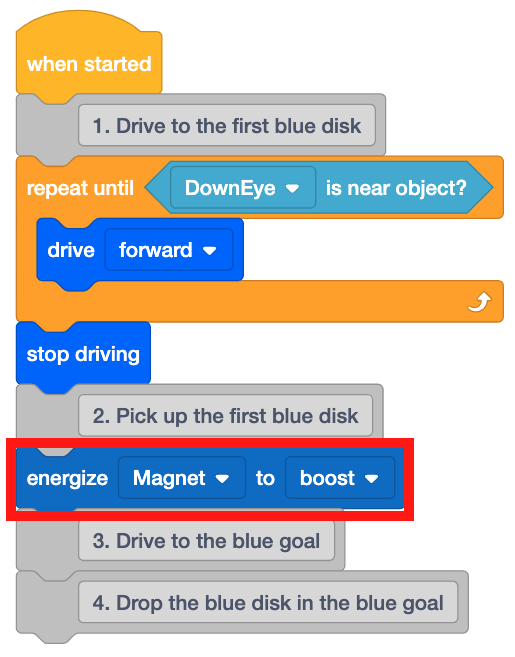
Agora, instrua o Robô VR a pegar o disco com o Eletroímã, colocando um bloco [Energize Electromagnet] abaixo do segundo comentário.
- Abra o Playground do Disk Mover se ainda não estiver aberto e execute o projeto.
-
O robô VR avança até que o primeiro disco azul seja detectado pelo sensor de olho para baixo, para de dirigir e energiza o eletroímã para pegar o disco.

- Observe como o bloco [Repetir até] funciona neste projeto.
- Uma vez que o Sensor de Olho para Baixo no Robô VR detecta um objeto, o projeto passa para o próximo bloco na pilha abaixo do bloco [Repetir até].
- Neste projeto, isso significou que o robô VR parou de conduzir e energizou o eletroímã.
Usando Blocos de Interruptor
A imagem abaixo exibe o gráfico do fluxo de trabalho desta lição usando blocos Switch. Comparar este gráfico com o gráfico acima pode ajudá-lo a entender melhor o fluxo de trabalho dos novos comandos do Switch Python que você está aprendendo.

Selecione o botão Seguinte para continuar com o resto desta lição.