
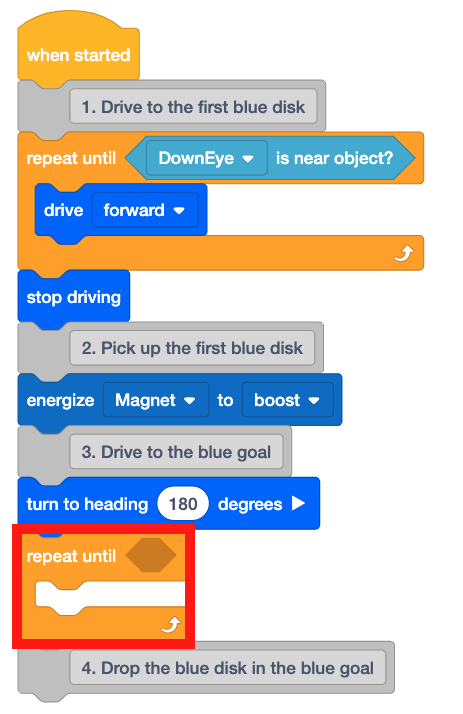
Lição 3: Usando o feedback do sensor relatado para colocar os discos na meta
Na Lição 2, o Robô VR dirigiu em sentido inverso de volta ao ponto de partida para soltar o disco. Isso exigia que o usuário calculasse a distância exata para o Robô VR percorrer. Isso nem sempre é possível. Em vez disso, o Robô VR pode usar valores de sensor relatados para pegar e soltar discos com precisão consistente.
A lição 3 usa o feedback do sensor relatado para determinar onde o robô VR deve parar de dirigir ao retornar à meta. Ao usar o <Eye Sensor near object> bloco anteriormente nesta lição, não há necessidade de saber a distância da meta até cada disco.

O Robô VR voltará para a meta azul usando dados do Sensor de Distância para determinar onde parar de dirigir. Uma vez que o Robô de RV tenha parado dentro da meta azul, o Robô de RV soltará o disco azul.
- Continuar a trabalhar no projeto Unit8Lesson3.
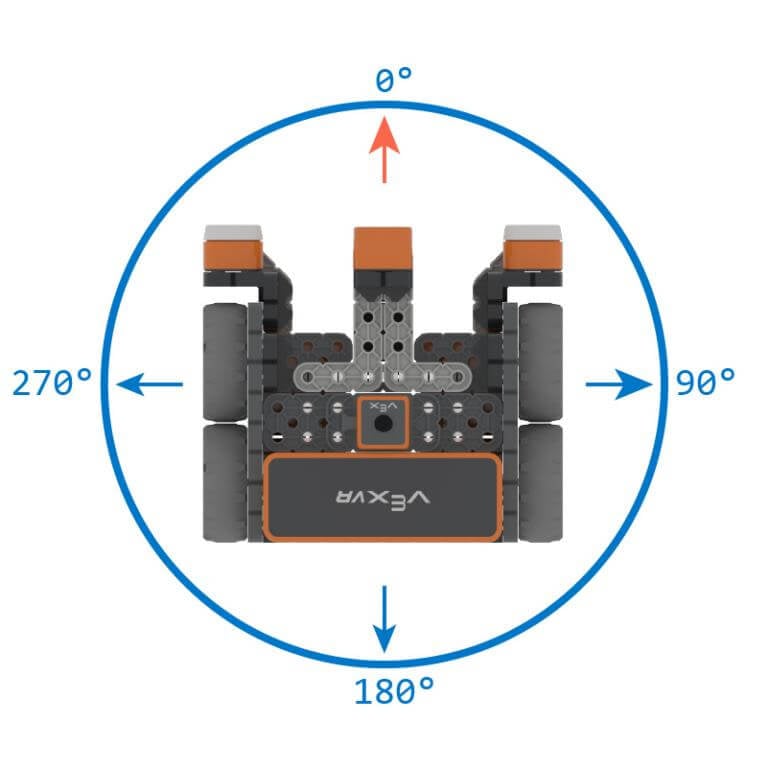
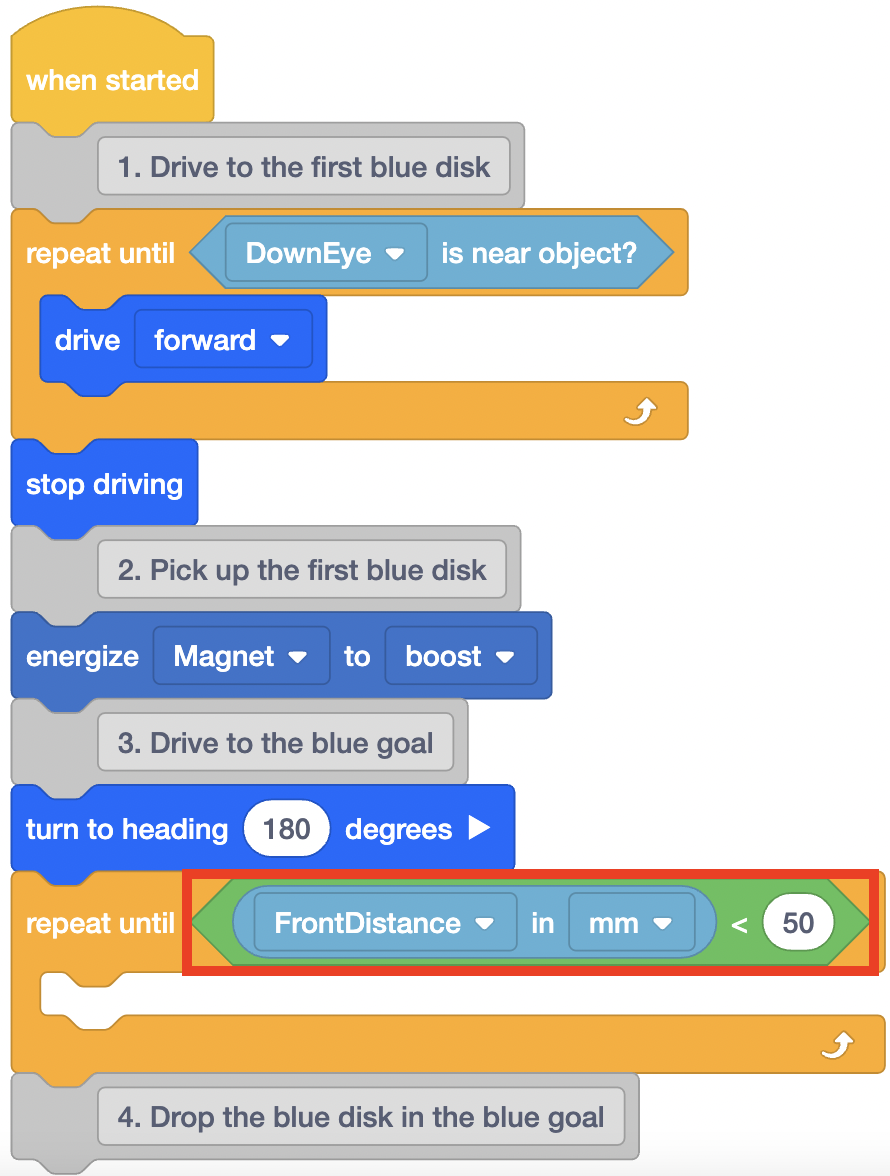
- O Sensor de Distância mede a distância da frente do Robô VR até o objeto mais próximo. Por esse motivo, o robô VR precisará girar 180 graus antes de voltar para a meta azul.
- O Robô VR usará o Sensor de Distância com a parede traseira do Playground para determinar onde soltar o disco. Por esse motivo, o robô VR precisará girar 180 graus antes de voltar para a meta azul.
-
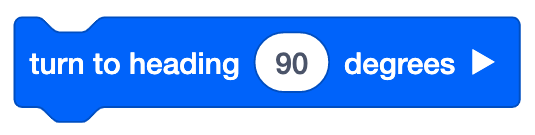
O bloco [Turn to heading] pode ser usado para garantir que o robô VR gire para o cabeçalho correto.
Usando Blocos de Interruptor
Este é o bloco Switch [virar para o cabeçalho]. Você pode modificar o grau da curva alterando o valor numérico entre parênteses. Lembre-se de que o número deve ser escrito antes da unidade de medida (GRAUS), separados por uma vírgula.
Para sua informação
O bloco [Turn to heading] transforma o robô VR em um cabeçalho específico usando o sensor de giroscópio. A direção que o Robô VR irá girar (esquerda ou direita) é determinada com base no rumo atual do sensor Gyro. O bloco [Turn to heading] é usado para direcionar o robô VR para um cabeçalho específico, independentemente da posição do robô VR. À medida que você pega ou solta um disco, o Robô VR pode ficar fora do curso. Usar o bloco [Turn to heading] garante que o Robô VR gire para a posição absoluta em vez de uma posição em relação ao cabeçalho anterior.
-
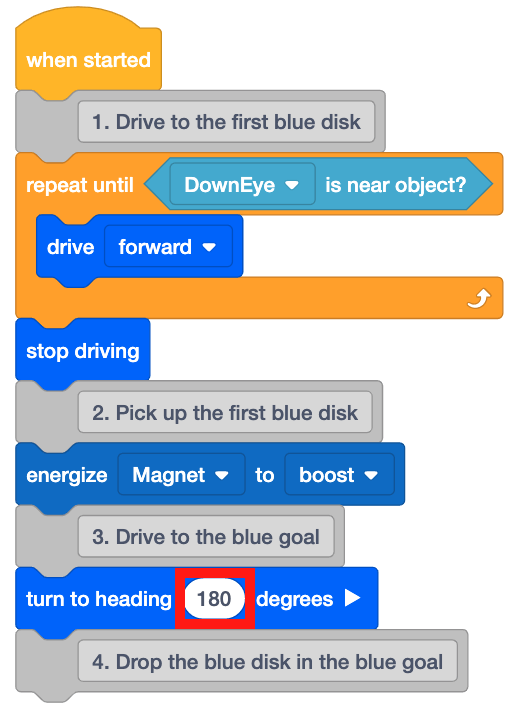
Adicione um bloco [Turn to heading] abaixo do terceiro comentário.

-
Defina o bloco [Turn to heading] para 180 graus.
-
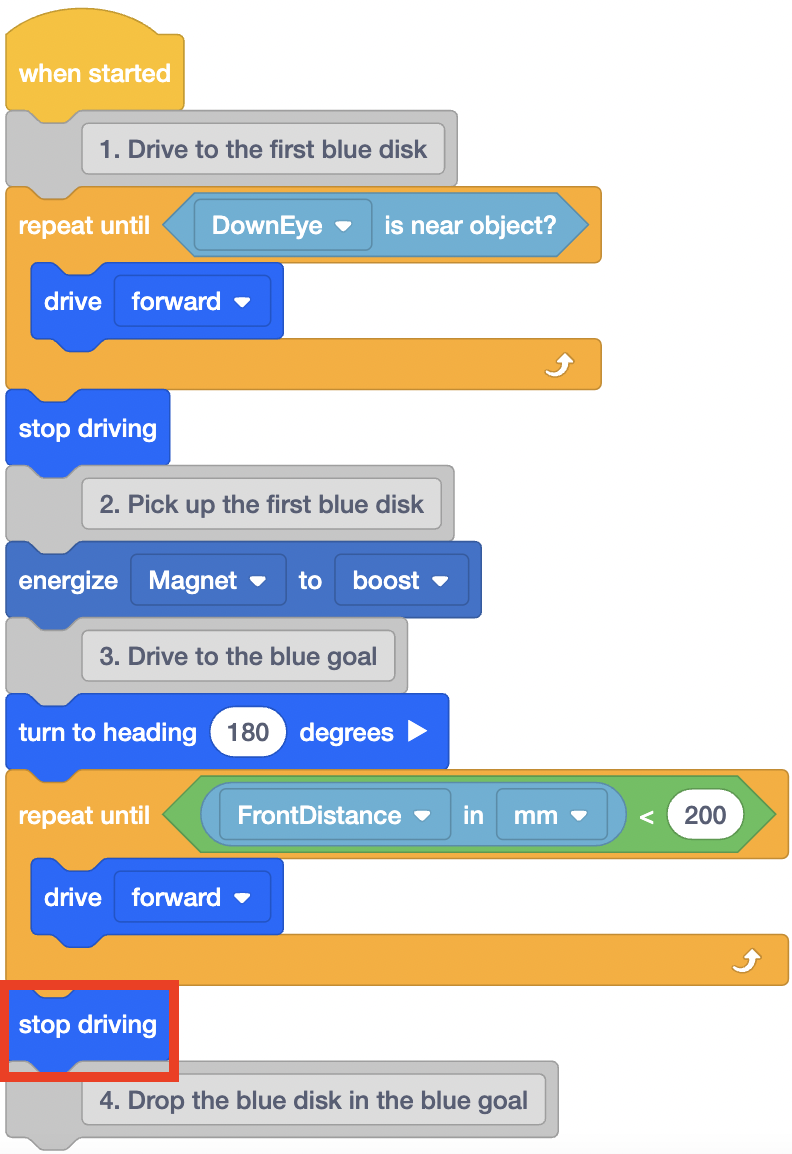
Agora que o Robô VR está orientado para a posição inicial, o Robô VR precisará voltar para a meta azul. Adicione um bloco [Repeat until] abaixo do bloco [Turn to heading].
-
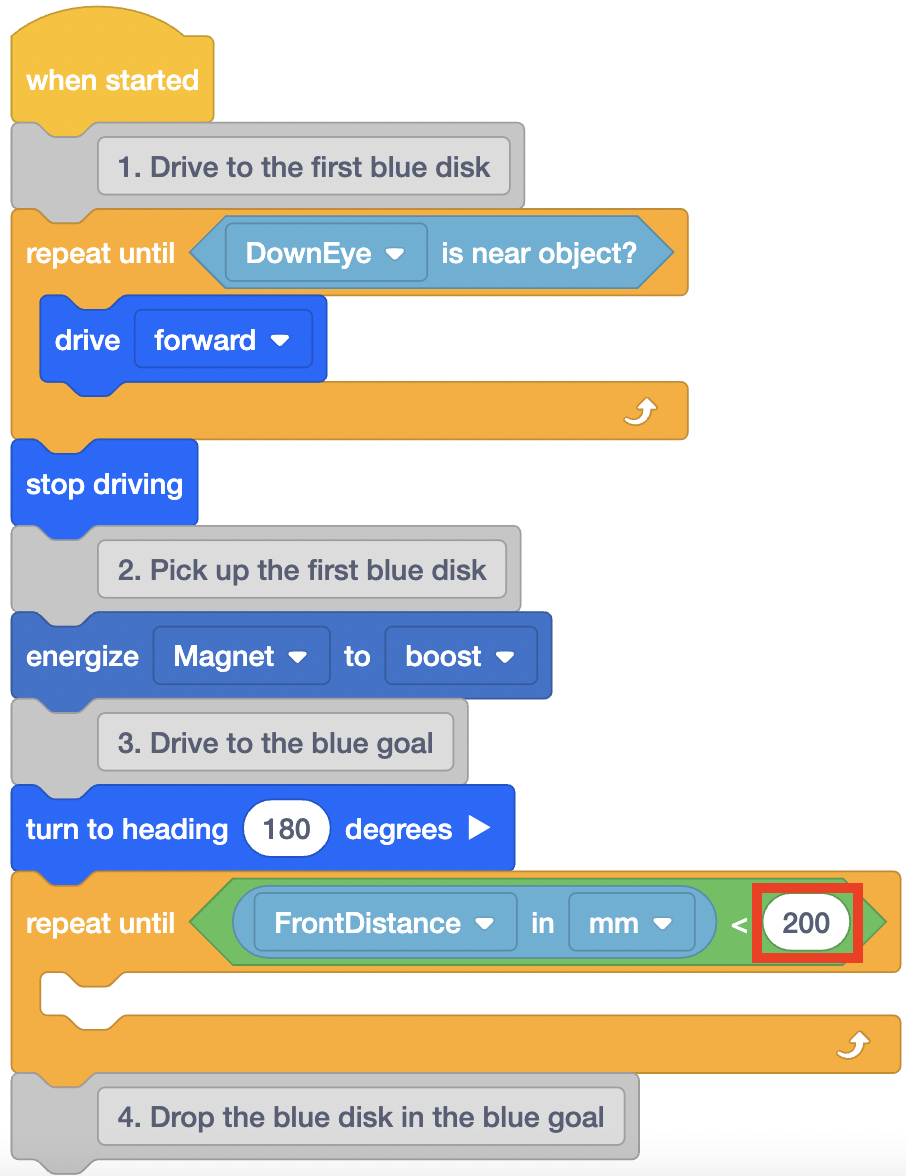
Para voltar à meta azul, o Robô VR usará dados do Sensor de Distância para determinar quando o Robô VR está dentro da meta azul. Conforme discutido na lição anterior, cada quadrado de grade no Playground Disk Mover mede 200 milímetros (mm) por 200 milímetros (mm).

-
Usando essas medidas, o centro da meta azul pode ser determinado como estando a aproximadamente 200 milímetros (mm) da parede do Playground.

-
O Robô VR deve parar de dirigir quando o Sensor de Distância informar que o Robô VR está a menos de 200 milímetros (mm) da parede do Playground. Adicione os seguintes blocos ao bloco [Repeat until].
-
Altere o parâmetro no <Less than> bloco para 200.
-
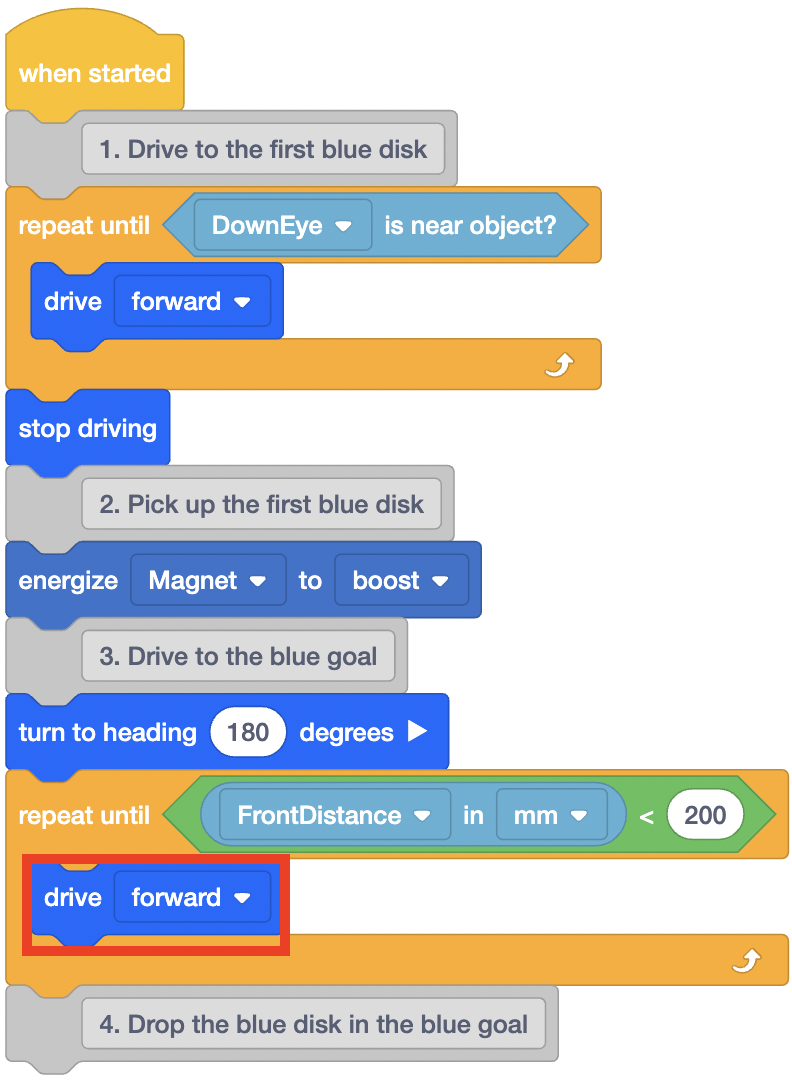
Adicione um bloco [Drive] a este bloco [Repeat until]. Isso instruirá o Robô VR a avançar até que o Sensor de Distância relate uma distância inferior a 200 milímetros (mm).
-
Assim que o Robô VR atingir a meta azul (a 200 mm da parede), o Robô VR precisará parar de dirigir. Adicione um bloco [Stop driving] abaixo do bloco [Repeat until].
-
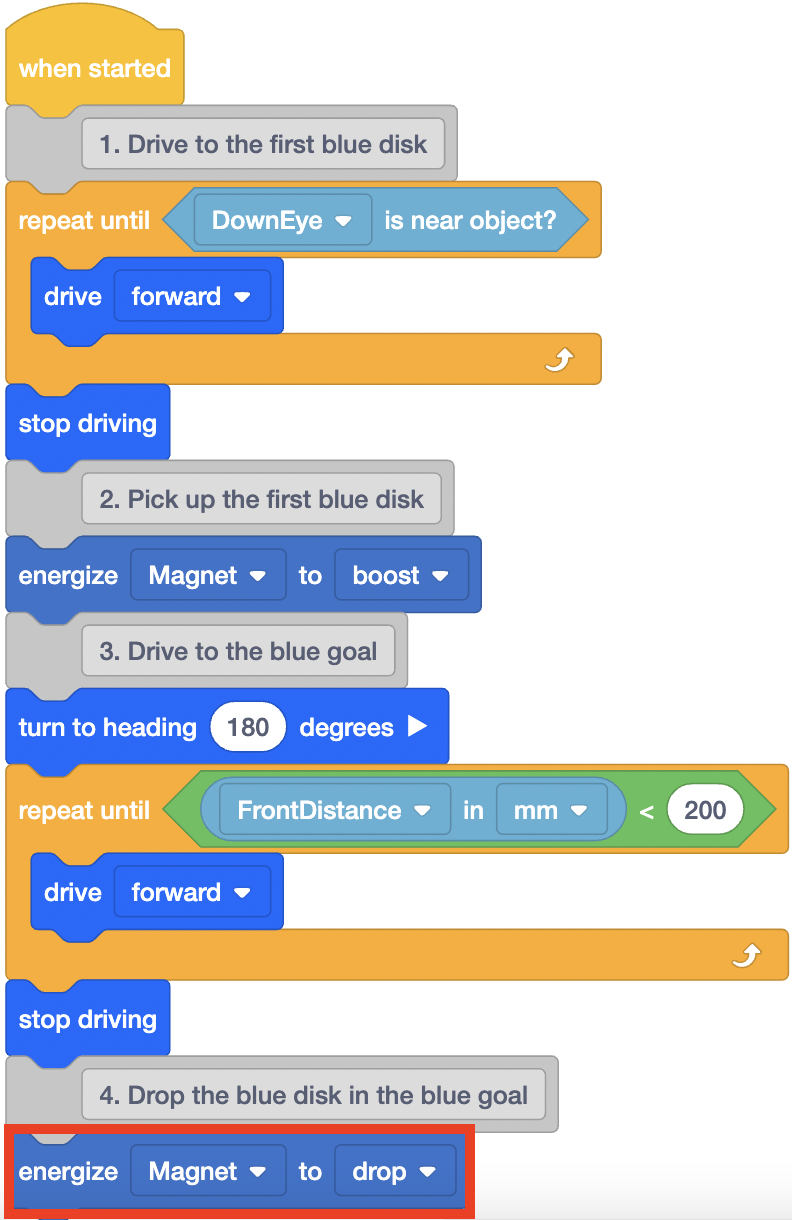
Agora que o robô VR está parado na meta azul, ele pode soltar o disco. Adicione um bloco [Energize Electromagnet] abaixo do quarto comentário e defina o bloco para ‘drop’.
-
O robô VR terá de conduzir em marcha-atrás a uma curta distância para evitar derrubar ou colidir com quaisquer discos. Colidir com um disco pode potencialmente tirar o Robô VR do curso. Adicione os blocos a seguir para instruir o robô VR a dirigir em marcha à ré por 100 milímetros (mm) e voltar para um rumo de 0 graus.

- Abra o Playground do Disk Mover se ainda não estiver aberto e execute o projeto.
-
O robô VR avança, pega o primeiro disco e, em seguida, vira para um rumo de 180 graus para enfrentar a meta azul. O Robô VR então usa os valores do Sensor de Distância para determinar quando parar de dirigir e soltar o disco azul.

- Observe como o segundo bloco [Repetir até] funciona nesta parte do projeto.
- Quando o Sensor de Distância no Robô VR detecta que a parede do Playground está a menos de 200 milímetros (mm) de distância, o projeto passará para o próximo bloco na pilha abaixo do bloco [Repetir até].
- Neste projeto, isso significou que o robô VR para de conduzir e deixa cair o eletroímã na baliza azul.
Selecione o botão Seguinte para continuar com o resto desta lição.