
บทที่ 3: การใช้ข้อเสนอแนะเกี่ยวกับเซ็นเซอร์ที่รายงานเพื่อรับดิสก์
บทเรียนนี้จะใช้รายงานข้อเสนอแนะของเซ็นเซอร์เพื่อแก้ปัญหาความท้าทายเดียวกันกับบทเรียนที่ 2 หุ่นยนต์ VR จะหยิบและย้ายดิสก์สีน้ำเงินอันแรกไปยังเป้าหมายสีน้ำเงิน
-
เริ่มโครงการใหม่ใน VEXcode VR และตั้งชื่อ โครงการUnit8Lesson3

-
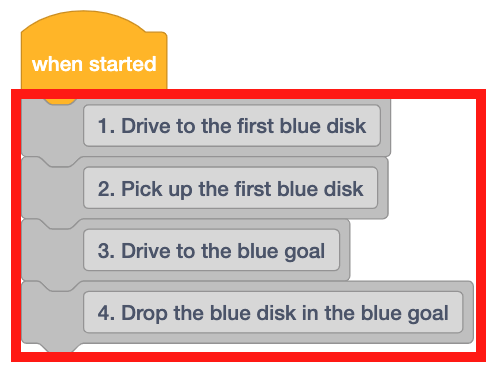
ลากบล็อกความคิดเห็นสี่บล็อกไปยังพื้นที่ทำงาน เพิ่มความคิดเห็นสำหรับแต่ละขั้นตอนที่จำเป็นสำหรับหุ่นยนต์ VR เพื่อขับไปยังดิสก์แรกรับและส่งกลับไปยังเป้าหมายสีน้ำเงิน
-
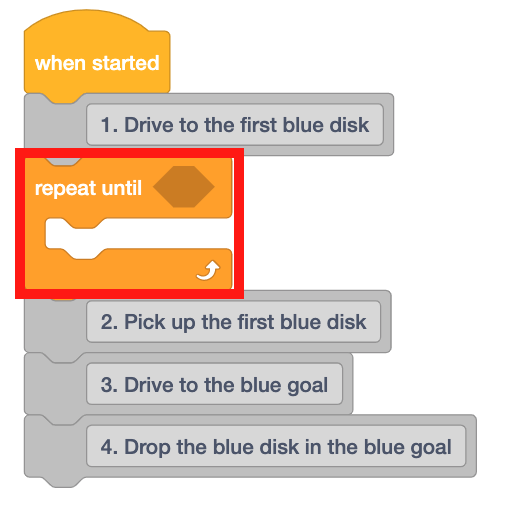
ลากบล็อค [ทำซ้ำจนกว่า] ลงในพื้นที่ทำงานใต้ความคิดเห็นแรก
สำหรับข้อมูลของคุณ
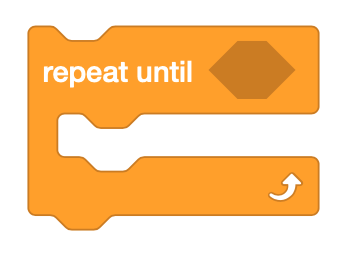
บล็อก [ทำซ้ำจนกว่าจะ] เป็นบล็อก C ที่ยอมรับบล็อกบูลีนรีพอร์ตเตอร์ บล็อก [ทำซ้ำจนกว่า] จะตรวจสอบเงื่อนไขบูลีนที่จุดเริ่มต้นของแต่ละลูปเท่านั้น หากมีการรายงานว่าภาวะบูลีนเป็นเท็จบล็อกด้านในจะทำงาน หากมีการรายงานว่าภาวะบูลีนเป็นจริงบล็อกด้านในจะถูกข้ามไป
-
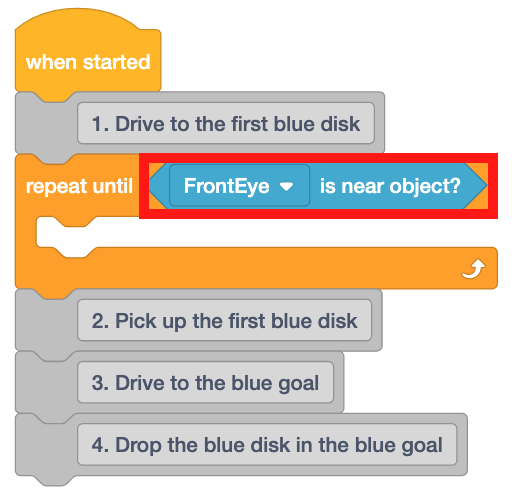
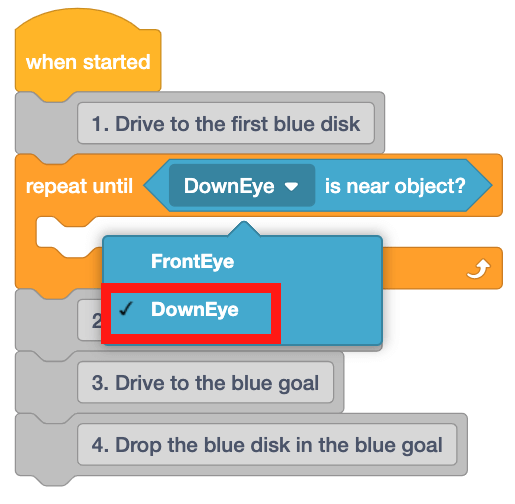
<Eye Sensor near object> บล็อกรายงานความจริงเมื่อ VR Robot ตรวจพบดิสก์สีบน Disk MoverPlayground ลากบล็อคนี้ไปวางในโปรเจกต์
-
ดิสก์บนสนามเด็กเล่น Disk Mover อยู่บนพื้นของสนามเด็กเล่นและไม่สามารถตรวจพบได้โดยเซ็นเซอร์ตาหน้า ด้วยเหตุนี้ให้ตั้งค่า <Eye Sensor near object> บล็อกเป็น ‘DownEye’
-
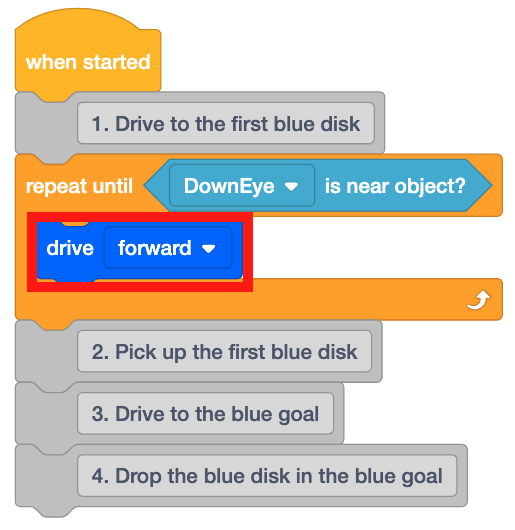
บล็อกที่ด้านในของบล็อก [ทำซ้ำจนกว่า] จะทำงานเมื่อหุ่นยนต์ VR ตรวจไม่พบวัตถุ ในการเข้าถึงหนึ่งในดิสก์หุ่นยนต์ VR จะต้องขับเคลื่อนไปข้างหน้าจนกว่าจะตรวจพบดิสก์

-
ลากบล็อค [Drive] ไปยังบล็อค [Repeat until]
-
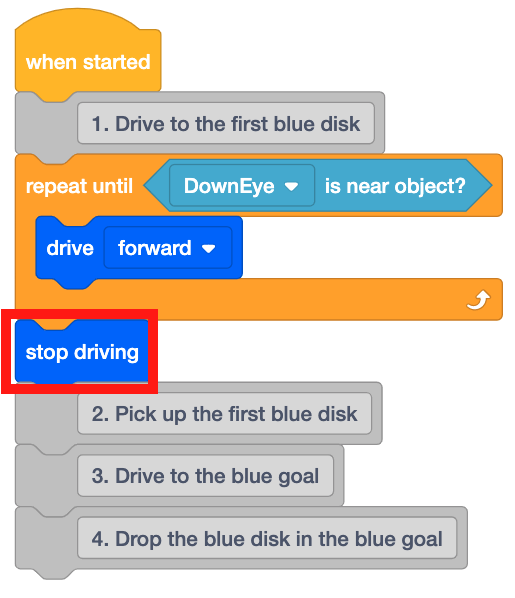
เมื่อตรวจพบดิสก์หุ่นยนต์ VR จะต้องหยุดขับเพื่อรับดิสก์ ลากบล็อค [หยุดขับ] และวางไว้ใต้บล็อค [ทำซ้ำจนกว่าจะถึง]
-
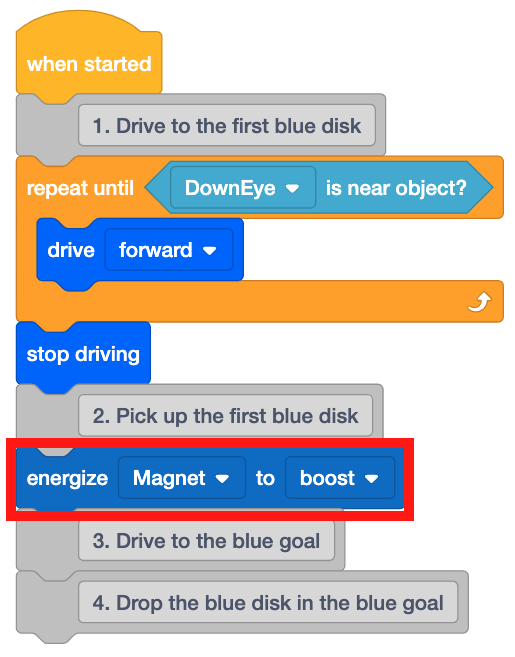
ตอนนี้สั่งให้หุ่นยนต์ VR หยิบดิสก์ด้วยแม่เหล็กไฟฟ้าโดยวางบล็อก [Energize Electromagnet] ไว้ด้านล่างความคิดเห็นที่สอง
- เปิด Disk Mover Playground หากยังไม่ได้เปิดและเรียกใช้โครงการ
-
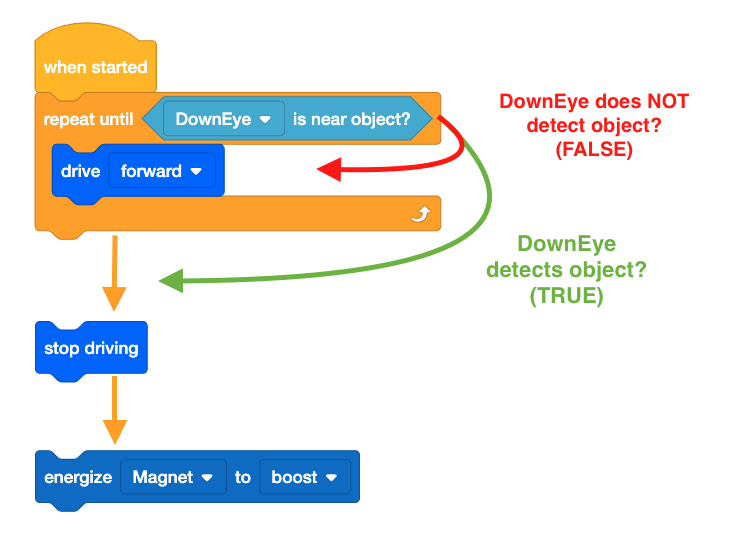
หุ่นยนต์ VR ขับเคลื่อนไปข้างหน้าจนกว่าดิสก์สีน้ำเงินตัวแรกจะถูกตรวจพบโดยเซ็นเซอร์ดวงตาลงหยุดการขับขี่และให้พลังงานแม่เหล็กไฟฟ้าเพื่อรับดิสก์

- สังเกตว่าบล็อค [ทำซ้ำจนกว่า] ทำงานอย่างไรในโปรเจกต์นี้
- เมื่อ Down Eye Sensor บน VR Robot ตรวจพบวัตถุโครงการจะย้ายไปยังบล็อกถัดไปในกองซ้อนด้านล่างบล็อก [ทำซ้ำจนกว่าจะถึง]
- ในโครงการนี้นั่นหมายความว่าหุ่นยนต์ VR หยุดขับและกระตุ้นแม่เหล็กไฟฟ้า
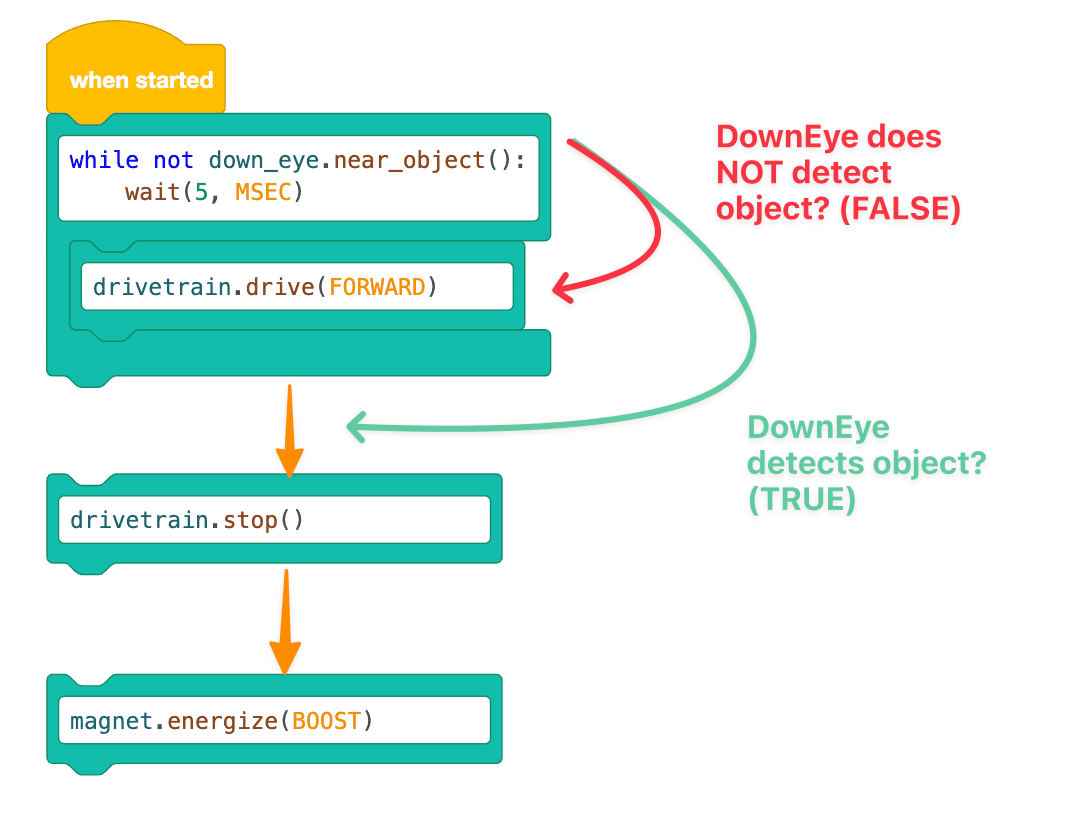
การใช้สวิทช์บล็อก
ภาพด้านล่างแสดงกราฟิกเวิร์กโฟลว์ของบทเรียนนี้โดยใช้บล็อกสวิตช์ การเปรียบเทียบกราฟิกนี้กับกราฟิกข้างต้นจะช่วยให้คุณเข้าใจขั้นตอนการทำงานของคำสั่ง Switch Python ใหม่ที่คุณกำลังเรียนรู้ได้ดียิ่งขึ้น
เลือกปุ่ม ถัดไป เพื่อดำเนินการกับบทเรียนส่วนที่เหลือนี้ต่อไป