
บทเรียนที่ 3: การใช้รายงานผลป้อนกลับของเซ็นเซอร์เพื่อวางดิสก์ในเป้าหมาย
ในบทเรียนที่ 2 หุ่นยนต์ VR ขับรถย้อนกลับไปยังจุดเริ่มต้นเพื่อวางดิสก์ สิ่งนี้กำหนดให้ผู้ใช้คำนวณระยะทางที่แน่นอนสำหรับหุ่นยนต์ VR ในการเดินทาง ซึ่งอาจเป็นไปไม่ได้เสมอไป แต่หุ่นยนต์ VR สามารถใช้ค่าเซ็นเซอร์ที่รายงานเพื่อรับและวางดิสก์ด้วยความแม่นยำที่สม่ำเสมอ
บทที่ 3 ใช้การตอบรับของเซ็นเซอร์ที่รายงานเพื่อกำหนดตำแหน่งที่หุ่นยนต์ VR ควรหยุดขับเมื่อกลับไปที่เป้าหมาย ในการใช้ <Eye Sensor near object> บล็อกก่อนหน้านี้ในบทเรียนนี้ไม่จำเป็นต้องทราบระยะห่างจากเป้าหมายไปยังแต่ละดิสก์

หุ่นยนต์ VR จะขับรถกลับไปยังเป้าหมายสีน้ำเงินโดยใช้ข้อมูลจากเซ็นเซอร์ระยะทางเพื่อกำหนดตำแหน่งที่จะหยุดการขับขี่ เมื่อหุ่นยนต์ VR หยุดทำงานภายในเป้าหมายสีน้ำเงินหุ่นยนต์ VR จะวางดิสก์สีน้ำเงิน
- ทำงานต่อ ใน โครงการ Unit8Lesson3
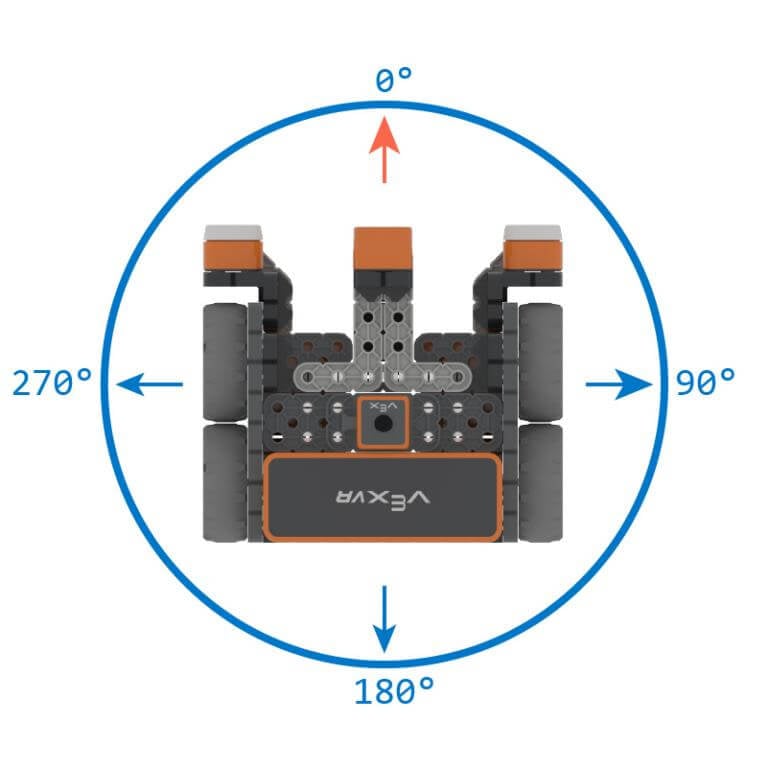
- เซ็นเซอร์วัดระยะทางวัดระยะทางจากด้านหน้าของหุ่นยนต์ VR ไปยังวัตถุที่ใกล้ที่สุด ด้วยเหตุนี้หุ่นยนต์ VR จะต้องหมุนรอบ 180 องศาก่อนที่จะขับกลับไปยังเป้าหมายสีน้ำเงิน
- หุ่นยนต์ VR จะใช้เซ็นเซอร์ระยะทางกับผนังด้านหลังของสนามเด็กเล่นเพื่อกำหนดตำแหน่งที่จะวางดิสก์ ด้วยเหตุนี้หุ่นยนต์ VR จะต้องหมุนรอบ 180 องศาก่อนที่จะขับกลับไปยังเป้าหมายสีน้ำเงิน
-
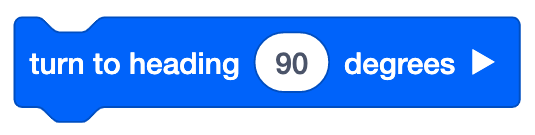
บล็อก [Turn to heading] สามารถใช้เพื่อให้แน่ใจว่าหุ่นยนต์ VR หันไปยังหัวข้อที่ถูกต้อง
การใช้สวิทช์บล็อก
นี่คือบล็อค Switch [turn to heading] คุณสามารถปรับเปลี่ยนระดับของเทิร์นได้โดยการเปลี่ยนค่าตัวเลขในวงเล็บ โปรดจำไว้ว่าต้องเขียนตัวเลขก่อนหน่วยการวัด (องศา) คั่นด้วยเครื่องหมายจุลภาค

สำหรับข้อมูลของคุณ
บล็อก [Turn to heading] จะเปลี่ยนหุ่นยนต์ VR ไปยังหัวข้อเฉพาะโดยใช้เซ็นเซอร์ Gyro ทิศทางที่หุ่นยนต์ VR จะหมุน (ซ้ายหรือขวา) จะถูกกำหนดตามส่วนหัวปัจจุบันของเซ็นเซอร์ Gyro บล็อก [Turn to heading] ใช้เพื่อนำหุ่นยนต์ VR ไปยังหัวข้อเฉพาะโดยไม่คำนึงถึงตำแหน่งของหุ่นยนต์ VR ในขณะที่คุณหยิบหรือวางดิสก์หุ่นยนต์ VR อาจถูกเคาะออกนอกเส้นทาง การใช้บล็อก [Turn to heading] ช่วยให้มั่นใจได้ว่าหุ่นยนต์ VR จะหมุนไปยังตำแหน่งสัมบูรณ์แทนที่จะเป็นตำแหน่งที่สัมพันธ์กับหัวข้อก่อนหน้า
-
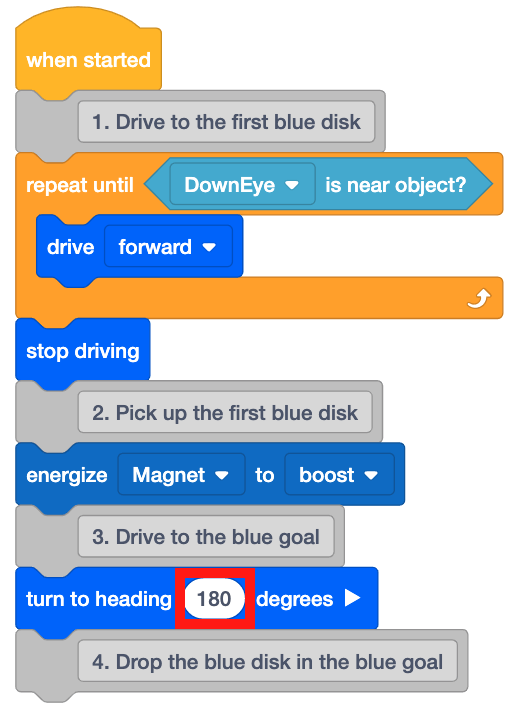
เพิ่มบล็อก [Turn to heading] ใต้ความคิดเห็นที่สาม

-
ตั้งบล็อค [Turn to heading] ไว้ที่ 180 องศา
-
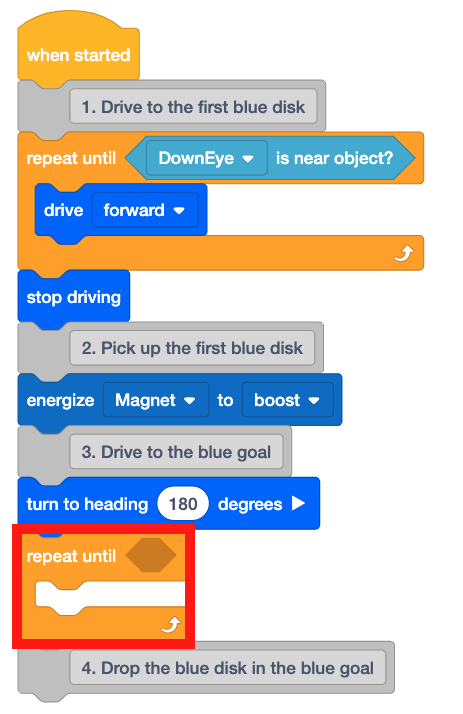
ตอนนี้หุ่นยนต์ VR อยู่ในตำแหน่งเริ่มต้นแล้วหุ่นยนต์ VR จะต้องขับกลับไปที่เป้าหมายสีน้ำเงิน เพิ่มบล็อค [ทำซ้ำจนกว่า] ใต้บล็อค [Turn to heading]
-
ในการขับรถกลับไปยังเป้าหมายสีน้ำเงินหุ่นยนต์ VR จะใช้ข้อมูลจากเซ็นเซอร์ระยะทางเพื่อกำหนดว่าเมื่อใดที่หุ่นยนต์ VR อยู่ภายในเป้าหมายสีน้ำเงิน ตามที่กล่าวไว้ในบทเรียนก่อนหน้าตารางสี่เหลี่ยมแต่ละตารางบน Disk Mover Playground มี ขนาด 200 มิลลิเมตร (มม.) 200 มิลลิเมตร (มม.)

-
โดยใช้การวัดเหล่านั้นศูนย์กลางของเป้าหมายสีน้ำเงินสามารถกำหนดได้ประมาณ 200 มิลลิเมตร (มม.) จากผนังของสนามเด็กเล่น Using those measurements, the center of the blue goal can be determined to approximately 200 mm (mm) from the wall of the Playground.

-
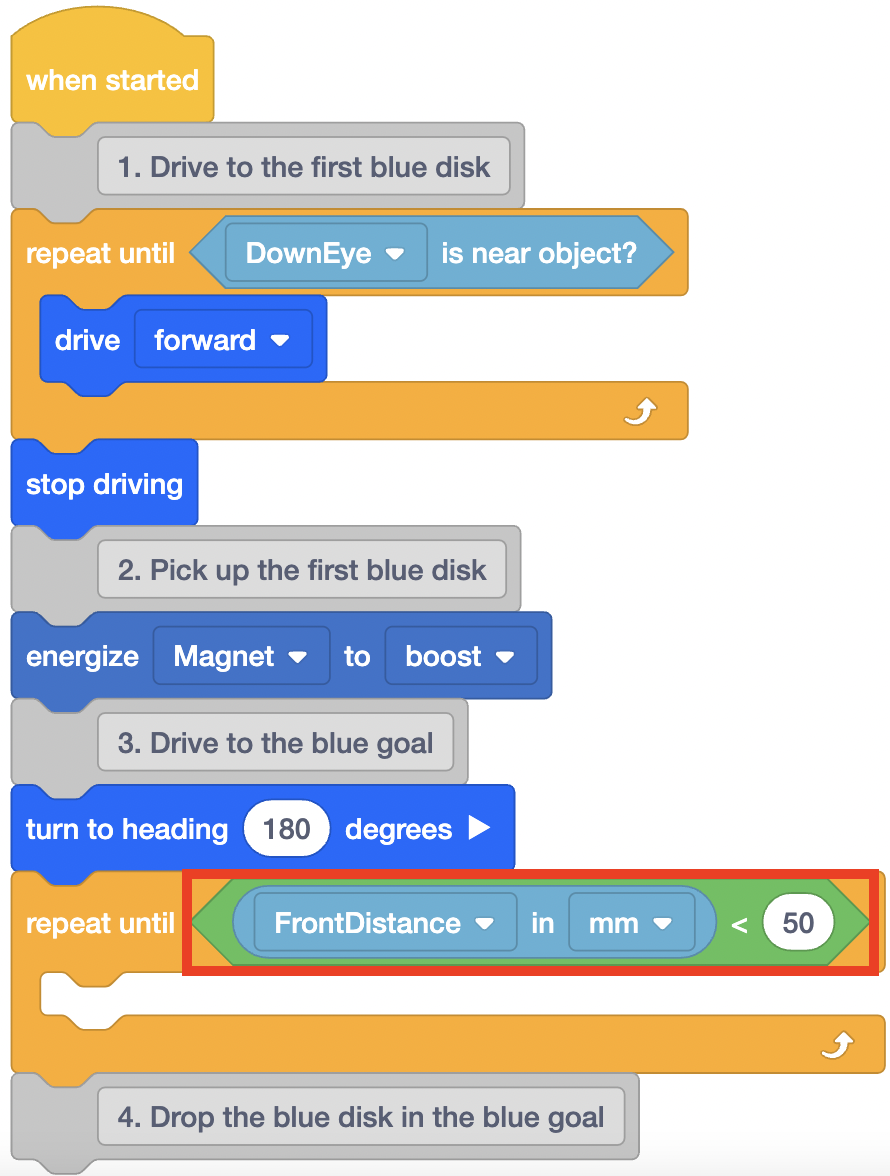
หุ่นยนต์ VR ควรหยุดขับเมื่อเซ็นเซอร์ระยะทางรายงานว่าหุ่นยนต์ VR อยู่ห่างจากผนังของสนามเด็กเล่นน้อยกว่า 200 มิลลิเมตร (มม.) เพิ่มบล็อกต่อไปนี้ลงในบล็อก [ทำซ้ำจนกว่า]
-
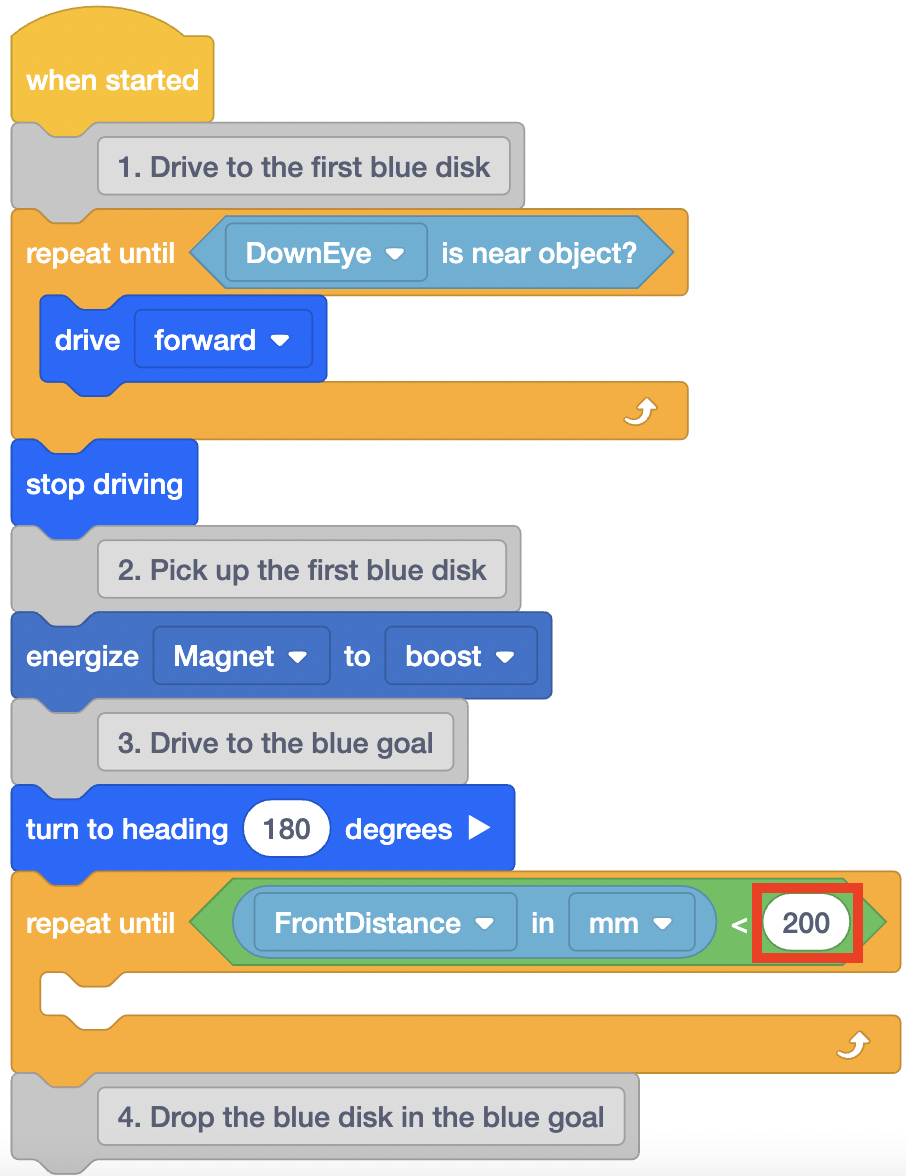
เปลี่ยนพารามิเตอร์ใน <Less than> บล็อกเป็น 200
-
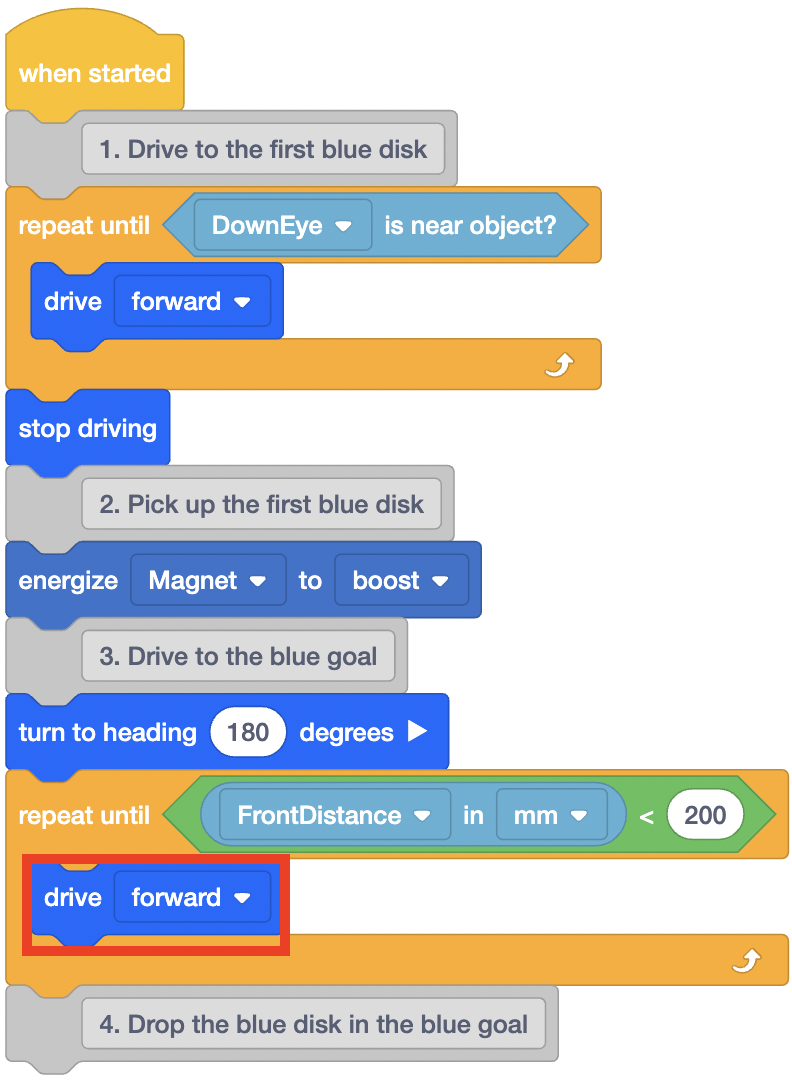
เพิ่มบล็อค [Drive] ลงในบล็อค [Repeat until] นี้ สิ่งนี้จะสั่งให้หุ่นยนต์ VR ขับไปข้างหน้าจนกว่าเซ็นเซอร์ระยะทางจะรายงานระยะทางน้อยกว่า 200 มิลลิเมตร (มม.)
-
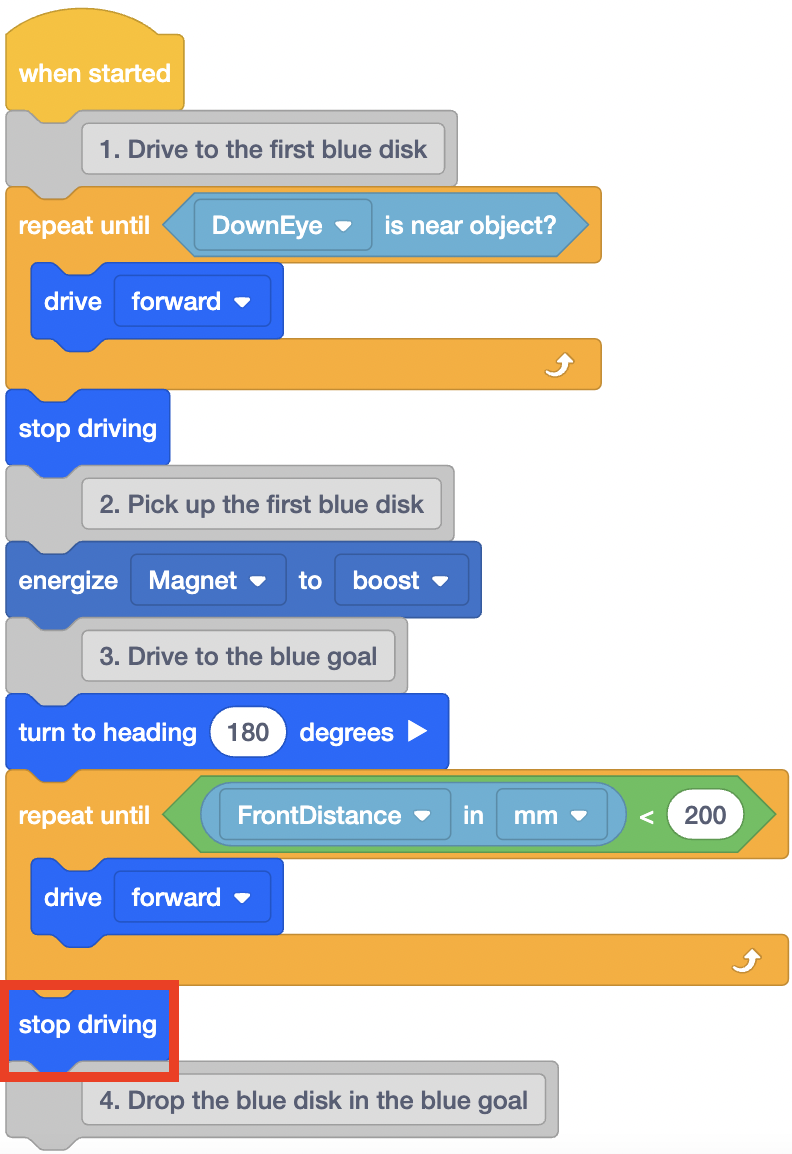
เมื่อหุ่นยนต์ VR ถึงเป้าหมายสีน้ำเงิน (200 มม. จากผนัง) หุ่นยนต์ VR จะต้องหยุดการขับขี่ เพิ่มบล็อค [หยุดขับ] ใต้บล็อค [ทำซ้ำจนกว่าจะถึง]
-
ตอนนี้หุ่นยนต์ VR หยุดทำงานในเป้าหมายสีน้ำเงินแล้วมันสามารถวางดิสก์ได้ เพิ่มบล็อก [Energize Electromagnet] ใต้ความคิดเห็นที่สี่และตั้งค่าบล็อกเป็น ‘drop’
-
หุ่นยนต์ VR จะต้องขับรถในระยะทางสั้นๆเพื่อหลีกเลี่ยงการชนหรือชนกับดิสก์ใดๆ การชนกับดิสก์อาจทำให้หุ่นยนต์ VR หลุดออกจากเส้นทางได้ เพิ่มบล็อกต่อไปนี้เพื่อสั่งให้หุ่นยนต์ VR ขับรถย้อนกลับเป็นเวลา 100 มิลลิเมตร (มม.) และหันกลับไปที่หัวเรื่อง 0 องศา

- เปิด Disk Mover Playground หากยังไม่ได้เปิดและเรียกใช้โครงการ
-
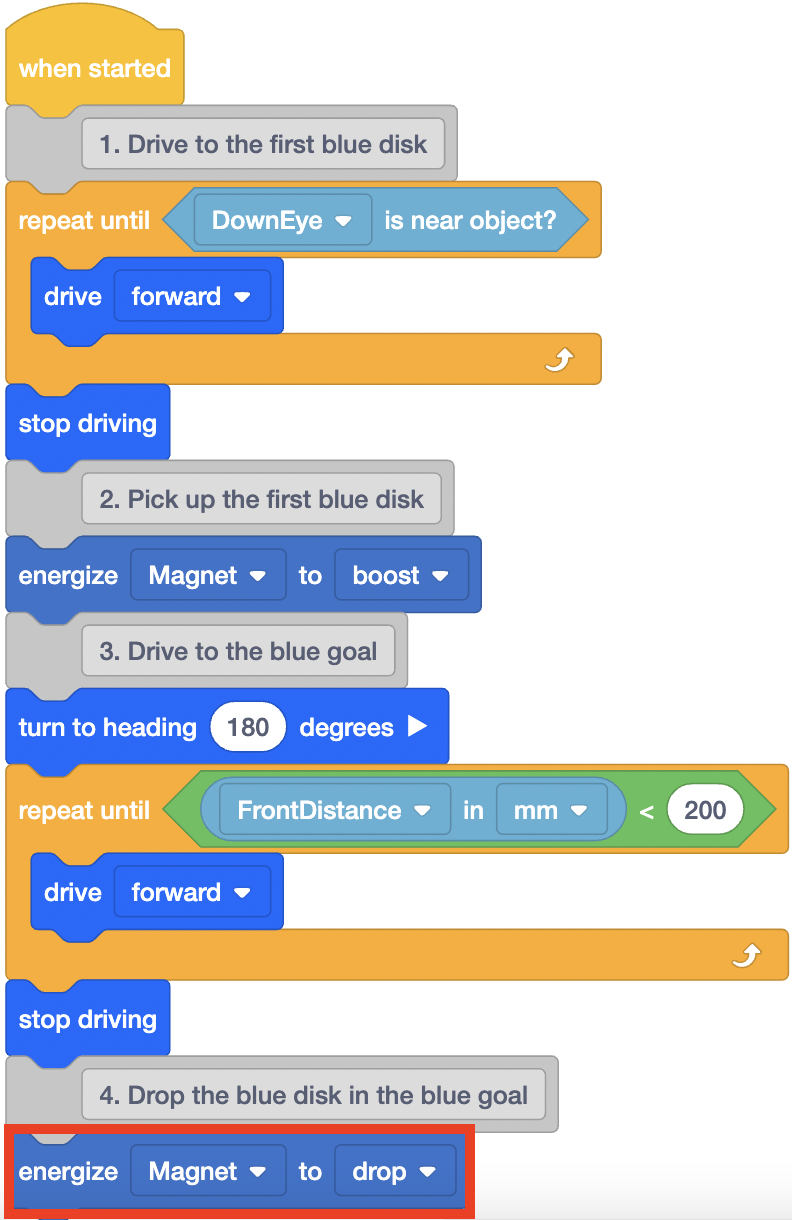
หุ่นยนต์ VR ขับเคลื่อนไปข้างหน้าหยิบดิสก์ตัวแรกขึ้นมาจากนั้นหันไปที่ส่วนหัว 180 องศาเพื่อเผชิญกับเป้าหมายสีน้ำเงิน จากนั้นหุ่นยนต์ VR จะใช้ค่าจากเซ็นเซอร์ระยะทางเพื่อกำหนดเวลาที่จะหยุดการขับขี่และวางดิสก์สีน้ำเงิน

- สังเกตว่าฟังก์ชัน [ทำซ้ำจนกว่า] บล็อกที่สองในส่วนนี้ของโครงการอย่างไร
- เมื่อเซ็นเซอร์ระยะทางบนหุ่นยนต์ VR ตรวจพบว่าผนังของสนามเด็กเล่นอยู่ห่างออกไปน้อยกว่า 200 มิลลิเมตร (มม.) โครงการจะย้ายไปยังบล็อกถัดไปในกองซ้อนด้านล่างบล็อก [ทำซ้ำจนกว่าจะถึง]
- ในโครงการนี้นั่นหมายความว่าหุ่นยนต์ VR จะหยุดขับและปล่อยแม่เหล็กไฟฟ้าลงในเป้าหมายสีน้ำเงิน
เลือกปุ่ม ถัดไป เพื่อดำเนินการกับบทเรียนส่วนที่เหลือนี้ต่อไป