ขึ้นและเหนือ
6 บทเรียน
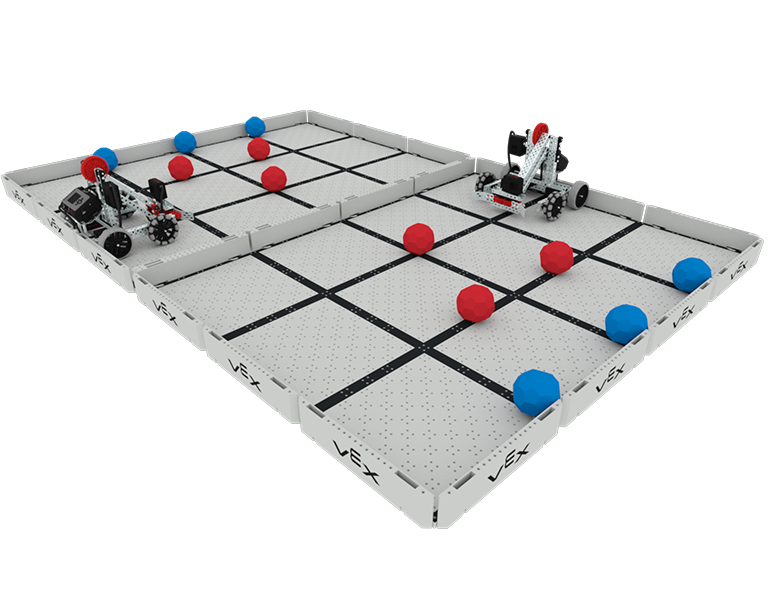
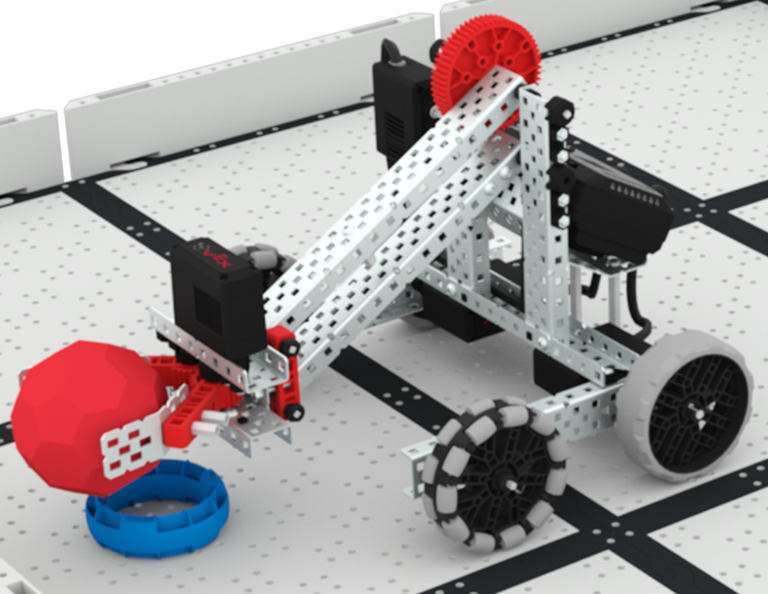
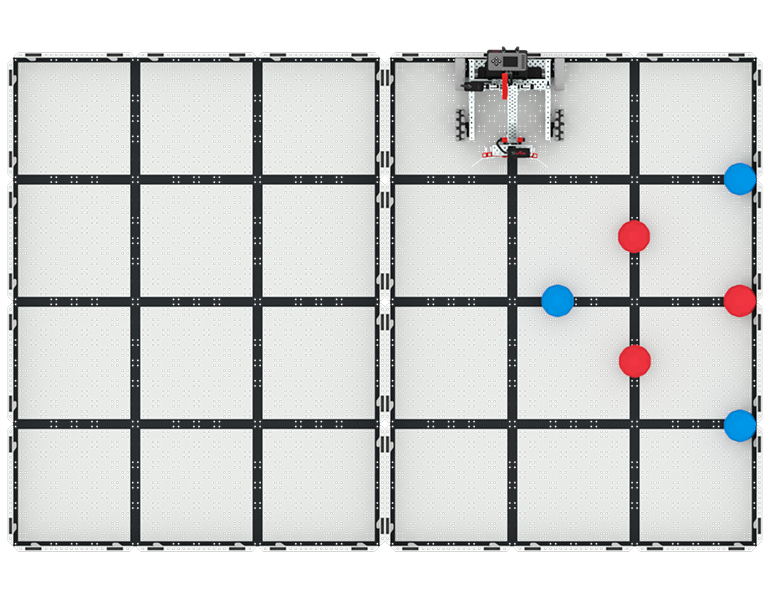
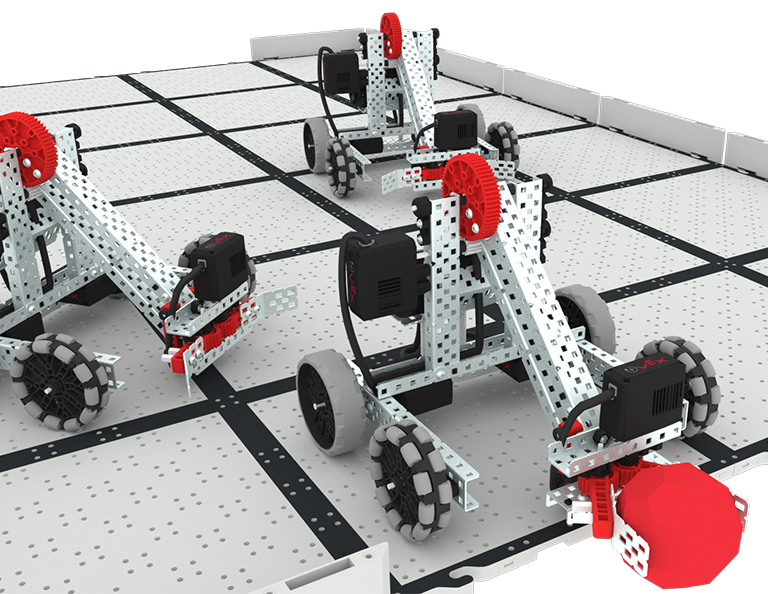
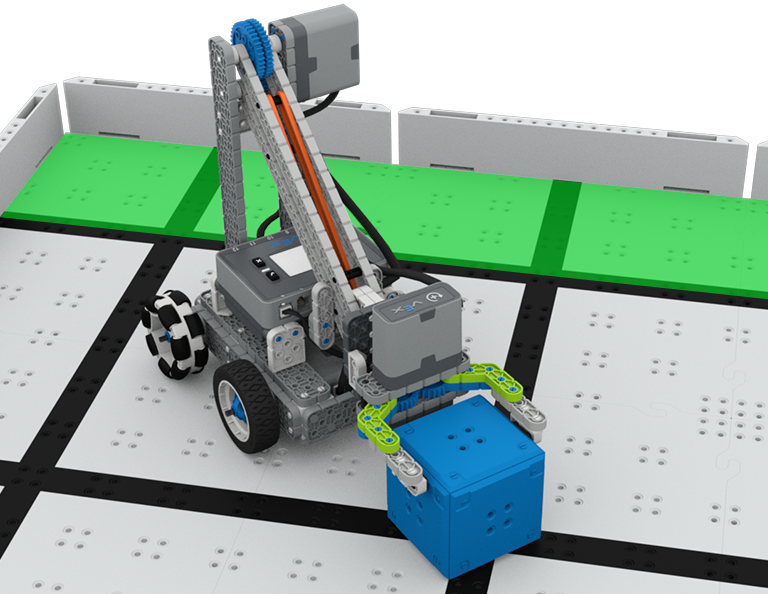
ในบทนี้ คุณจะได้สำรวจวิธีการออกแบบ Clawbot เพื่อรวบรวม หยิบ และย้าย Buckyballs จากด้านหนึ่งของสนามไปยังอีกด้านหนึ่ง ในการแข่งขัน Up and Over!
เยี่ยมชมพอร์ทัลของครูเพื่อดูสื่อและวิดีโอสนับสนุนครูเกี่ยวกับเนื้อหาและการอำนวยความสะดวกของบทเรียน Up and Over
บทที่ 1: บทนำ
ในบทเรียนนี้คุณจะได้รับการแนะนำให้รู้จักกับการแข่งขัน Up and Over ตั้งค่าแบตเตอรี่และคอนโทรลเลอร์เตรียมพร้อมที่จะเขียนโค้ดและสร้าง Clawbot
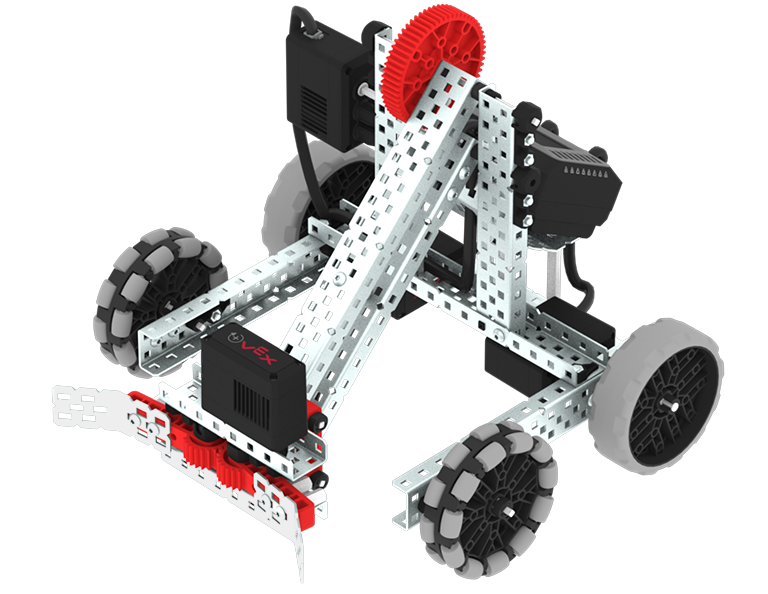
บทที่ 2: การออกแบบกรงเล็บ
ในบทเรียนนี้คุณจะได้เรียนรู้ว่ากรงเล็บคืออะไรกรงเล็บที่มีประสิทธิภาพทำงานอย่างไรและการสอดแนมจะเป็นประโยชน์ต่อการออกแบบและกลยุทธ์ของทีมของคุณอย่างไร จากนั้นคุณจะนำสิ่งที่คุณได้เรียนรู้ไปใช้ในการท้าทาย Grab and Go
บทที่ 3: การออกแบบแขน
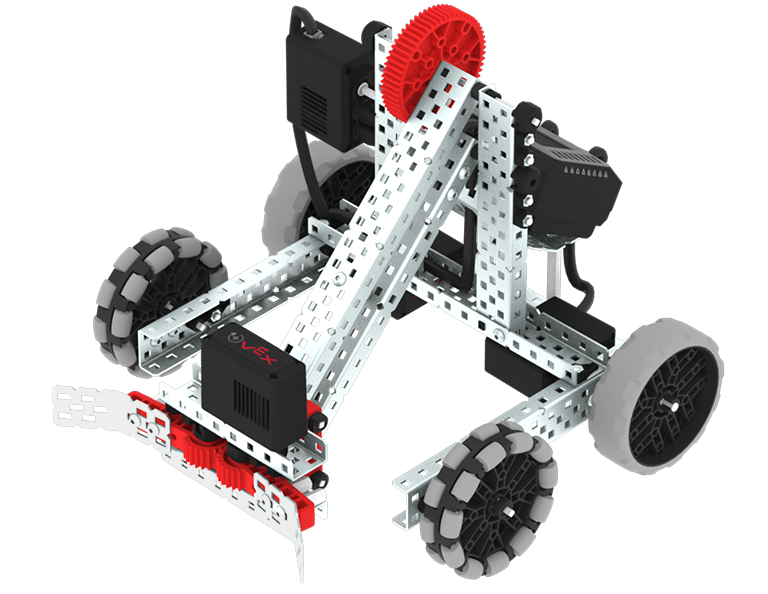
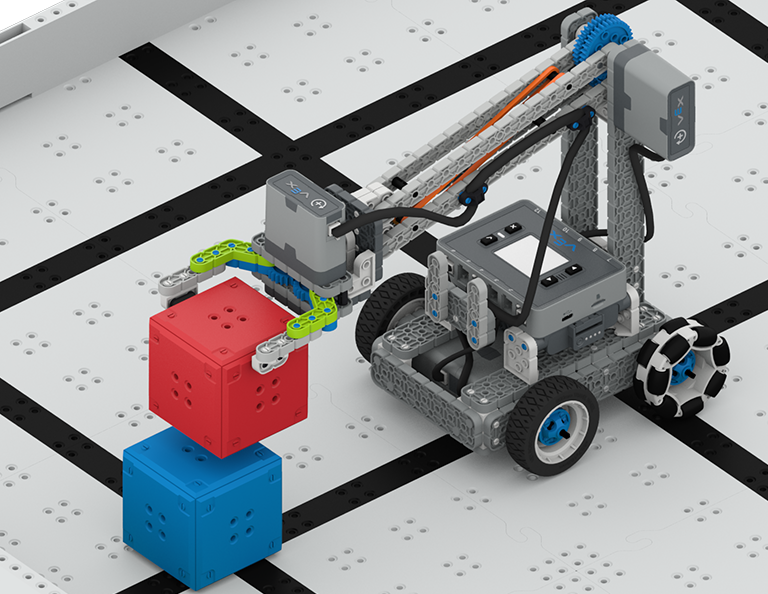
ในบทเรียนนี้ท่านจะได้เรียนรู้เกี่ยวกับองค์ประกอบต่างๆของแขนหุ่นยนต์รวมถึงวิธีการทำงานและสิ่งที่ทำให้การออกแบบแขนมีประสิทธิภาพ จากนั้นคุณจะออกแบบและสร้างแขนให้หุ่นยนต์ของคุณซ้อนบัคกี้บอลในวงแหวนสำหรับการท้าทายแบบซ้อนกัน
บทเรียนที่ 4: กลุ่มมอเตอร์
ในบทเรียนนี้คุณจะได้เรียนรู้ว่ากลุ่มมอเตอร์คืออะไรมีประโยชน์อย่างไรและวิธีการกำหนดค่ากลุ่มมอเตอร์ใน VEXcode EXP เพื่อทำซ้ำบนหุ่นยนต์ของคุณเพื่อทำการท้าทาย Up and Over ให้เสร็จสมบูรณ์
บทที่ 5: การแข่งขันที่สูงขึ้นเรื่อยๆ
ในบทเรียนนี้คุณจะใช้การเรียนรู้ของคุณจากบทเรียนก่อนหน้านี้เพื่อแข่งขันในการแข่งขันขึ้นและลง!

บทที่ 6: บทสรุป
ในบทเรียนนี้คุณจะได้ทบทวนหน่วยและระบุความเชื่อมโยงระหว่างสิ่งที่คุณทำกับอาชีพ STEM
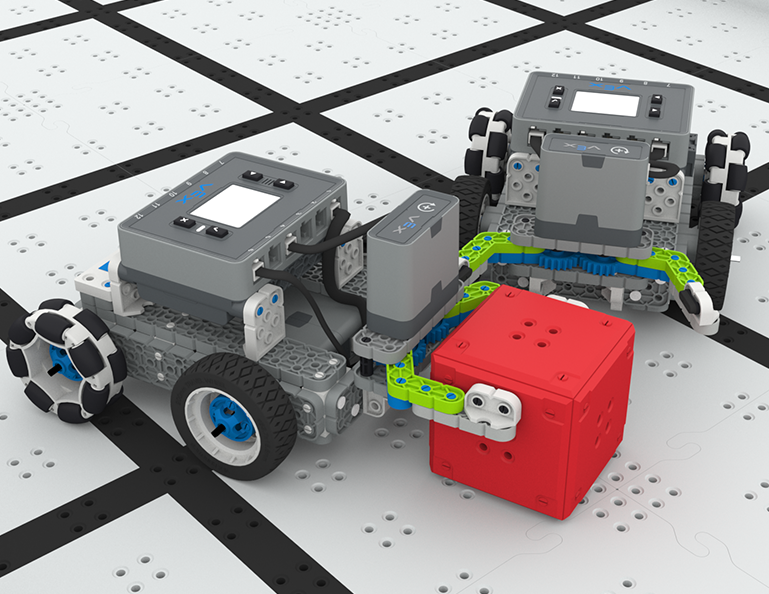
หุ่นยนต์ฟุตบอล
4 บทเรียน
ในหน่วยการเรียนรู้นี้ คุณจะได้สำรวจวิธีสร้างหุ่นยนต์ควบคุมบนหุ่นยนต์ของคุณเพื่อคว้า ส่ง และทำประตูให้ได้มากที่สุดในฐานะนักฟุตบอลหุ่นยนต์ในการแข่งขัน Robot Soccer!
ไปที่พอร์ทัลครูเพื่อดูสื่อและวิดีโอสนับสนุนครูเกี่ยวกับเนื้อหาและการอำนวยความสะดวกของ Robot Soccer Lessons
บทที่ 1: บทนำ
ในบทเรียนนี้คุณจะต้องสร้าง Clawbot ชาร์จตัวควบคุมและแบตเตอรี่ของคุณและเตรียมพร้อมที่จะเขียนโค้ด

บทที่ 2: ผู้บงการ
ในบทเรียนนี้คุณจะได้เรียนรู้เกี่ยวกับตัวจัดการแบบพาสซีฟและแอคทีฟและการออกแบบไอดีเพื่อทำซ้ำในการออกแบบหุ่นยนต์ของคุณและแข่งขันในการท้าทายหุ่นยนต์ฟุตบอลแบบตัวต่อตัว!
บทที่ 3: การแข่งขันหุ่นยนต์ฟุตบอล
ในบทเรียนนี้คุณจะใช้การเรียนรู้ของคุณจากบทเรียนก่อนหน้านี้เพื่อแข่งขันในการแข่งขัน Robot Soccer!
บทที่ 4: บทสรุป
ในบทเรียนนี้คุณจะได้ทบทวนหน่วยและระบุความเชื่อมโยงระหว่างสิ่งที่คุณทำกับอาชีพ STEM ที่เชื่อมโยงกัน

ขึ้นและเหนือ
6 บทเรียน
ในหน่วยการเรียนรู้นี้ คุณจะได้สำรวจวิธีการออกแบบ Clawbot เพื่อรวบรวม หยิบ และย้ายลูกบาศก์จากด้านหนึ่งของสนามไปยังอีกด้านหนึ่ง ในการแข่งขัน Up and Over!
เยี่ยมชมพอร์ทัลของครูเพื่อดูสื่อและวิดีโอสนับสนุนครูเกี่ยวกับเนื้อหาและการอำนวยความสะดวกของบทเรียน Up and Over

บทที่ 1: บทนำ
ในบทเรียนนี้คุณจะได้รับการแนะนำให้รู้จักกับการแข่งขัน Up and Over ตั้งค่าแบตเตอรี่และคอนโทรลเลอร์เตรียมพร้อมที่จะเขียนโค้ดและสร้าง Clawbot
บทที่ 2: การออกแบบกรงเล็บ
ในบทเรียนนี้คุณจะได้เรียนรู้ว่ากรงเล็บคืออะไรกรงเล็บที่มีประสิทธิภาพทำงานอย่างไรและการสอดแนมจะเป็นประโยชน์ต่อการออกแบบและกลยุทธ์ของทีมของคุณอย่างไร จากนั้นคุณจะนำสิ่งที่คุณได้เรียนรู้ไปใช้ในการท้าทาย Grab and Go
บทที่ 3: การออกแบบแขน
ในบทเรียนนี้คุณจะได้เรียนรู้เกี่ยวกับองค์ประกอบต่างๆของแขนหุ่นยนต์วิธีการทำงานและสิ่งที่ทำให้การออกแบบแขนมีประสิทธิภาพเพื่อที่จะเรียงซ้อนลูกบาศก์ให้มากที่สุดเท่าที่จะทำได้ภายในหนึ่งนาทีในการท้าทายแบบเรียงซ้อน
บทเรียนที่ 4: กลุ่มมอเตอร์
ในบทเรียนนี้คุณจะได้เรียนรู้ว่ากลุ่มมอเตอร์คืออะไรมีประโยชน์อย่างไรและวิธีการกำหนดค่ากลุ่มมอเตอร์ใน VEXcode IQ เพื่อทำซ้ำบนหุ่นยนต์ของคุณเพื่อทำการท้าทาย Up and Over ให้เสร็จสมบูรณ์
บทที่ 5: การแข่งขันที่สูงขึ้นเรื่อยๆ
ในบทเรียนนี้คุณจะใช้การเรียนรู้ของคุณจากบทเรียนก่อนหน้านี้เพื่อแข่งขันในการแข่งขันขึ้นและลง!

บทที่ 6: บทสรุป
ในบทเรียนนี้คุณจะได้ทบทวนหน่วยและระบุความเชื่อมโยงระหว่างสิ่งที่คุณทำกับอาชีพ STEM
หุ่นยนต์ฟุตบอล
4 บทเรียน
ในหน่วยการเรียนรู้นี้ คุณจะได้สำรวจวิธีสร้างหุ่นยนต์ควบคุมบนหุ่นยนต์ของคุณเพื่อคว้า ส่ง และทำประตูให้มากที่สุดในฐานะนักฟุตบอลหุ่นยนต์ในการแข่งขัน Robot Soccer!
ไปที่พอร์ทัลครูเพื่อดูสื่อและวิดีโอสนับสนุนครูเกี่ยวกับเนื้อหาและการอำนวยความสะดวกของ Robot Soccer Lessons
บทที่ 1: บทนำ
ในบทเรียนนี้ คุณจะสร้าง Simple Clawbot ชาร์จคอนโทรลเลอร์และแบตเตอรี่ และเตรียมพร้อมสำหรับการเขียนโค้ด
บทที่ 2: หุ่นยนต์
ในบทนี้ คุณจะได้เรียนรู้เกี่ยวกับอุปกรณ์ควบคุมแบบพาสซีฟและแอคทีฟและการออกแบบทางเข้า เพื่อทำซ้ำการออกแบบหุ่นยนต์ของคุณและแข่งขันในความท้าทายของ Robot Soccer แบบตัวต่อตัว!
บทที่ 3: การแข่งขันหุ่นยนต์ฟุตบอล
ในบทเรียนนี้คุณจะใช้การเรียนรู้ของคุณจากบทเรียนก่อนหน้านี้เพื่อแข่งขันในการแข่งขัน Robot Soccer!
บทที่ 4: บทสรุป
ในบทเรียนนี้คุณจะได้ทบทวนหน่วยและระบุความเชื่อมโยงระหว่างสิ่งที่คุณทำกับอาชีพ STEM ที่เชื่อมโยงกัน

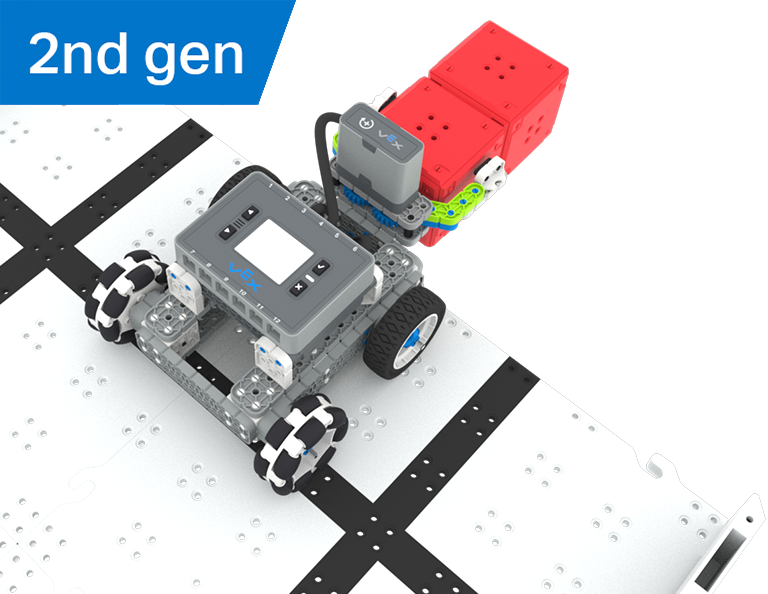
นักสะสมคิวบ์
6 บทเรียน
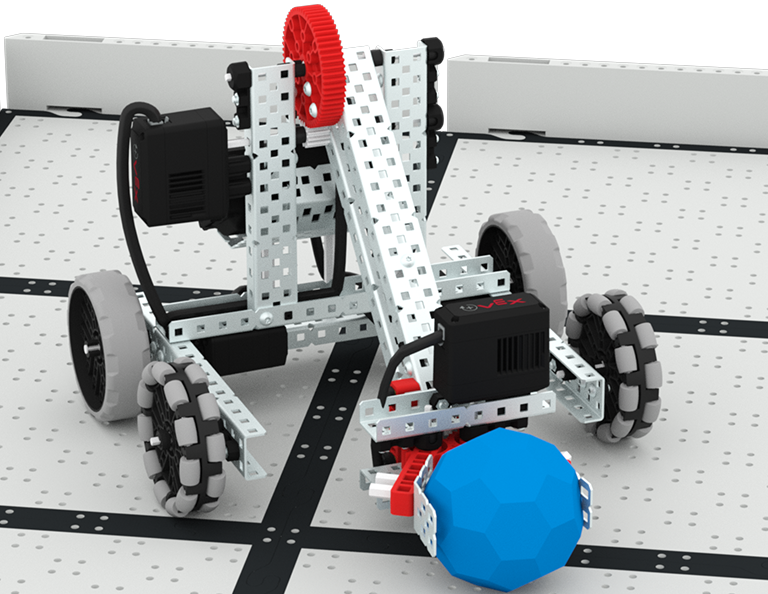
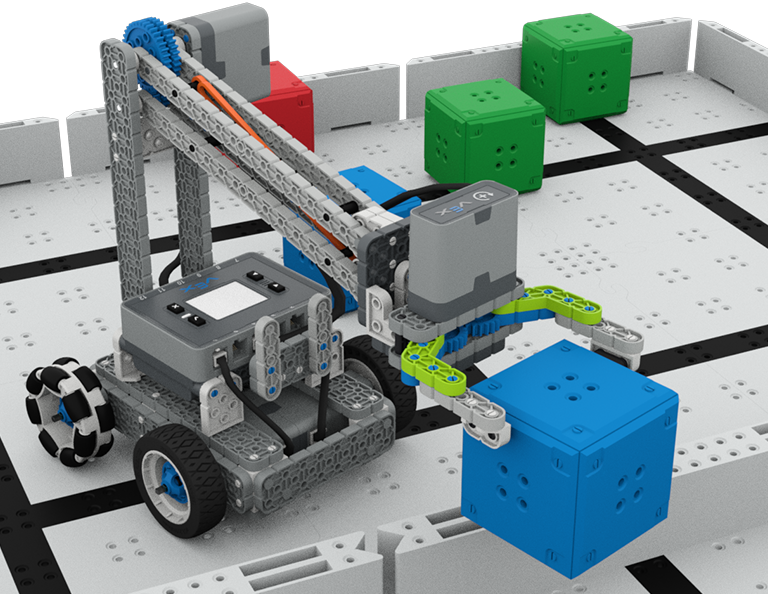
ในบทนี้ คุณจะได้สำรวจความแตกต่างระหว่างการควบคุมคนขับและความท้าทายแบบอัตโนมัติ ขณะที่คุณเรียนรู้การขับเคลื่อน Clawbot และเขียนโค้ดเพื่อจัดเรียงและซ้อนลูกบาศก์ในการแข่งขัน Cube Collector!
ไปที่พอร์ทัลครูเพื่อดูสื่อและวิดีโอสนับสนุนครูเกี่ยวกับเนื้อหาและการอำนวยความสะดวกของบทเรียน Cube Collector
บทที่ 1: บทนำ
ในบทเรียนนี้คุณจะได้รับการแนะนำให้รู้จักกับการแข่งขัน Cube Collector สร้าง Clawbot และเตรียมพร้อมที่จะเขียนโค้ด

Lesson 2: Driver Control
In this Lesson, you will learn about using the Driver Control program on the IQ Brain so that you can drive the Clawbot to stack and score cubes on the Field and participate in the Speed Stack Challenge.

บทที่ 3: การเข้ารหัสสำหรับการเคลื่อนไหวอัตโนมัติ
ในบทเรียนนี้คุณจะได้เรียนรู้เกี่ยวกับการเข้ารหัสหุ่นยนต์ของคุณสำหรับการเคลื่อนไหวอัตโนมัติรวมถึงวิธีการวางแผนเส้นทางของหุ่นยนต์ของคุณ จากนั้นคุณจะสร้างโครงการ VEXcode IQ เพื่อทำคะแนนและเรียงคิวบ์ในการเข้ารหัสสำหรับคิวบ์ท้าทายอัตโนมัติ

บทที่ 4: การใช้โปรแกรมหลายโปรแกรม (อัตโนมัติและไดรเวอร์)
ในบทเรียนนี้คุณจะได้เรียนรู้เกี่ยวกับการปรับแต่งการควบคุมไดรเวอร์และวิธีที่คุณสามารถใช้ Controller และ VEXcode IQ เพื่อเพิ่มประสิทธิภาพกลยุทธ์ไดรเวอร์ของคุณสำหรับการแข่งขันในความท้าทายด้วยการควบคุมไดรเวอร์และการทำงานอัตโนมัติ

บทที่ 5: การแข่งขันสะสมลูกบาศก์
ในบทเรียนนี้คุณจะใช้การเรียนรู้จากบทเรียนก่อนหน้านี้เพื่อแข่งขันในการแข่งขัน Cube Collector!

บทที่ 6: บทสรุป
ในบทเรียนนี้ คุณจะได้สะท้อนถึงหน่วยการเรียนรู้และระบุความเชื่อมโยงระหว่างสิ่งที่คุณได้ทำกับอาชีพ STEM ที่เกี่ยวข้อง

ปราสาทแครชเชอร์
6 บทเรียน
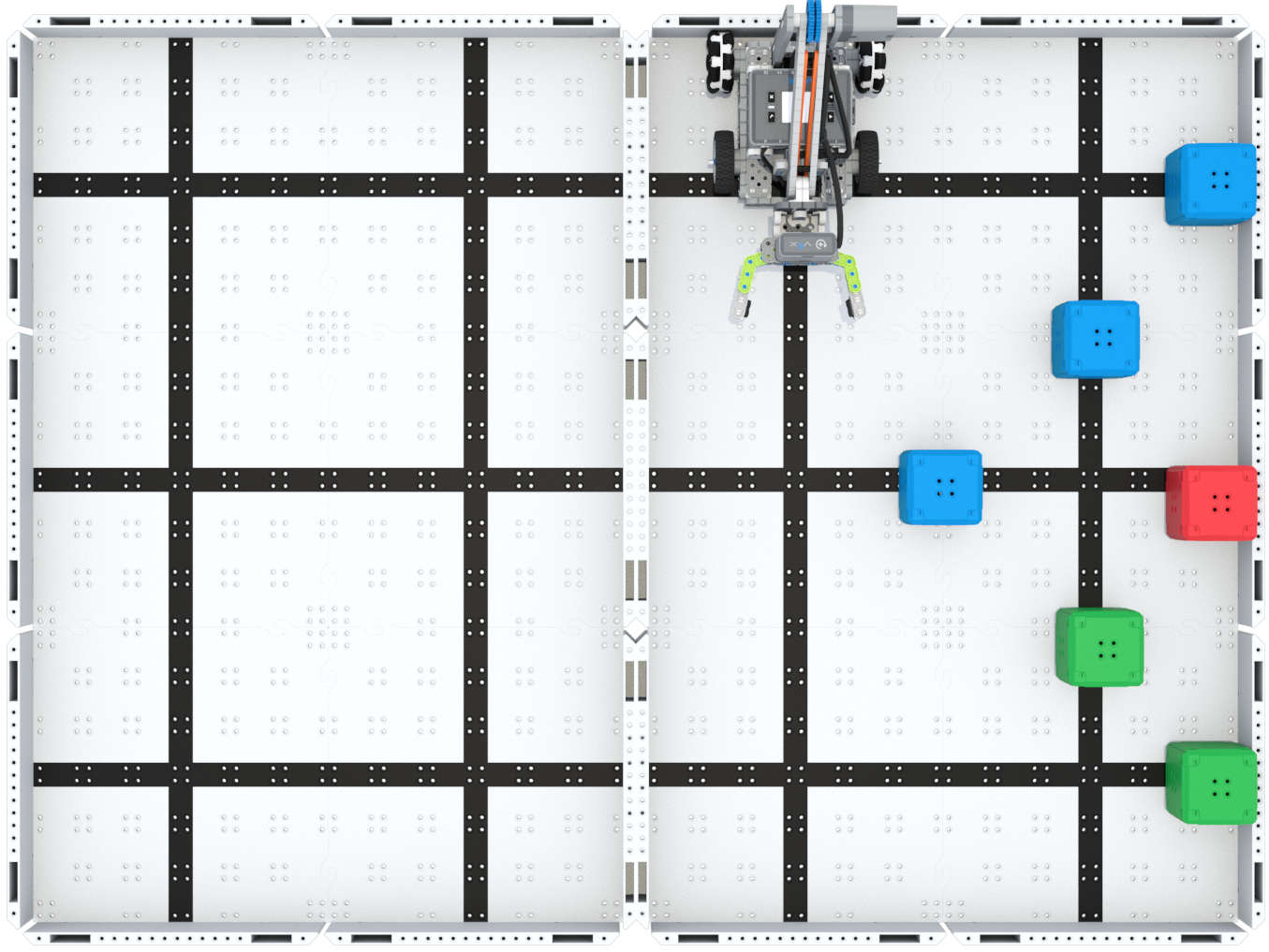
ในบทนี้ คุณจะได้สำรวจวิธีใช้เซ็นเซอร์แบบออปติคอลและระยะทางเพื่อค้นหา ชน และเคลียร์ 'ปราสาท' ลูกบาศก์เพื่อทำคะแนนในการแข่งขัน Castle Crasher!
ไปที่พอร์ทัลครูเพื่อดูสื่อและวิดีโอสนับสนุนครูเกี่ยวกับเนื้อหาและการอำนวยความสะดวกของบทเรียน Castle Crasher

บทที่ 1: บทนำ
ในบทเรียนนี้คุณจะได้รับการแนะนำให้รู้จักกับการแข่งขัน Castle Crasher สร้าง BaseBot และเตรียมพร้อมสำหรับการเขียนโค้ด

บทที่ 2: Castle Crasher ไม่มีเซ็นเซอร์
ในบทเรียนนี้คุณจะได้เรียนรู้เกี่ยวกับการคำนวณมุมและการเปลี่ยนความเร็วของหุ่นยนต์ของคุณเพื่อให้คุณสามารถแข่งขันใน Tower Over Challenge ได้

บทที่ 3: Castle Crasher + เซ็นเซอร์ระยะทาง
ในบทเรียนนี้คุณจะได้เรียนรู้เกี่ยวกับเซ็นเซอร์ระยะทางคืออะไรและสามารถใช้กับหุ่นยนต์ของคุณได้อย่างไร นอกจากนี้คุณยังจะได้เรียนรู้เกี่ยวกับบล็อก [รอจนกว่า] และวิธีใช้ในโครงการ VEXcode IQ จากนั้นคุณจะนำสิ่งที่คุณได้เรียนรู้ไปใช้ในการแข่งขัน Cube Crasher Challenge!

บทที่ 4: การสร้างอัลกอริทึม
ในบทเรียนนี้คุณจะได้เรียนรู้เกี่ยวกับออปติคัลเซนเซอร์และวิธีการสร้างอัลกอริทึมที่ใช้ข้อเสนอแนะของเซ็นเซอร์ จากนั้นคุณจะต้องตั้งรหัสให้หุ่นยนต์ของคุณค้นหาลูกบาศก์โดยอัตโนมัติและผลักออกจากสนามในการแข่งขันกวาดล้างสนาม

บทเรียนที่ 5: การแข่งขัน Castle Crasher
ในบทเรียนนี้คุณจะใช้การเรียนรู้ของคุณจากบทเรียนก่อนหน้านี้เพื่อแข่งขันในการแข่งขัน Castle Crasher!
บทที่ 6: บทสรุป
ในบทเรียนนี้คุณจะได้ทบทวนหน่วยและระบุความเชื่อมโยงระหว่างสิ่งที่คุณทำกับอาชีพ STEM
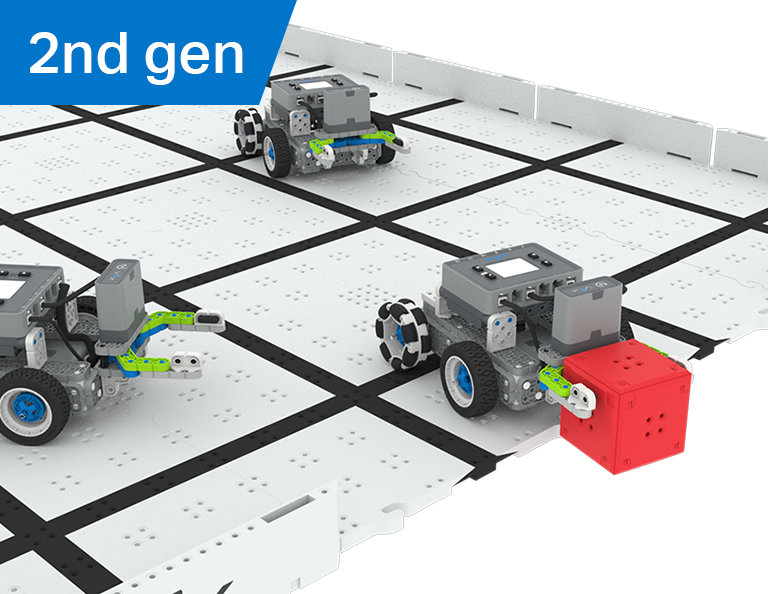
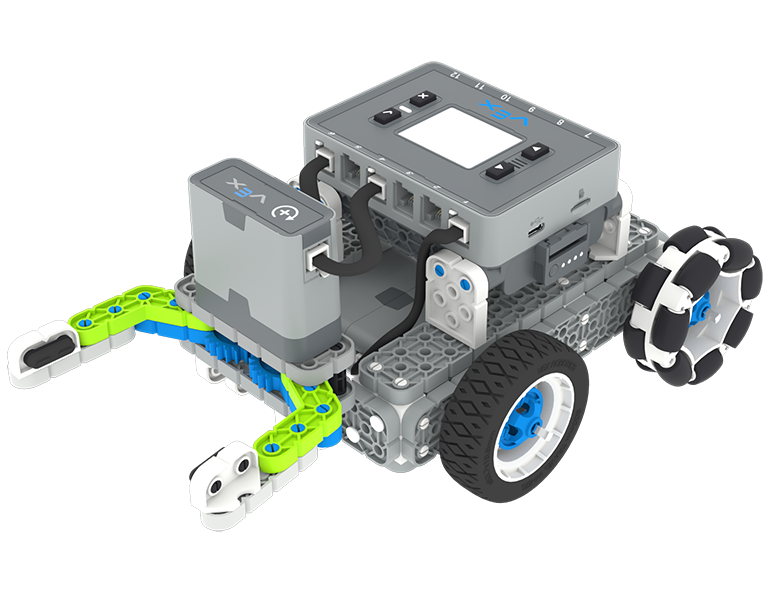
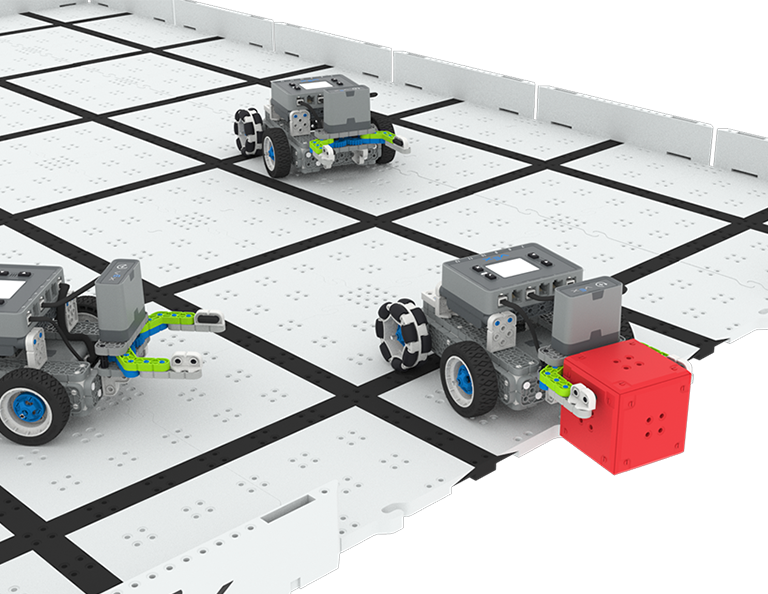
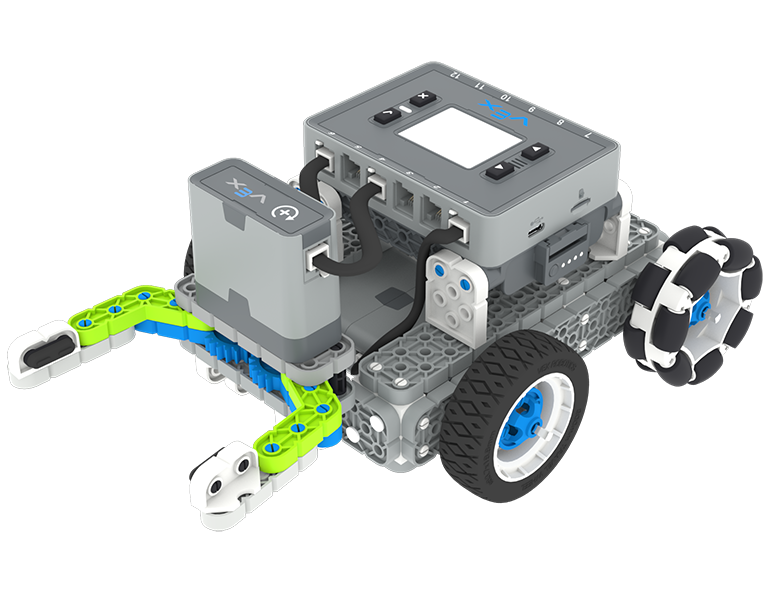
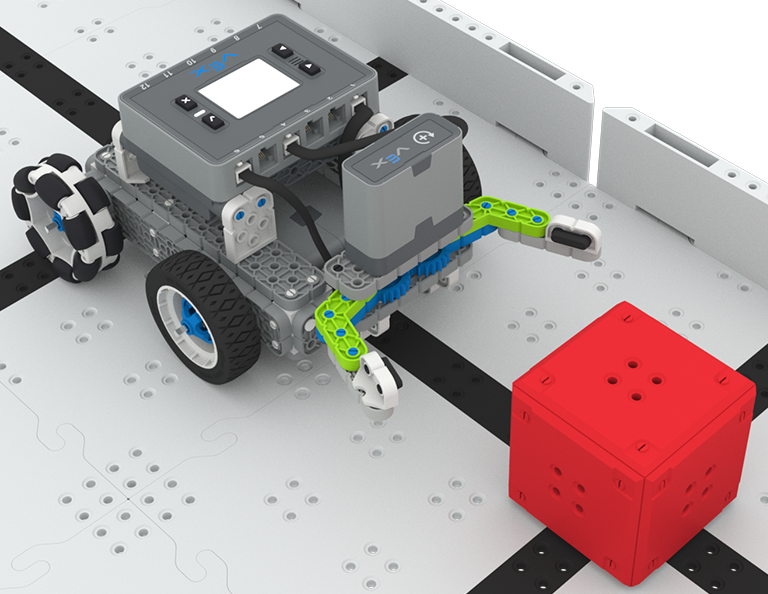
ล่าสมบัติ
5 บทเรียน
ในหน่วยการเรียนรู้นี้ คุณจะสร้างและเขียนโค้ด Simple Clawbot ด้วยเซ็นเซอร์ออปติคัลเพื่อจดจำและรวบรวมลูกบาศก์สีแดงเพื่อแข่งขันในการแข่งขัน Treasure Hunt!
ไปที่พอร์ทัลครูเพื่อดูสื่อและวิดีโอสนับสนุนครูเกี่ยวกับเนื้อหาและการอำนวยความสะดวกของบทเรียน Treasure Hunt
บทที่ 1: บทนำ
คุณจะได้รับการแนะนำเกี่ยวกับการแข่งขันล่าสมบัติ สร้าง Simple Clawbot และเตรียมพร้อมสำหรับการเขียนโค้ด
บทที่ 2: กรงเล็บไม่มีเซ็นเซอร์
ในบทเรียนนี้ คุณจะได้เรียนรู้เกี่ยวกับการใช้บล็อก Drivetrain และ Motion ใน VEXcode IQ เพื่อเขียนโค้ด Simple Clawbot เพื่อรวบรวมและเคลื่อนย้ายลูกบาศก์ในความท้าทาย Clawbot Collector
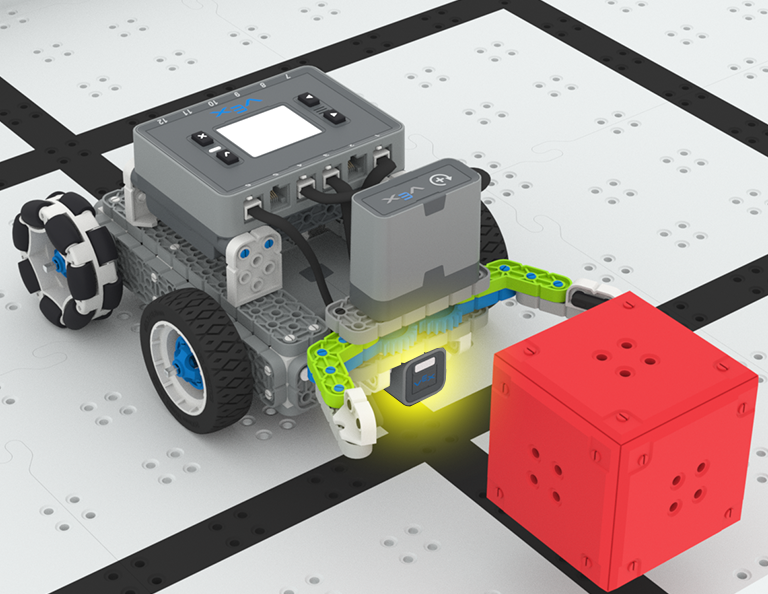
บทที่ 3: กรงเล็บพร้อมเซ็นเซอร์
ในบทเรียนนี้ คุณจะได้เรียนรู้เกี่ยวกับการเขียนโค้ดเซ็นเซอร์ออปติคัลเพื่อตรวจจับ รวบรวม และเคลื่อนย้ายลูกบาศก์สีแดงในความท้าทาย Treasure Mover!
บทที่ 4: การแข่งขันล่าสมบัติ
ในบทเรียนนี้ คุณจะนำการเรียนรู้จากบทเรียนก่อนหน้ามาประยุกต์ใช้ในการแข่งขันล่าสมบัติ!
บทที่ 5: บทสรุป
ในบทเรียนนี้คุณจะได้ทบทวนหน่วยและระบุความเชื่อมโยงระหว่างสิ่งที่คุณทำกับอาชีพ STEM