STEM LabsVEX V5

สเต็มแล็บ
13 ห้องทดลอง
คอลเลกชันของ V5 STEM Labs








STEM LabsVEX GO
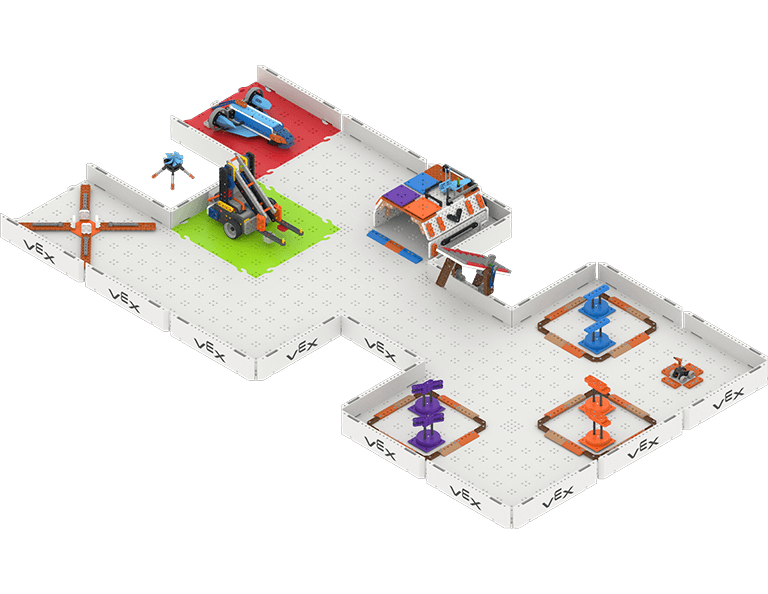
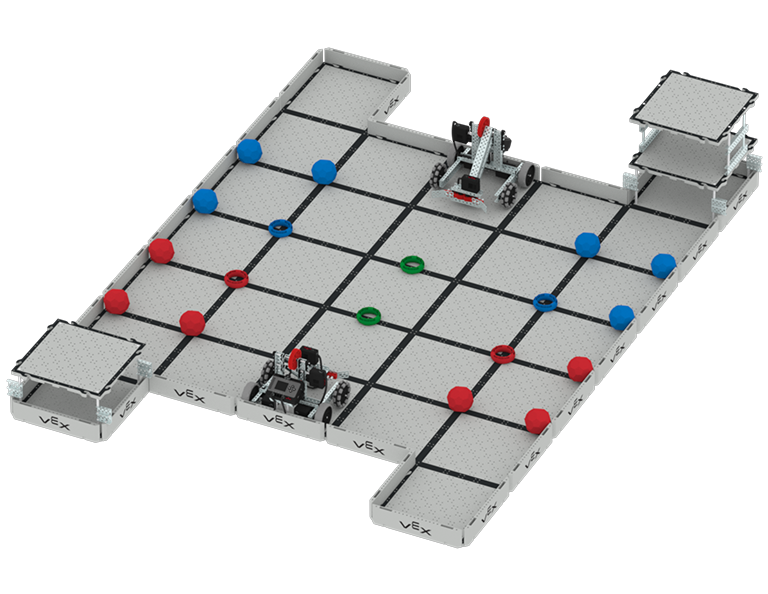
การสำรวจคณิตศาสตร์ดาวอังคาร
5 ห้องทดลอง
ในหน่วยทดลอง STEM Lab ของการแข่งขัน VEX GO นี้ นักเรียนจะได้ขับ Hero Robot เพื่อเก็บตัวอย่าง ช่วยเหลือรถแลนด์โรเวอร์ ยกเรือจรวด และอื่นๆ อีกมากมายในการแข่งขัน Mars Math Expedition!
แล็บ 4
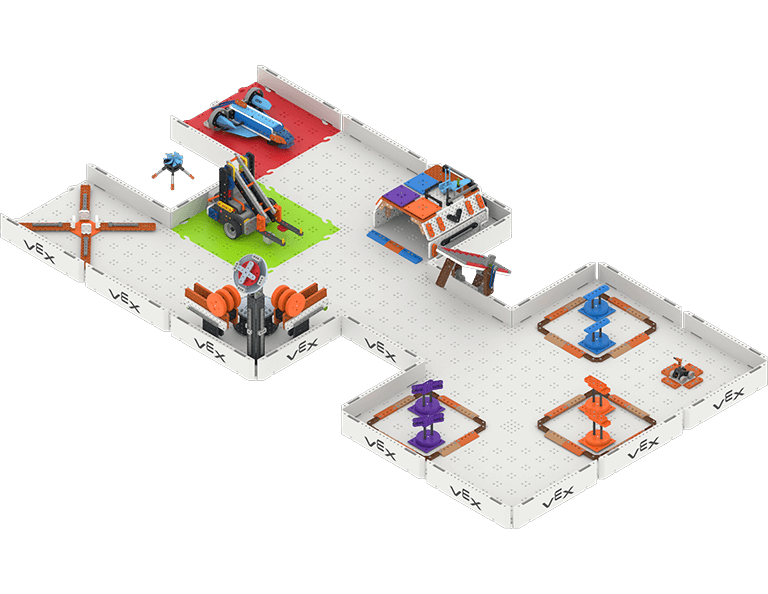
ความบ้าคลั่งของเซลล์เชื้อเพลิง
นำเซลล์เชื้อเพลิงออกจากแท่นวางและนำไปยังสถานที่ต่างๆในสนามโดยใช้หุ่นยนต์ฮีโร่การแข่งขัน vex GO ของคุณในการแข่งขัน Frenzy Fuel Cell
ฉันจะทำงานร่วมกับทีมของฉันเพื่อย้ายเซลล์เชื้อเพลิงในการแข่งขันได้อย่างไร?
สร้าง: การแข่งขันหุ่นยนต์ฮีโร่ขั้นสูง 2.0
ใช้สนามแข่งขัน GO Mars Math Expedition ขั้นที่ 4
แล็บ 5
การแข่งขันสำรวจคณิตศาสตร์บนดาวอังคาร
ใช้ทักษะทั้งหมดที่คุณได้เรียนรู้ในห้องทดลองก่อนหน้านี้และรวมเข้าด้วยกันเพื่อสร้างกลยุทธ์เกมที่ชนะใน Mars Math Expedition!
ฉันจะทำงานร่วมกับทีมของฉันเพื่อทำคะแนนให้ได้มากที่สุดในการแข่งขันได้อย่างไร?
สร้าง: การแข่งขันหุ่นยนต์ฮีโร่ขั้นสูง 2.0
ใช้สนามแข่งขัน Mars Math Expedition GO เต็มรูปแบบ
STEM LabsVEX 123

การย้ายจากระบบสัมผัสไปสู่ Coder
2 ห้องทดลอง
ใช้สิ่งที่คุณรู้เกี่ยวกับการเขียนโค้ดด้วยปุ่มสัมผัสเพื่อเรียนรู้การเขียนโค้ดหุ่นยนต์ 123 โดยใช้การ์ด Coder และ Coder


STEM LabsVEX 123
ค้นหาแมลง
2 ห้องทดลอง
ข้อบกพร่องในโค้ดของเราช่วยให้เราเรียนรู้! ฝึกฝนการใช้กระบวนการแก้ไขจุดบกพร่องเพื่อระบุ ค้นหา และแก้ไขจุดบกพร่องในโปรเจ็กต์ เพื่อให้ 123 Robot สามารถเคลื่อนที่ไปในทิศทางที่เราต้องการ
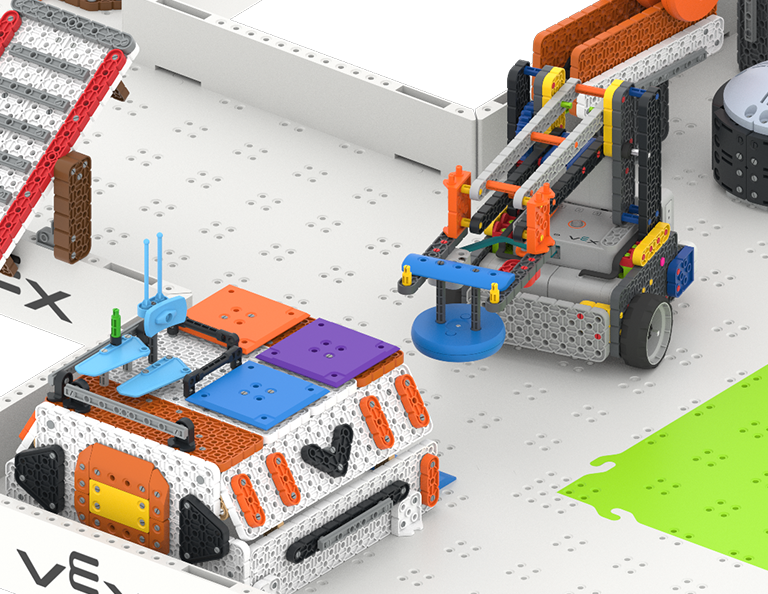
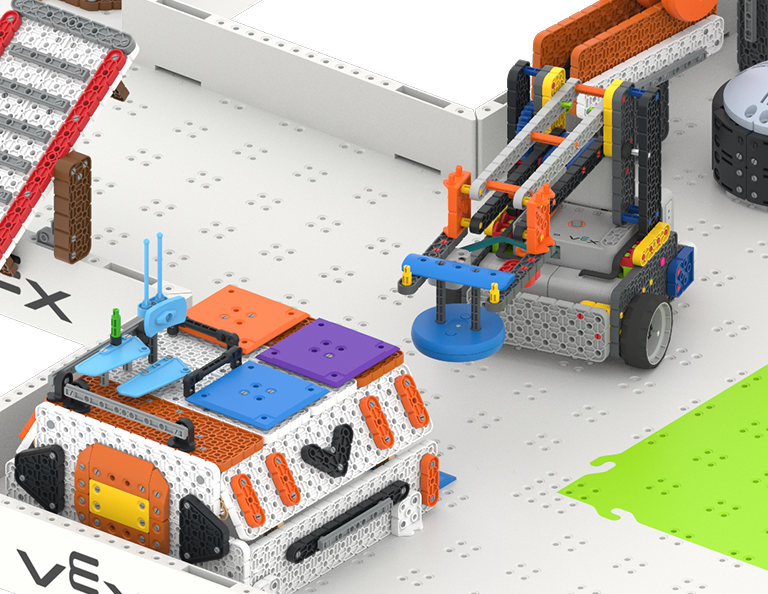
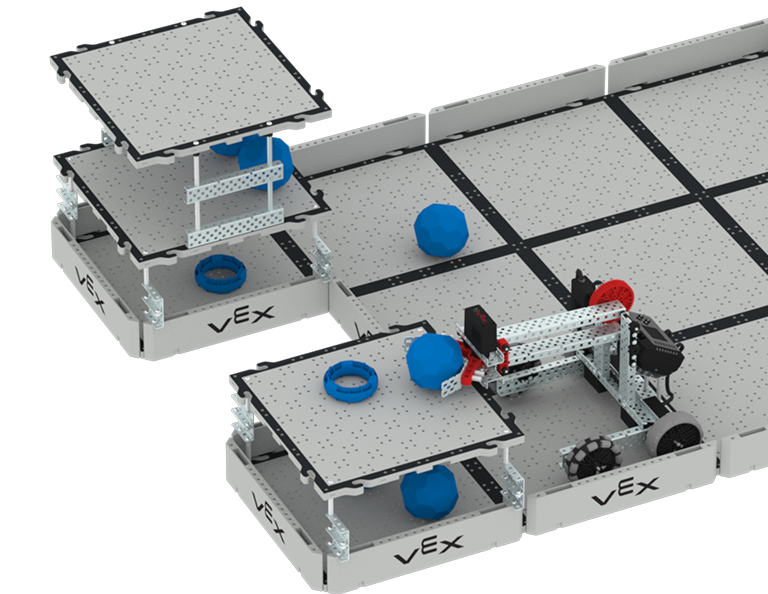
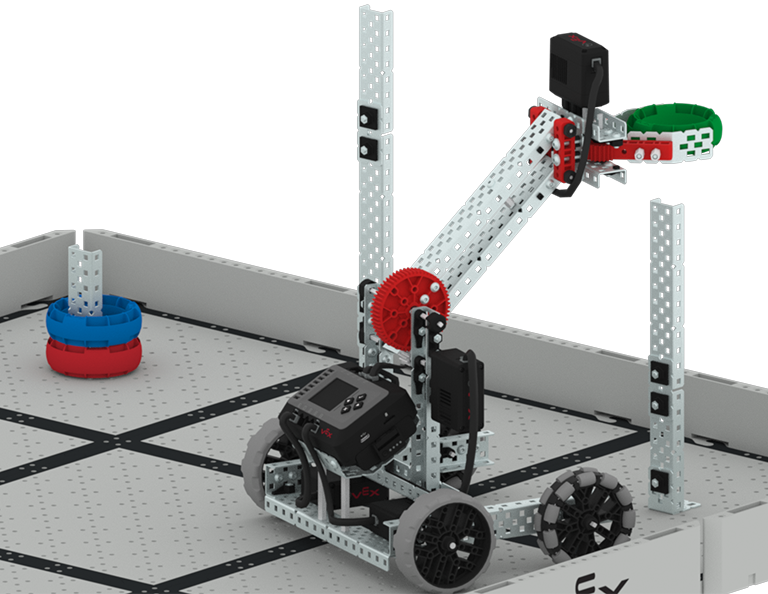
ตัววางแพลตฟอร์ม
6 บทเรียน
ในบทนี้ คุณจะได้สำรวจวิธีใช้อุปกรณ์ควบคุมบนคลอว์บอตของคุณ รวมถึงการยก เพื่อย้ายบัคกี้บอลและวงแหวนไปยังแพลตฟอร์มในระดับต่างๆ คุณจะใช้ความรู้นี้เพื่อร่วมมือกับทีมอื่นเพื่อสร้างกลยุทธ์ที่ผสมผสานการออกแบบหุ่นยนต์และทักษะการขับเพื่อแข่งขันในการแข่งขัน Platform Placer!
สตริงที่มา (ภาษาอังกฤษในตัว) ไปที่พอร์ทัลของครูเพื่อดูสื่อและวิดีโอสนับสนุนครูเกี่ยวกับเนื้อหาและการอำนวยความสะดวกของบทเรียน Platform Placer
บทที่ 1: บทนำ
ในบทเรียนนี้คุณจะได้รับการแนะนำให้รู้จักกับการแข่งขัน Platform Placer สร้าง Clawbot และเตรียมพร้อมที่จะเขียนโค้ด
บทที่ 2: การจัดการวัตถุต่างๆ
ในบทเรียนนี้คุณจะได้เรียนรู้เกี่ยวกับผู้บงการและวิธีการออกแบบผู้บงการที่มีประสิทธิภาพเพื่อให้งานสำเร็จเพื่อให้คุณสามารถขับเคลื่อน Clawbot เพื่อทำคะแนนวงแหวนและบัคกี้บอลบนแพลตฟอร์มที่แตกต่างกัน จากนั้นคุณจะได้เข้าร่วมการแข่งขัน Push and Place Challenge
บทที่ 3: การออกแบบลิฟท์
ในบทเรียนนี้คุณจะได้เรียนรู้เกี่ยวกับการออกแบบลิฟท์เพื่อให้คุณสามารถทำคะแนนวัตถุเกมบนแพลตฟอร์มสูงและเข้าร่วมในการท้าทายการยกและการทำคะแนน
บทที่ 4: การพัฒนากลยุทธ์
ในบทเรียนนี้คุณจะได้เรียนรู้เกี่ยวกับกลยุทธ์เกมและวิธีการจัดระเบียบการพัฒนากลยุทธ์ของคุณกับทีมของคุณเพื่อให้คุณสามารถสร้างกลยุทธ์ที่ชนะเพื่อแข่งขันในการท้าทายกลยุทธ์ร่วมกัน
บทที่ 5: การแข่งขัน Platform Placer
ในบทเรียนนี้คุณจะใช้การเรียนรู้จากบทเรียนก่อนหน้านี้เพื่อแข่งขันในการแข่งขัน Platform Placer!

บทที่ 6: บทสรุป
ในบทเรียนนี้คุณจะได้ทบทวนหน่วยและระบุความเชื่อมโยงระหว่างสิ่งที่คุณทำกับอาชีพ STEM ที่เชื่อมโยงกัน
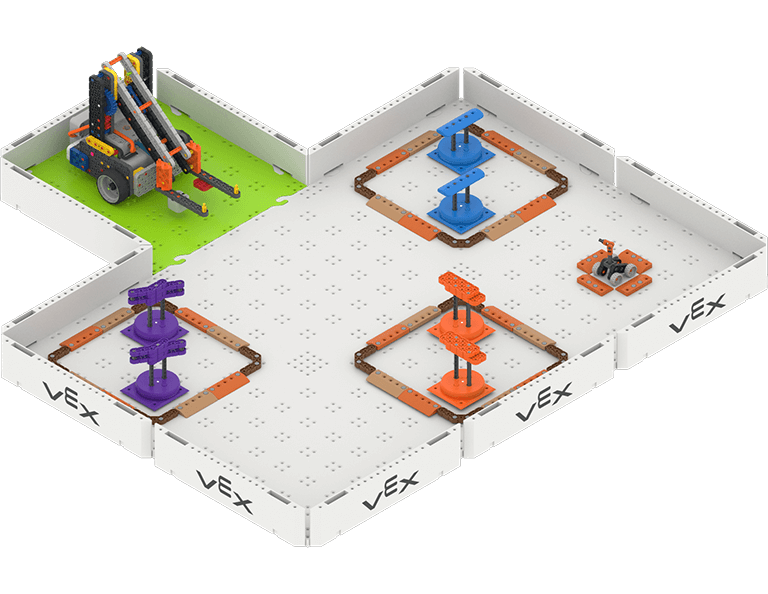
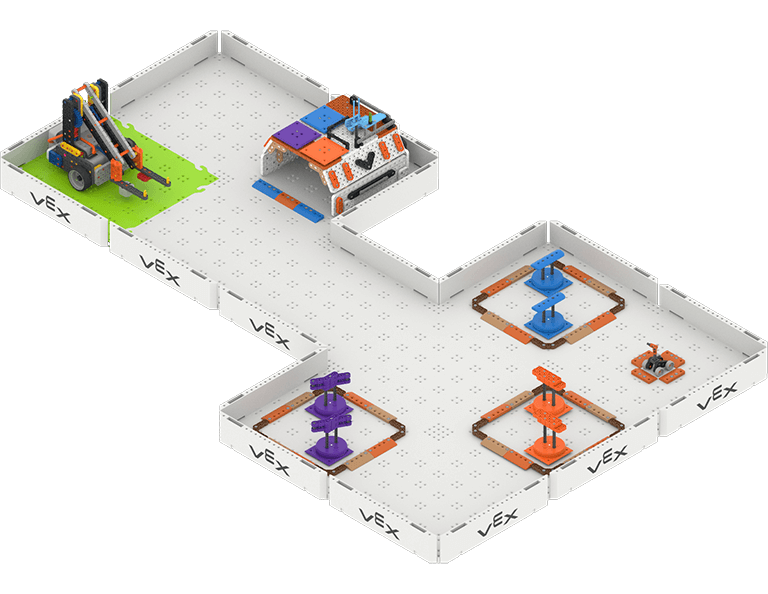
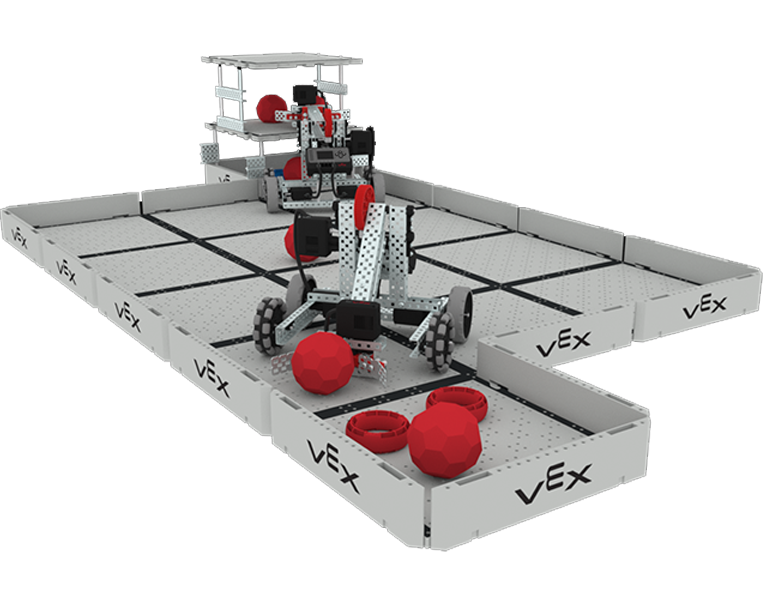
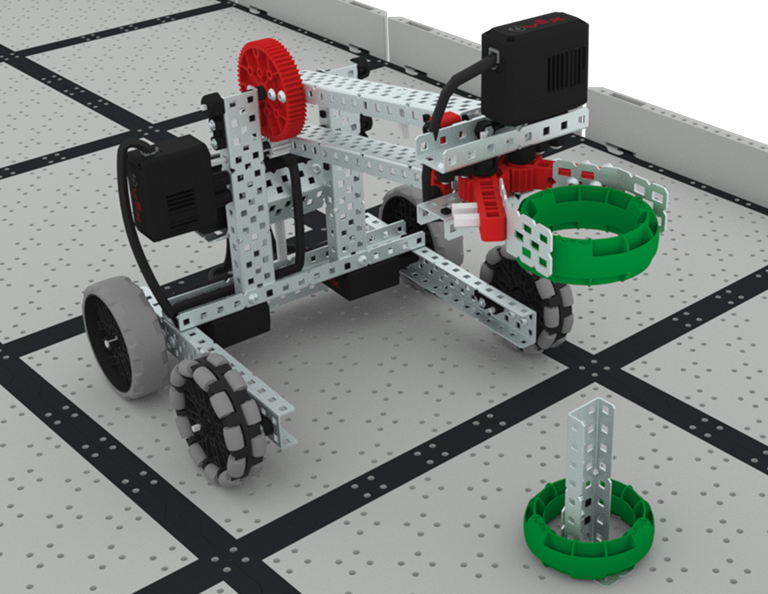
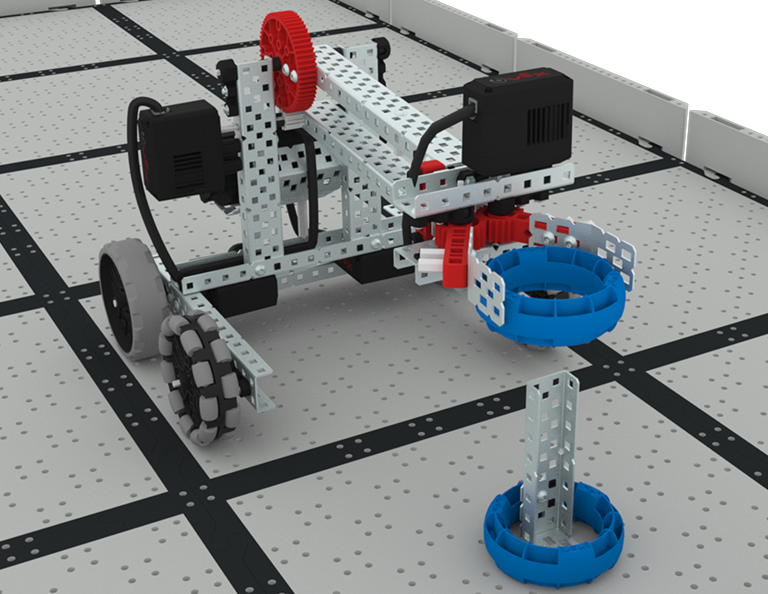
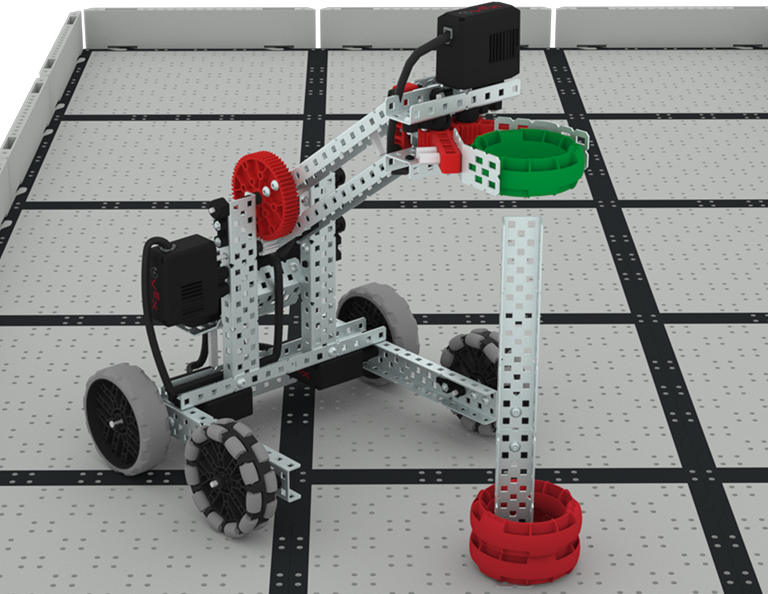
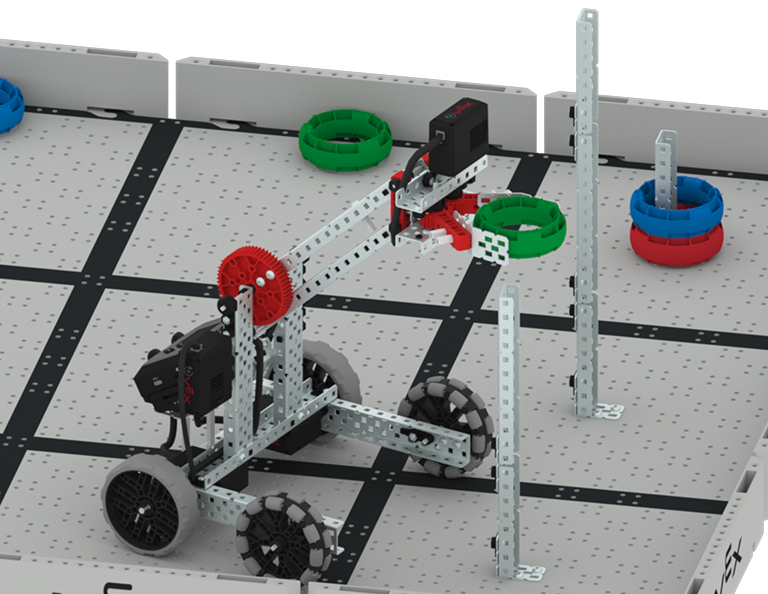
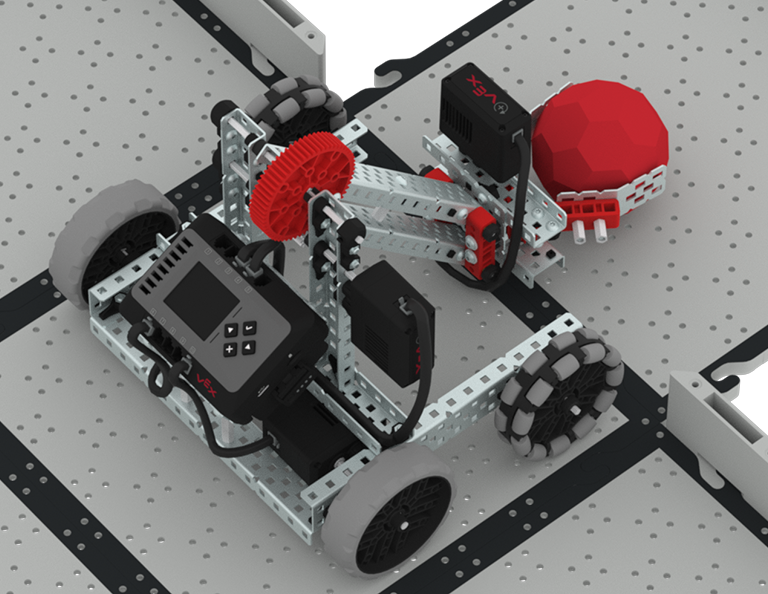
ผู้นำแหวน
6 บทเรียน
ในบทนี้ คุณจะได้สำรวจความแตกต่างระหว่างการควบคุมผู้ขับและการเคลื่อนไหวอัตโนมัติ เมื่อคุณใช้หลายโปรแกรม (การควบคุมอัตโนมัติและการควบคุมผู้ขับ) เพื่อให้คะแนนวงแหวนบนโพสต์ที่มีขนาดต่างกันในการแข่งขัน Ring Leader
ไปที่พอร์ทัลของครูเพื่อดูสื่อและวิดีโอสนับสนุนครูเกี่ยวกับเนื้อหาและการอำนวยความสะดวกของบทเรียน Ring Leader
บทที่ 1: บทนำ
ในบทเรียนนี้คุณจะได้รับการแนะนำให้รู้จักกับการแข่งขันผู้นำแหวนสร้าง Clawbot และเตรียมพร้อมที่จะเขียนโค้ด
บทที่ 2: การควบคุมผู้ขับขี่
ในบทเรียนนี้คุณจะได้เรียนรู้เกี่ยวกับการใช้โปรแกรมควบคุมผู้ขับขี่บนสมอง EXP เพื่อให้คุณสามารถขับ Clawbot เพื่อจัดการวงแหวนในสนามและเข้าร่วมในการท้าทายความเร็วและคะแนน
บทที่ 3: การเข้ารหัสสำหรับการเคลื่อนไหวอัตโนมัติ
ในบทเรียนนี้คุณจะได้เรียนรู้เกี่ยวกับการเข้ารหัสหุ่นยนต์ของคุณสำหรับการเคลื่อนไหวอัตโนมัติรวมถึงวิธีการวางแผนเส้นทางของหุ่นยนต์ของคุณ จากนั้นคุณจะสร้างโครงการ VEXcode EXP เพื่อวางแหวนบนโพสต์ใน Coding Crunch Challenge
บทที่ 4: การใช้โปรแกรมหลายโปรแกรม (อัตโนมัติและไดรเวอร์)
ในบทเรียนนี้คุณจะได้เรียนรู้เกี่ยวกับการปรับแต่งการควบคุมไดรเวอร์และวิธีที่คุณสามารถใช้ Controller และ VEXcode EXP เพื่อเพิ่มประสิทธิภาพกลยุทธ์ไดรเวอร์ของคุณสำหรับการแข่งขันใน Split Decision Challenge
บทที่ 5: การแข่งขันริงลีดเดอร์
ในบทเรียนนี้คุณจะใช้การเรียนรู้ของคุณจากบทเรียนก่อนหน้านี้เพื่อแข่งขันในการแข่งขันผู้นำแหวน!
บทที่ 6: บทสรุป
ในบทเรียนนี้คุณจะได้ทบทวนหน่วยและระบุความเชื่อมโยงระหว่างสิ่งที่คุณทำกับอาชีพ STEM ที่เชื่อมโยงกัน
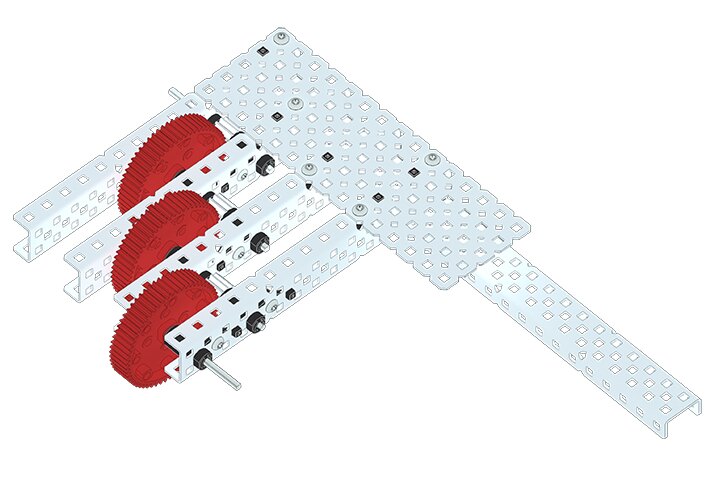
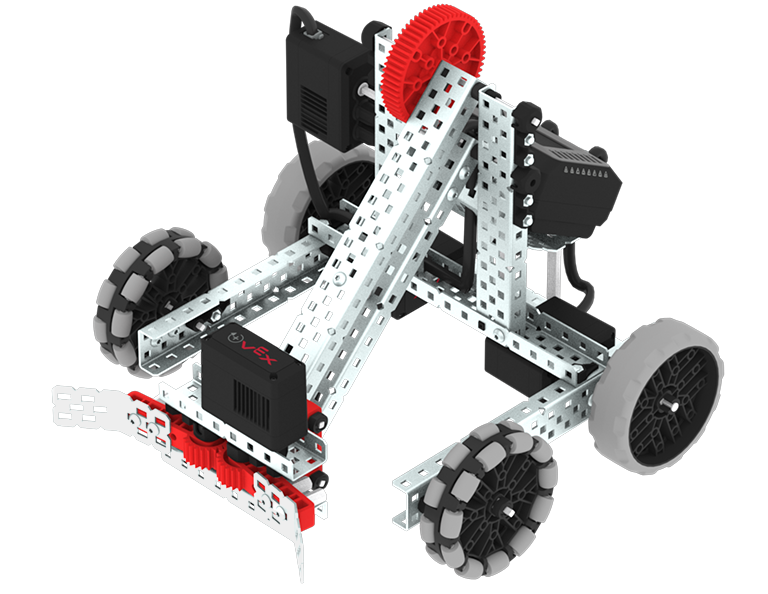
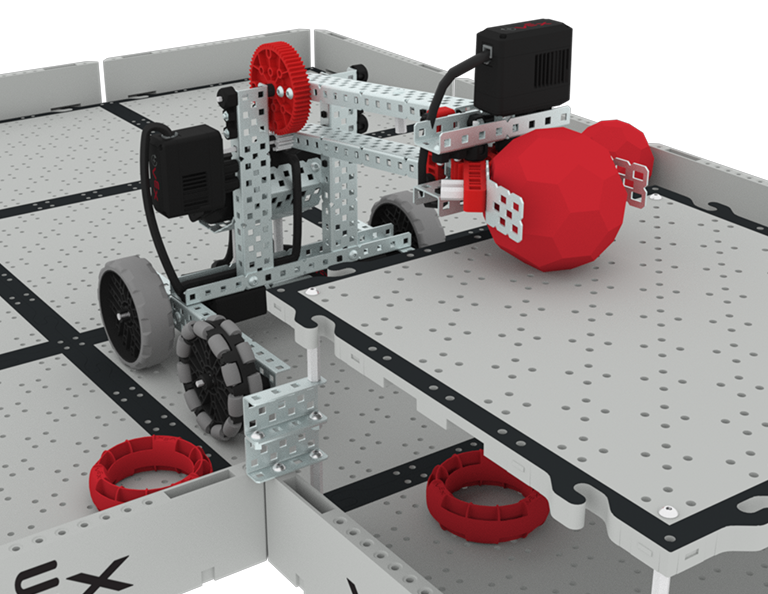
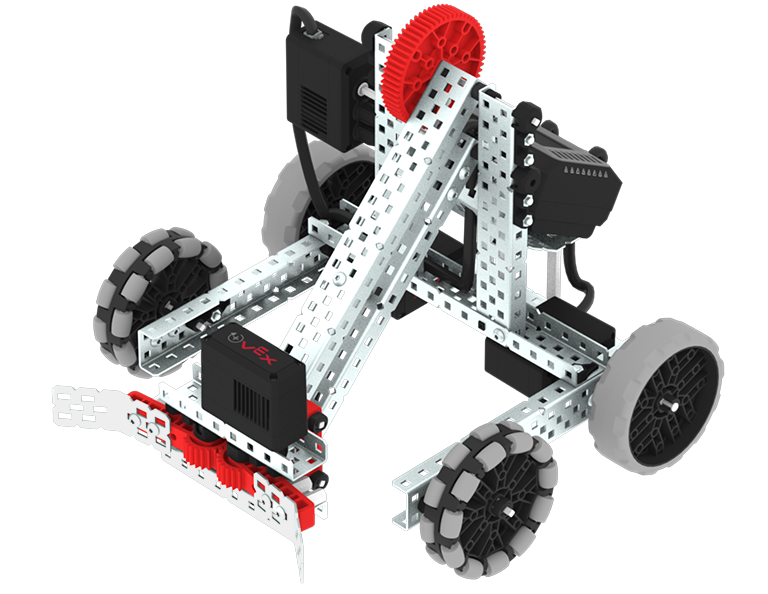
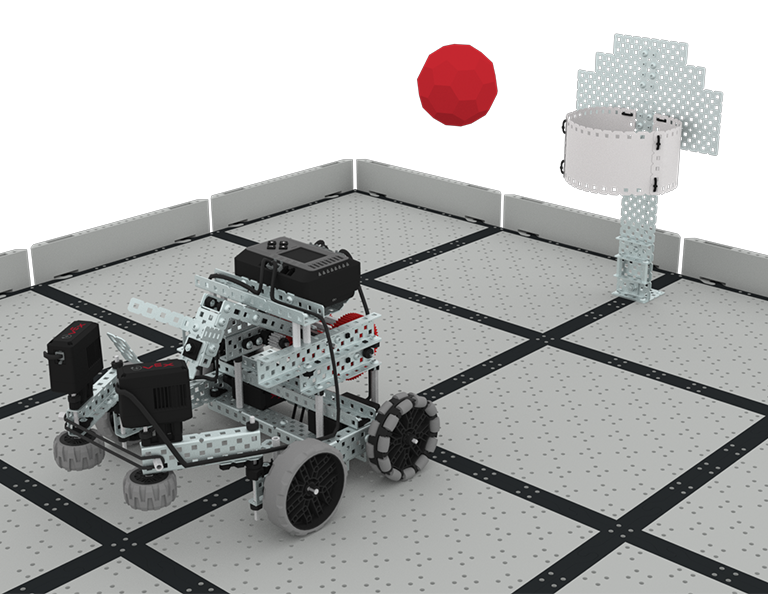
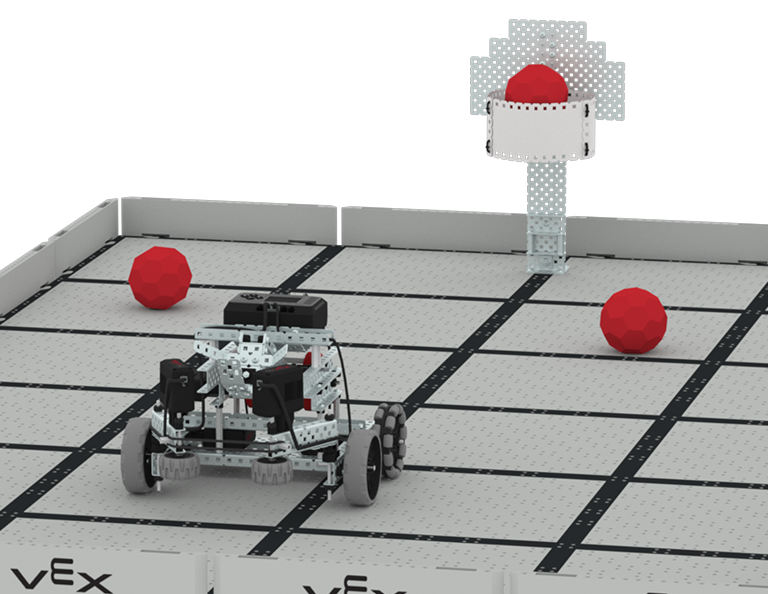
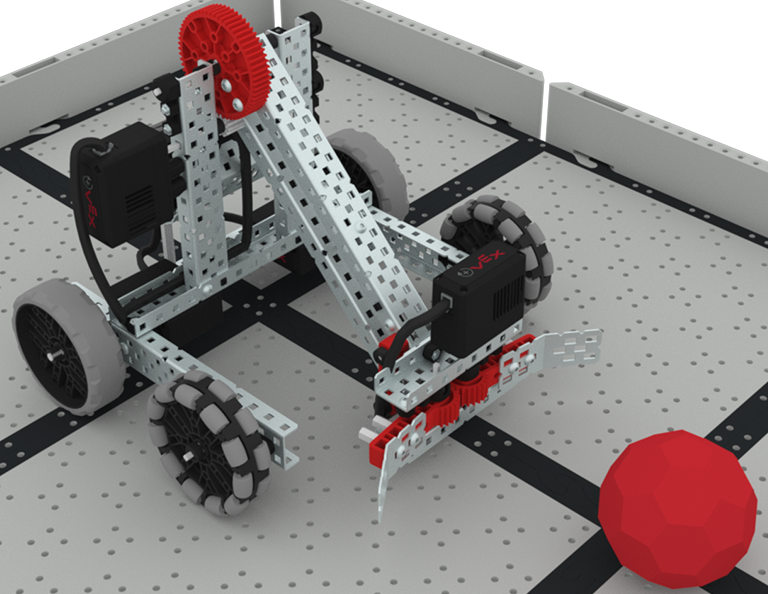
บัคกี้บาสเก็ตบอล
4 บทเรียน
ในบทนี้ คุณจะได้สำรวจวิธีการขับเคลื่อน CatapultBot เพื่อรวบรวม ยิง และให้คะแนน Buckyballs ลงห่วงในการแข่งขัน Bucky Basketball!
สตริงต้นฉบับ (ภาษาอังกฤษในตัว) ไปที่พอร์ทัลครูเพื่อดูสื่อและวิดีโอสนับสนุนครูเกี่ยวกับเนื้อหาและการอำนวยความสะดวกของ Bucky Basketball Lessons
บทที่ 1: บทนำ
ในบทเรียนนี้คุณจะสร้าง CatapultBot และชาร์จตัวควบคุมและแบตเตอรี่ของคุณ
บทเรียนที่ 2: การขับเคลื่อน CatapultBot
ในบทเรียนนี้คุณจะได้เรียนรู้ว่าการบริโภคและการตีลังกาของ CatapultBot ทำงานอย่างไรและจะขับเคลื่อนโดยใช้ตัวควบคุมเพื่อแข่งขันใน Buckyball Basket Challenge ได้อย่างไร!
บทที่ 3: การแข่งขันบัคกี้บาสเก็ตบอล
ในบทเรียนนี้คุณจะนำการเรียนรู้จากบทเรียนก่อนหน้านี้ไปใช้ในการแข่งขันบัคกี้บาสเก็ตบอล!
บทที่ 4: บทสรุป
ในบทเรียนนี้คุณจะได้ทบทวนหน่วยและระบุความเชื่อมโยงระหว่างสิ่งที่คุณทำกับอาชีพ STEM ที่เชื่อมโยงกัน
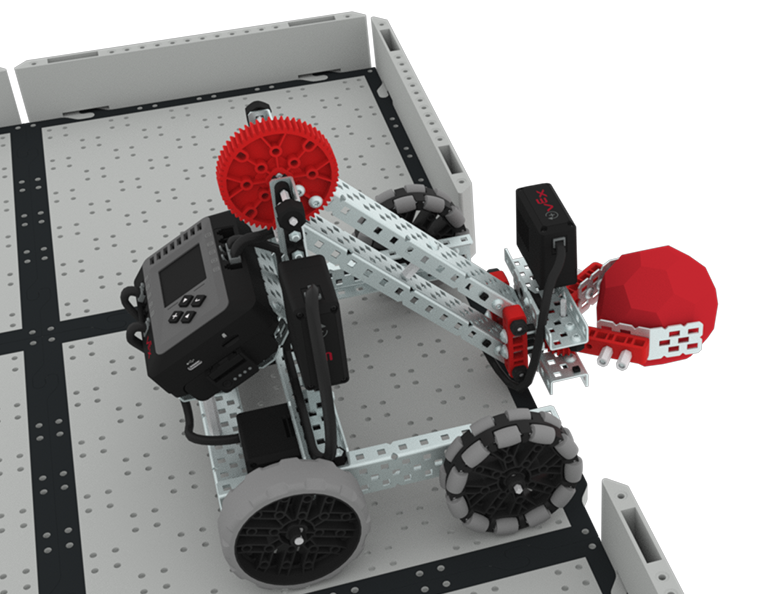
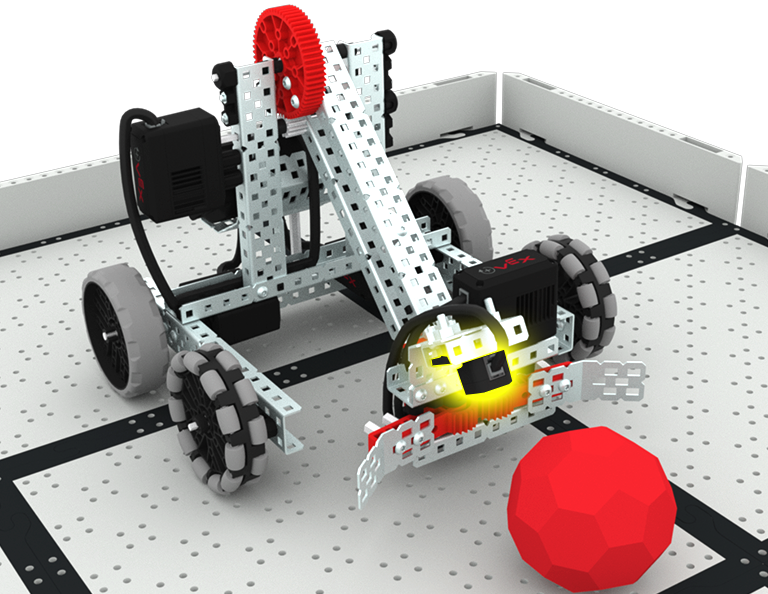
ล่าสมบัติ
5 บทเรียน
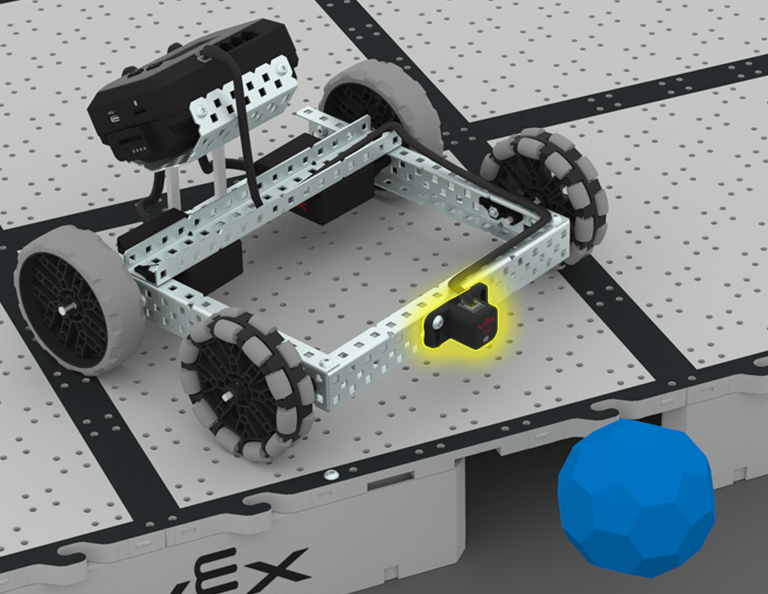
ในหน่วยการเรียนรู้นี้ คุณจะสร้างและเขียนโค้ด Clawbot ด้วยเซ็นเซอร์ออปติคอลเพื่อจดจำและรวบรวม Buckyballs สีแดงเพื่อแข่งขันในการแข่งขัน Treasure Hunt!
ไปที่พอร์ทัลครูเพื่อดูสื่อและวิดีโอสนับสนุนครูเกี่ยวกับเนื้อหาและการอำนวยความสะดวกของบทเรียน Treasure Hunt
บทที่ 1: บทนำ
คุณจะได้รับการแนะนำให้รู้จักกับการแข่งขันล่าสมบัติสร้าง Clawbot และเตรียมพร้อมที่จะเขียนโค้ด
บทที่ 2: กรงเล็บไม่มีเซ็นเซอร์
ในบทเรียนนี้คุณจะได้เรียนรู้เกี่ยวกับการใช้ Drivetrain และ Motion blocks ใน VEXcode EXP เพื่อเข้ารหัส Clawbot ของคุณเพื่อรวบรวมและย้าย Buckyballs ใน Collector Challenge
บทที่ 3: กรงเล็บพร้อมเซนเซอร์
ในบทเรียนนี้คุณจะได้เรียนรู้เกี่ยวกับการเข้ารหัสเซ็นเซอร์แสงเพื่อตรวจจับรวบรวมและเคลื่อนย้ายบัคกี้บอลสีแดงในการท้าทาย Treasure Mover!
บทเรียนที่ 4: การแข่งขันล่าสมบัติ
ในบทเรียนนี้คุณจะใช้การเรียนรู้ของคุณจากบทเรียนก่อนหน้านี้เพื่อแข่งขันในการแข่งขันล่าสมบัติ!
บทที่ 5: บทสรุป
ในบทเรียนนี้คุณจะได้ทบทวนหน่วยและระบุความเชื่อมโยงระหว่างสิ่งที่คุณทำกับอาชีพ STEM
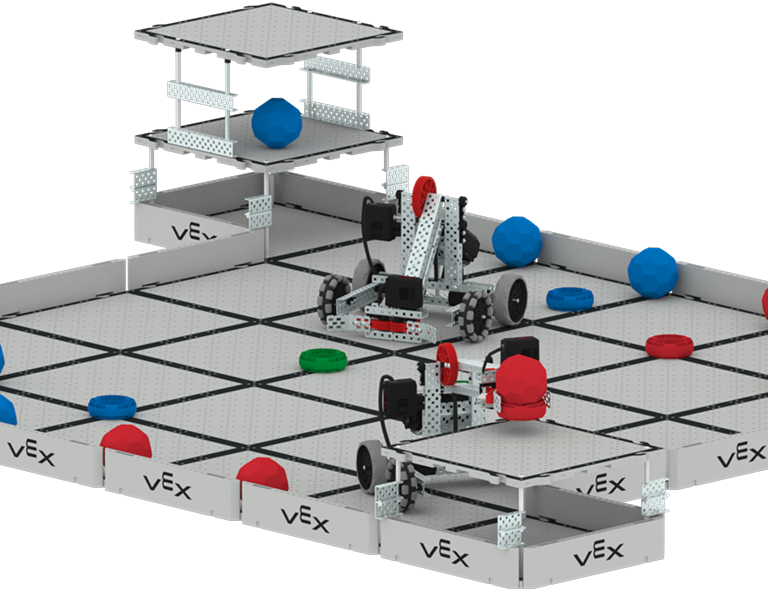
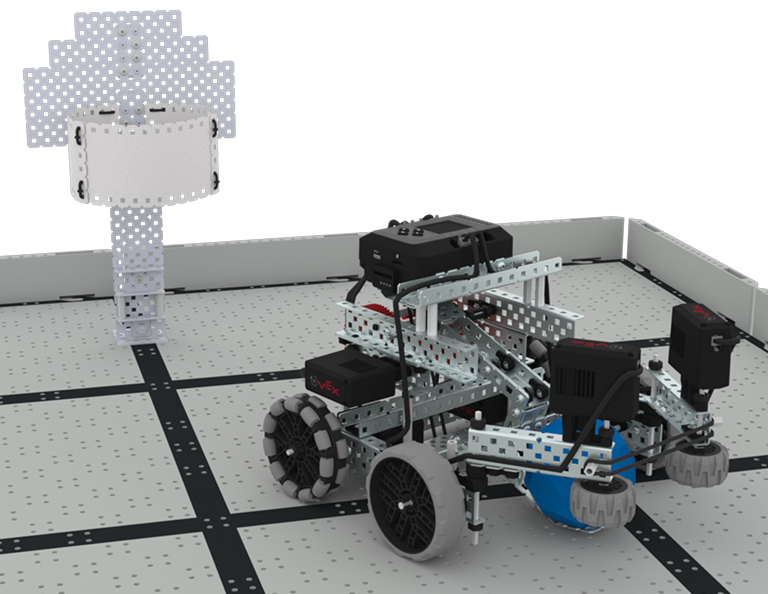
ปราสาทแครชเชอร์
6 บทเรียน
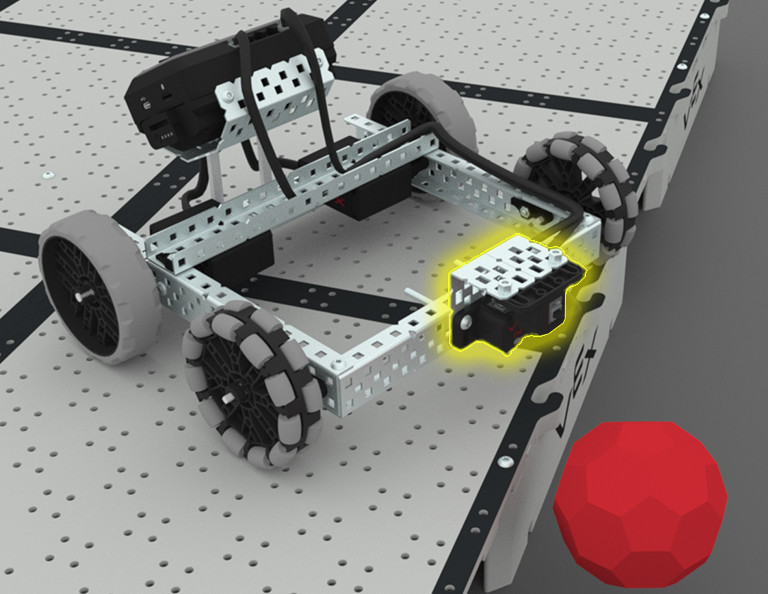
ในบทนี้ คุณจะได้สำรวจวิธีการใช้เซ็นเซอร์แบบออปติคัลและระยะทางเพื่อค้นหา ชน และเคลียร์ 'ปราสาท' ของ Buckyball เพื่อทำคะแนนในการแข่งขัน Castle Crasher!
ไปที่พอร์ทัลครูเพื่อดูสื่อและวิดีโอสนับสนุนครูเกี่ยวกับเนื้อหาและการอำนวยความสะดวกของบทเรียน Castle Crasher
บทที่ 1: บทนำ
ในบทเรียนนี้คุณจะได้รับการแนะนำให้รู้จักกับการแข่งขัน Castle Crasher สร้าง BaseBot และเตรียมพร้อมสำหรับการเขียนโค้ด
บทที่ 2: Castle Crasher ไม่มีเซ็นเซอร์
ในบทเรียนนี้คุณจะได้เรียนรู้เกี่ยวกับการคำนวณมุมและการเปลี่ยนความเร็วของหุ่นยนต์ของคุณเพื่อให้คุณสามารถแข่งขันใน Buckyball Blitz Challenge
บทที่ 3: Castle Crasher + เซ็นเซอร์ระยะทาง
ในบทเรียนนี้คุณจะได้เรียนรู้เกี่ยวกับเซ็นเซอร์ระยะทางคืออะไรและสามารถใช้กับหุ่นยนต์ของคุณได้อย่างไร นอกจากนี้คุณยังจะได้เรียนรู้เกี่ยวกับบล็อก [รอจนกว่า] และวิธีใช้ในโครงการ VEXcode EXP จากนั้นคุณจะนำสิ่งที่คุณได้เรียนรู้ไปใช้ในการแข่งขันใน Sense and Sweep Challenge!
บทที่ 4: การสร้างอัลกอริทึม
ในบทเรียนนี้คุณจะได้เรียนรู้เกี่ยวกับออปติคัลเซนเซอร์และวิธีการสร้างอัลกอริทึมที่ใช้ข้อเสนอแนะของเซ็นเซอร์ จากนั้นคุณจะต้องตั้งรหัสให้หุ่นยนต์ของคุณค้นหา Buckyballs โดยอัตโนมัติและผลักพวกมันออกจากสนามในการแข่งขัน Sweep the Field
บทเรียนที่ 5: การแข่งขัน Castle Crasher
ในบทเรียนนี้คุณจะใช้การเรียนรู้ของคุณจากบทเรียนก่อนหน้านี้เพื่อแข่งขันในการแข่งขัน Castle Crasher!

Lesson 6: Conclusion
In this Lesson, you will reflect on the Unit and identify connections between what you have done and a STEM career.
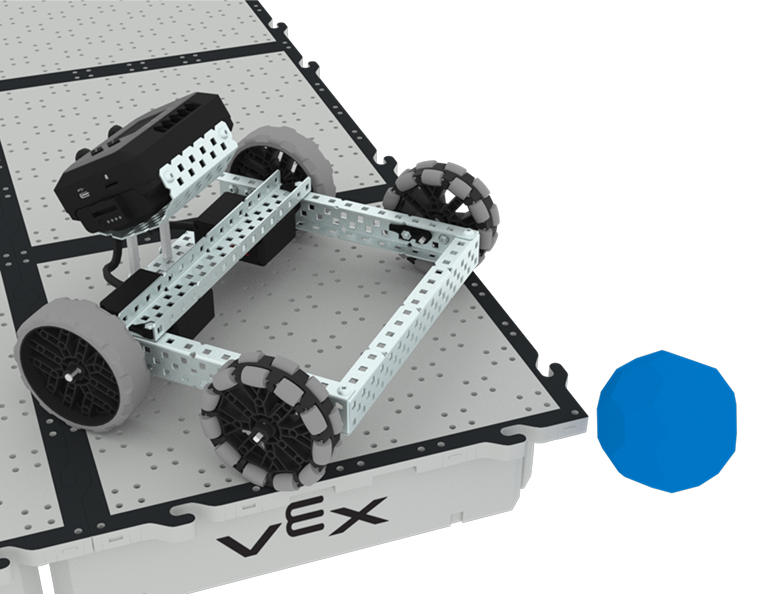
แท็กตรึงทีม
6 บทเรียน
ในหน่วยนี้ คุณจะขับเคลื่อนหุ่นยนต์ของคุณโดยใช้ตัวควบคุม เลือกล้อ และเพิ่มสวิตช์กันชนเพื่อแข่งขันในการแข่งขัน Team Freeze Tag!
เยี่ยมชมพอร์ทัลของครูสำหรับสื่อและวิดีโอสนับสนุนครูเกี่ยวกับเนื้อหาและการอำนวยความสะดวกของบทเรียนแท็กของทีมแช่แข็ง
บทที่ 1: บทนำ
ในบทเรียนนี้คุณจะได้รับการแนะนำให้รู้จักกับการแข่งขัน Team Freeze Tag ตั้งค่าแบตเตอรี่และคอนโทรลเลอร์และสร้าง BaseBot
Lesson 2: Driving with the EXP Controller
In this Lesson, you will learn how to drive the BaseBot using the EXP Controller and practice your driving to compete in a challenge activity as you drive in a figure eight!
บทเรียนที่ 3: การเปลี่ยนล้อ
ในบทเรียนนี้คุณจะได้เรียนรู้วิธีเปลี่ยนล้อของ BaseBot และทดลองใช้ชุดล้อที่แตกต่างกันเพื่อปรับปรุงความสามารถของหุ่นยนต์ในการขับขี่ในรูปที่แปดล้อท้าทาย
บทเรียนที่ 4: การเพิ่มสวิทช์กันชนและการพิมพ์ลงในหน้าจอสมอง
ในบทเรียนนี้คุณจะเพิ่มสวิตช์กันชนลงใน BaseBot ของคุณและเรียนรู้วิธีพิมพ์ลงบนหน้าจอสมองเพื่อแข่งขันในแท็กแช่แข็งแบบ 1 ต่อ 1!
บทที่ 5: การแข่งขันแท็กแช่แข็งแบบทีม
ในบทเรียนนี้คุณจะรวมทักษะทั้งหมดที่ได้เรียนรู้ในบทเรียนก่อนหน้านี้เพื่อเล่นเกมแท็กแช่แข็งของทีม!
บทที่ 6: บทสรุป
ในบทเรียนนี้คุณจะได้ทบทวนหน่วยและระบุความเชื่อมโยงระหว่างสิ่งที่คุณทำกับอาชีพ STEM