
زعيم الدائري
6 دروس
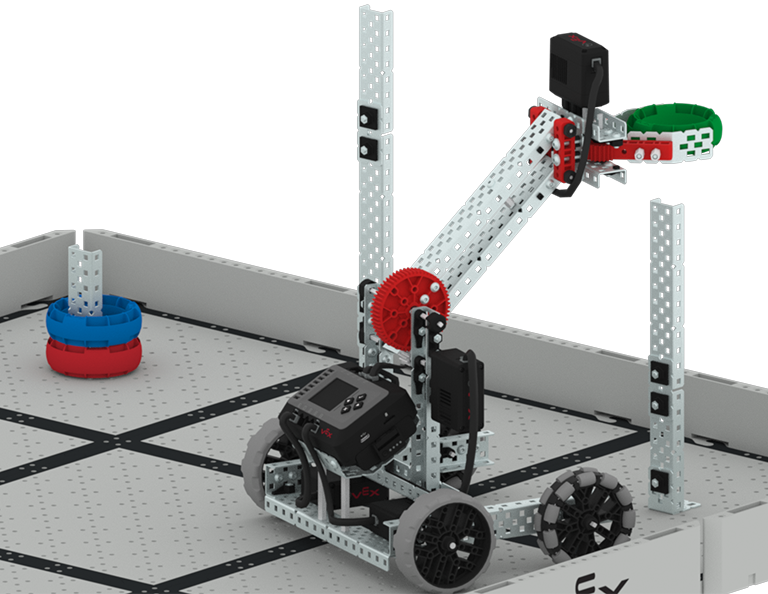
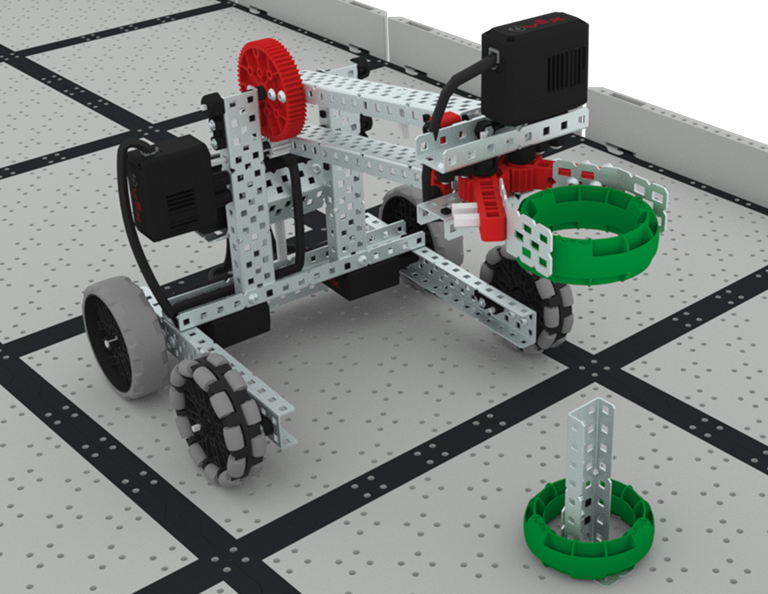
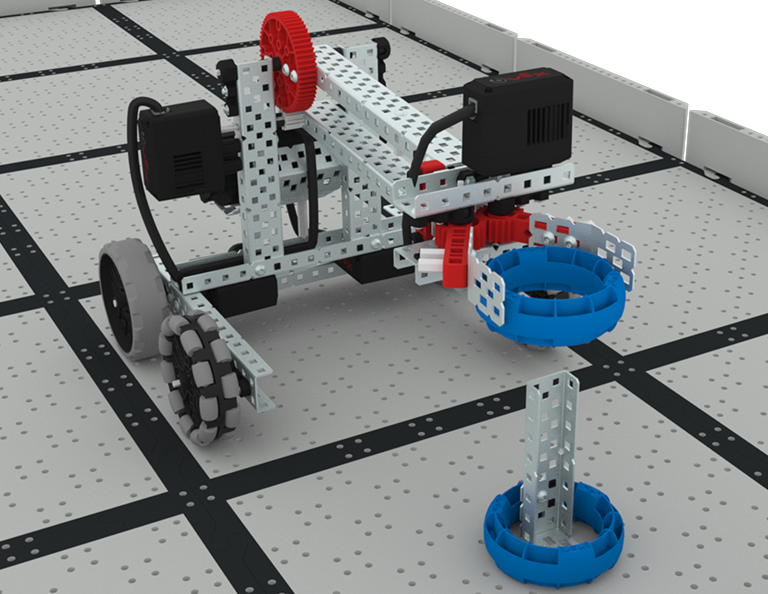
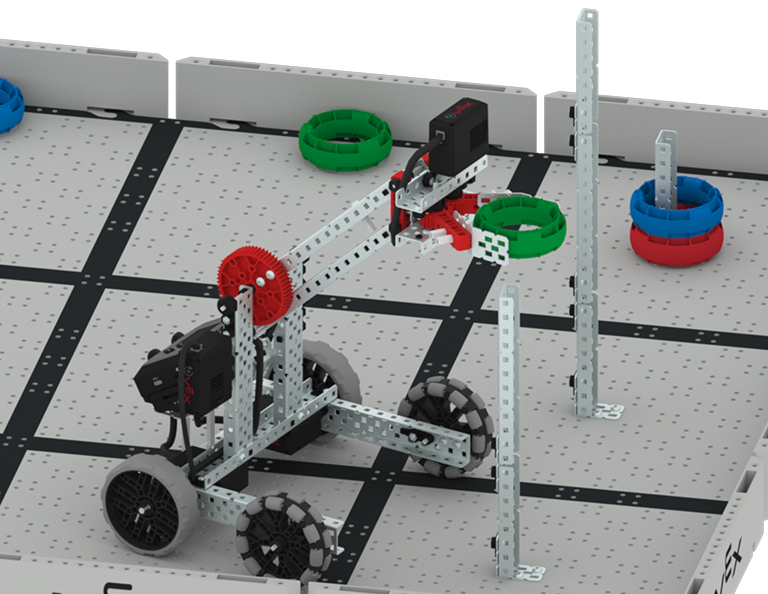
في هذه الوحدة، ستكتشف الفرق بين التحكم في السائق والحركة الذاتية، حيث تستخدم برامج متعددة (التحكم الذاتي والتحكم في السائق) من أجل تسجيل حلقات على مشاركات مختلفة الحجم في مسابقة Ring Leader!
قم بزيارة بوابة المعلم للحصول على مواد ومقاطع فيديو لدعم المعلم حول محتوى وتيسير درس Ring Leader.
الدرس 1: المقدمة
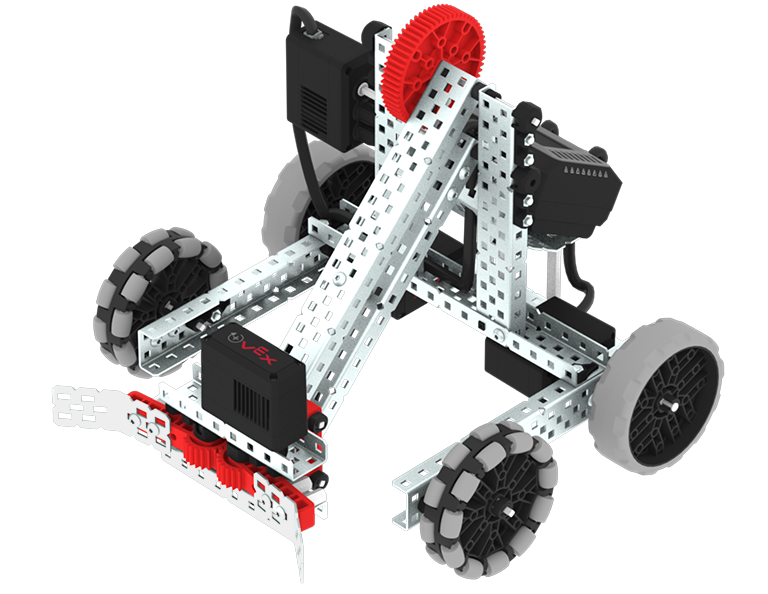
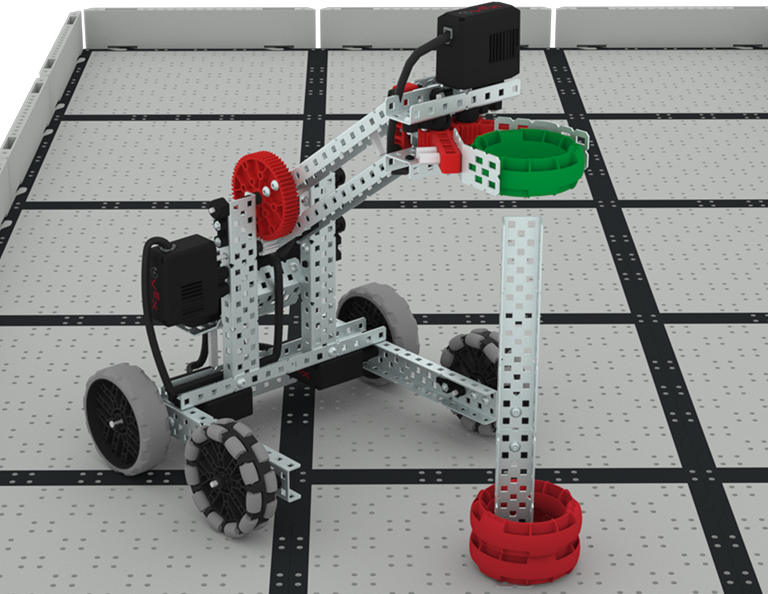
في هذا الدرس، سيتم تعريفك بمسابقة Ring Leader، وبناء Clawbot، والاستعداد للترميز.
الدرس 2: التحكم بالسائق
في هذا الدرس، ستتعرف على استخدام برنامج التحكم بالسائق في EXP Brain حتى تتمكن من قيادة Clawbot لمعالجة الحلقات في الملعب والمشاركة في تحدي السرعة والنتيجة.
الدرس 3: الترميز للحركات المستقلة
في هذا الدرس، ستتعلم كيفية ترميز الروبوت الخاص بك للحركات المستقلة بما في ذلك كيفية تخطيط مسار الروبوت الخاص بك. بعد ذلك، ستقوم بإنشاء مشروع خبرة VEXcode لوضع حلقات على المشاركات في تحدي أزمة الترميز.
الدرس 4: استخدام برامج متعددة (مستقل وسائق)
في هذا الدرس، ستتعرف على كيفية تخصيص عناصر تحكم الشركاء السائقين وكيف يمكنك استخدام خبرة وحدة التحكم وVEXcode لتحسين استراتيجية الشريك السائق للمنافسة في تحدي قرار التقسيم.
الدرس 5: مسابقة Ring Leader
في هذا الدرس، ستطبق ما تعلمته من الدروس السابقة للتنافس في مسابقة Ring Leader!
الدرس 6: الخاتمة
في هذا الدرس، ستفكر في الوحدة وتحدد الروابط بين ما قمت به ومهنة العلوم والتكنولوجيا والهندسة والرياضيات المرتبطة بها.