
Chef de file
6 Cours
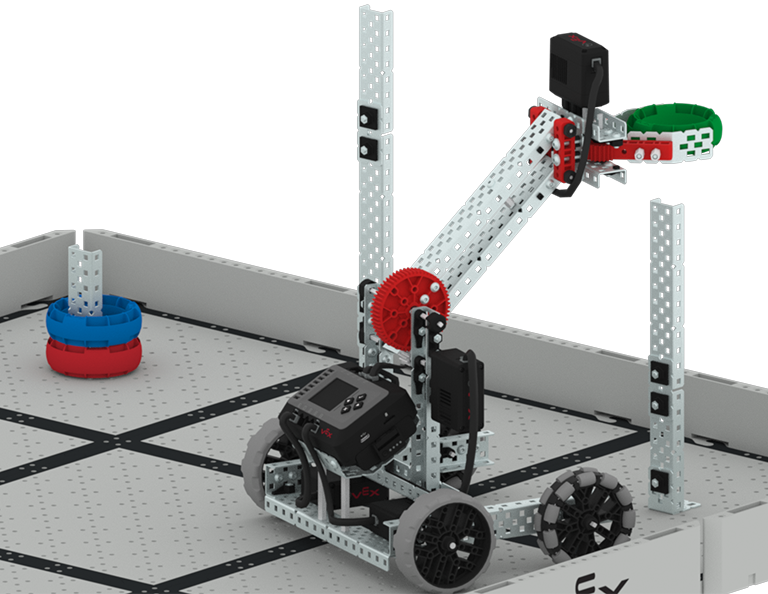
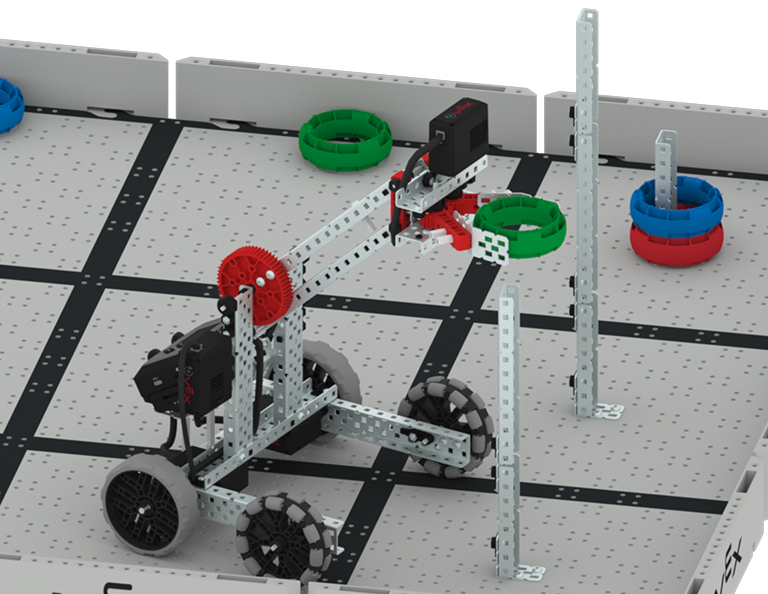
Dans cette unité, vous explorerez la différence entre le contrôle du conducteur et le mouvement autonome, en utilisant plusieurs programmes (autonome et contrôle du conducteur) afin de marquer des anneaux sur des poteaux de différentes tailles dans la compétition Ring Leader !
Visitez le portail des enseignants pour accéder au matériel de soutien aux enseignants et aux vidéos sur le contenu et l'animation de la leçon Ring Leader.
Leçon 1 : Introduction
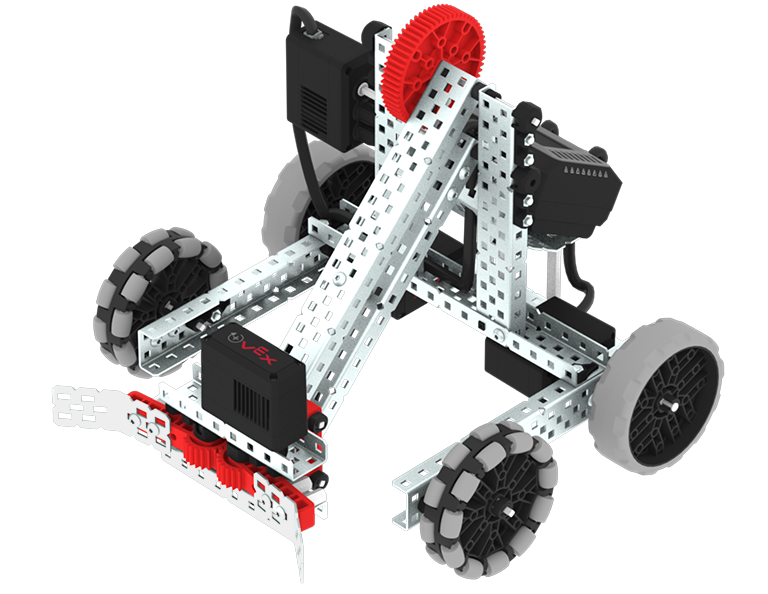
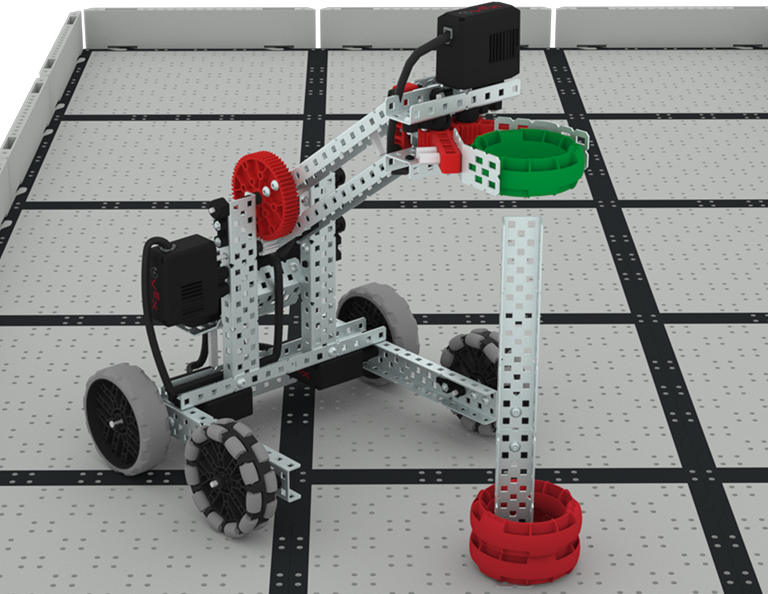
Dans cette leçon, vous découvrirez le concours Ring Leader, construisez le Clawbot et préparez-vous à coder.
Leçon 2 : Contrôle du conducteur
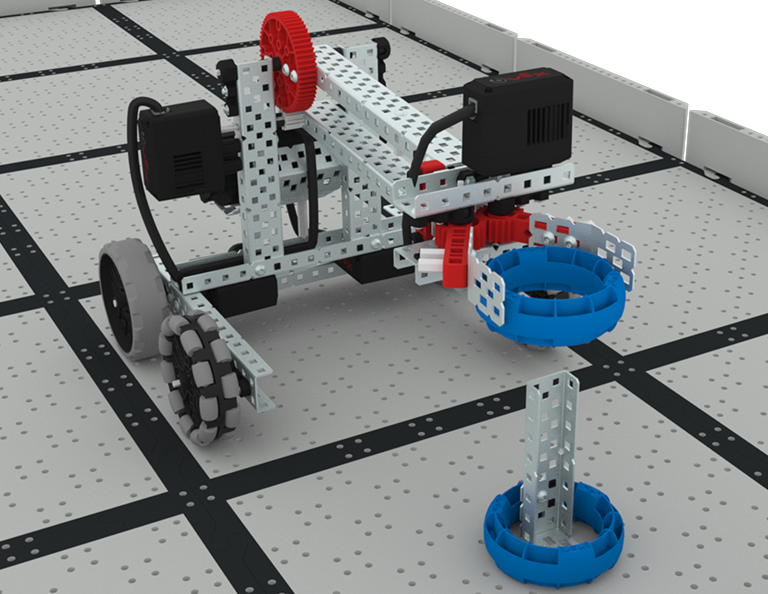
Dans cette leçon, vous apprendrez à utiliser le programme de contrôle du conducteur sur le cerveau EXP afin de pouvoir conduire le Clawbot pour manipuler des anneaux sur le terrain et participer au défi Vitesse et score.
Leçon 3 : Codage des mouvements autonomes
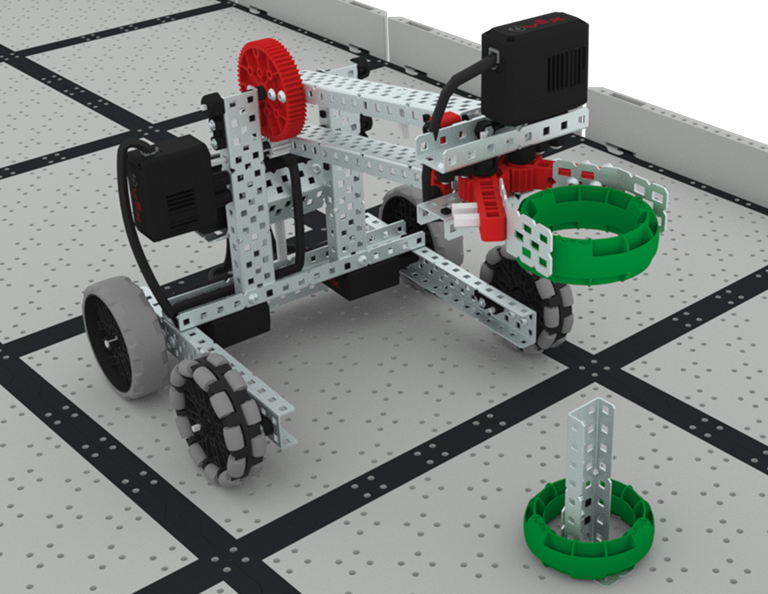
Dans cette leçon, vous apprendrez à coder votre robot pour des mouvements autonomes, y compris comment planifier la trajectoire de votre robot. Ensuite, vous créerez un projet EXP VEXCODE pour placer des anneaux sur les publications du Coding Crunch Challenge.
Leçon 4 : Utilisation de plusieurs programmes (autonomes et pilotes)
Dans cette leçon, vous apprendrez comment personnaliser les contrôles des pilotes et comment utiliser le contrôleur et le VEXcode EXP pour optimiser votre stratégie de pilote pour participer au Split Decision Challenge.
Leçon 5 : Concours de Ring Leader
Dans cette leçon, vous appliquerez les enseignements des leçons précédentes pour participer au concours Ring Leader !
Leçon 6 : Conclusion
Dans cette leçon, vous réfléchirez à l'unité et identifierez les liens entre ce que vous avez fait et une carrière STEM connectée.