
ผู้นำแหวน
6 บทเรียน
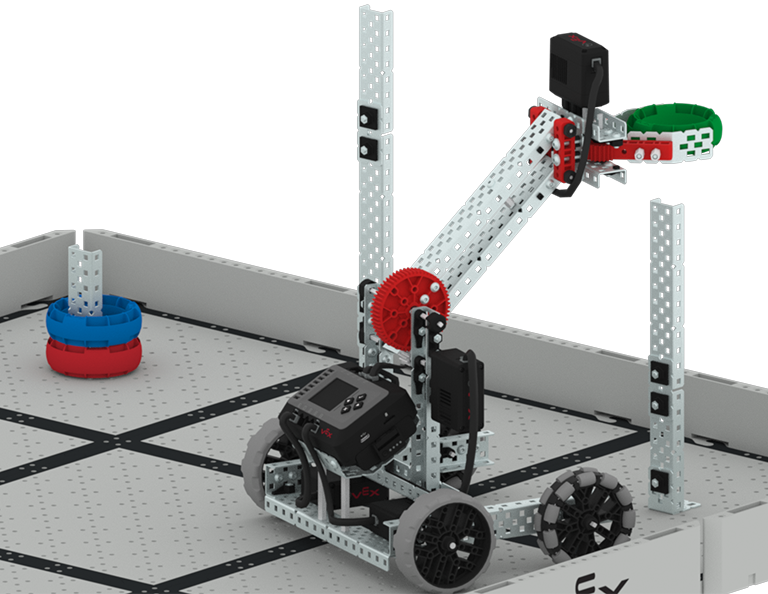
ในบทนี้ คุณจะได้สำรวจความแตกต่างระหว่างการควบคุมผู้ขับและการเคลื่อนไหวอัตโนมัติ เมื่อคุณใช้หลายโปรแกรม (การควบคุมอัตโนมัติและการควบคุมผู้ขับ) เพื่อให้คะแนนวงแหวนบนโพสต์ที่มีขนาดต่างกันในการแข่งขัน Ring Leader
ไปที่พอร์ทัลของครูเพื่อดูสื่อและวิดีโอสนับสนุนครูเกี่ยวกับเนื้อหาและการอำนวยความสะดวกของบทเรียน Ring Leader
บทที่ 1: บทนำ
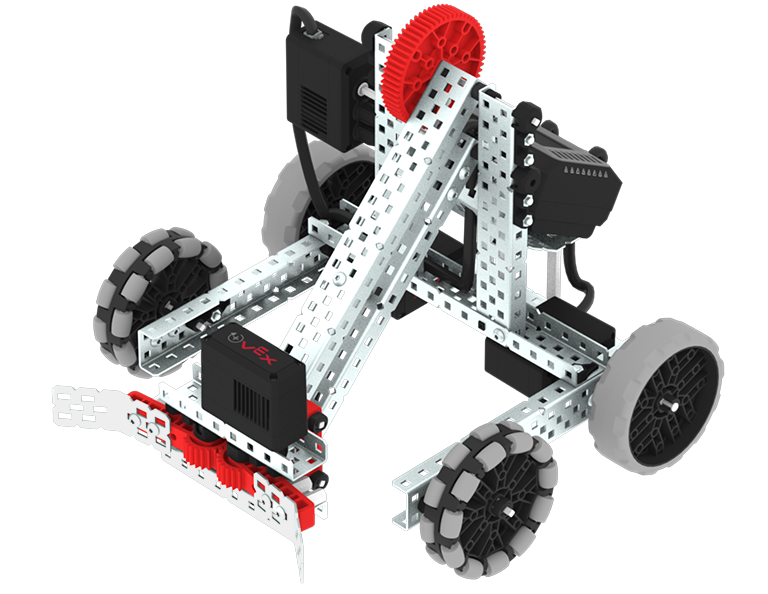
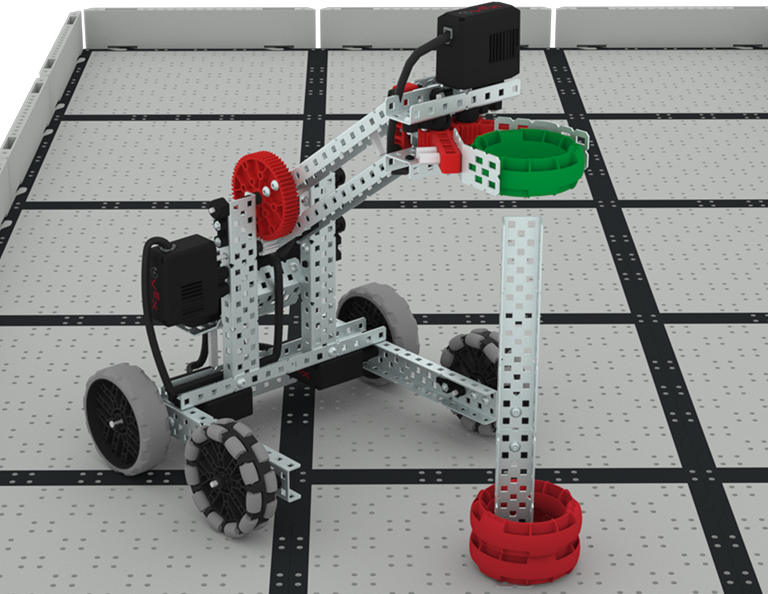
ในบทเรียนนี้คุณจะได้รับการแนะนำให้รู้จักกับการแข่งขันผู้นำแหวนสร้าง Clawbot และเตรียมพร้อมที่จะเขียนโค้ด
บทที่ 2: การควบคุมผู้ขับขี่
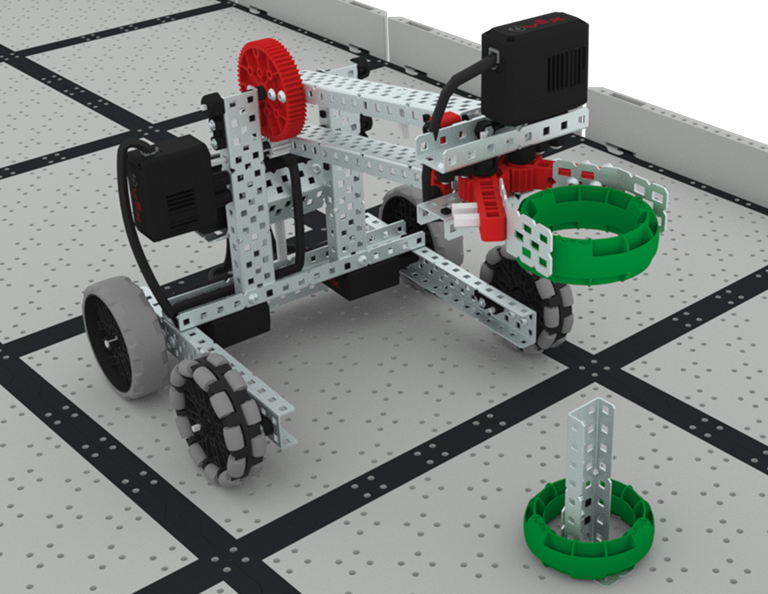
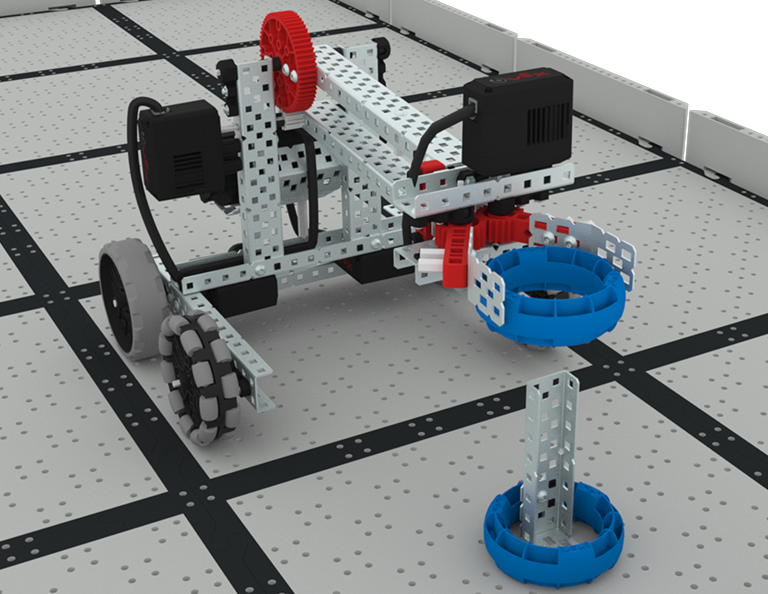
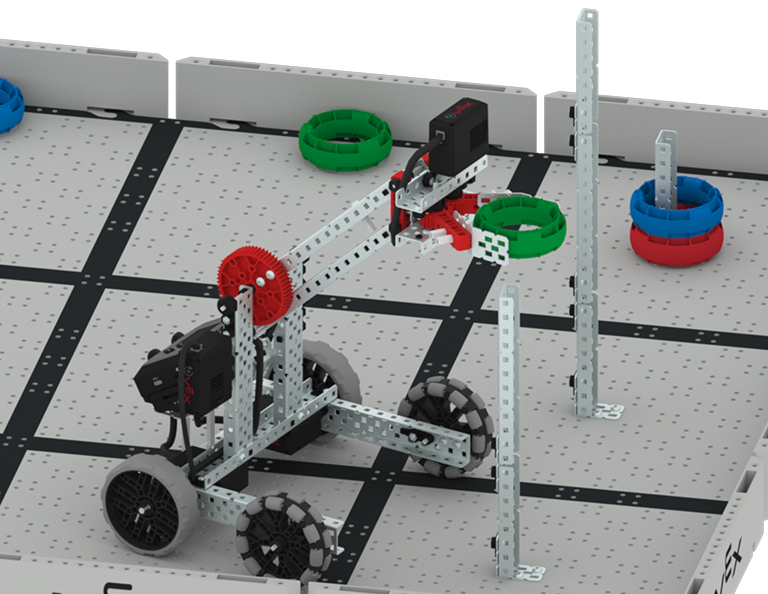
ในบทเรียนนี้คุณจะได้เรียนรู้เกี่ยวกับการใช้โปรแกรมควบคุมผู้ขับขี่บนสมอง EXP เพื่อให้คุณสามารถขับ Clawbot เพื่อจัดการวงแหวนในสนามและเข้าร่วมในการท้าทายความเร็วและคะแนน
บทที่ 3: การเข้ารหัสสำหรับการเคลื่อนไหวอัตโนมัติ
ในบทเรียนนี้คุณจะได้เรียนรู้เกี่ยวกับการเข้ารหัสหุ่นยนต์ของคุณสำหรับการเคลื่อนไหวอัตโนมัติรวมถึงวิธีการวางแผนเส้นทางของหุ่นยนต์ของคุณ จากนั้นคุณจะสร้างโครงการ VEXcode EXP เพื่อวางแหวนบนโพสต์ใน Coding Crunch Challenge
บทที่ 4: การใช้โปรแกรมหลายโปรแกรม (อัตโนมัติและไดรเวอร์)
ในบทเรียนนี้คุณจะได้เรียนรู้เกี่ยวกับการปรับแต่งการควบคุมไดรเวอร์และวิธีที่คุณสามารถใช้ Controller และ VEXcode EXP เพื่อเพิ่มประสิทธิภาพกลยุทธ์ไดรเวอร์ของคุณสำหรับการแข่งขันใน Split Decision Challenge
บทที่ 5: การแข่งขันริงลีดเดอร์
ในบทเรียนนี้คุณจะใช้การเรียนรู้ของคุณจากบทเรียนก่อนหน้านี้เพื่อแข่งขันในการแข่งขันผู้นำแหวน!
บทที่ 6: บทสรุป
ในบทเรียนนี้คุณจะได้ทบทวนหน่วยและระบุความเชื่อมโยงระหว่างสิ่งที่คุณทำกับอาชีพ STEM ที่เชื่อมโยงกัน