
Při programování robota pro zvedání a umisťování předmětů je klíčová jeho orientace. V této lekci se naučíte, jak přesně pohybovat a otáčet robotem, abyste zvedli předmět. Také se naučíte, jak použít blok Place object k jeho doručení na konkrétní místo.
Podívejte se na video níže a dozvíte se více o:
- Jak orientace robota závisí na směru, kterým je otočen jeho kopák.
- Jak naprogramovat robota, aby přesně zvedal a umisťoval předměty.
Nyní, když jste si video prohlédli, si zaznamenejte své myšlenky do deníku. Odpovězte na tyto otázky, které vám pomohou usměrnit vaše myšlení a připravit se na diskusi s celou třídou:
- Jaké aspekty si myslíte, že budou důležité při programování robota pro zvedání a umisťování předmětů? Uveďte alespoň dva nápady.
- Jak si myslíte, že se musí robot pohybovat, aby magnetem úspěšně zvedl předmět? Buďte konkrétní.
- Jaké důkazy z videa podporujete ve svých myšlenkách?
Jaké máte otázky ohledně programování robota pro zvedání a umisťování předmětů?
Nyní, když jste si video prohlédli, si zaznamenejte své myšlenky do deníku. Odpovězte na tyto otázky, které vám pomohou usměrnit vaše myšlení a připravit se na diskusi s celou třídou:
- Jaké aspekty si myslíte, že budou důležité při programování robota pro zvedání a umisťování předmětů? Uveďte alespoň dva nápady.
- Jak si myslíte, že se musí robot pohybovat, aby magnetem úspěšně zvedl předmět? Buďte konkrétní.
- Jaké důkazy z videa podporujete ve svých myšlenkách?
Jaké máte otázky ohledně programování robota pro zvedání a umisťování předmětů?
Poté, co si studenti shlédnou video a před procvičováním, se sejděte k diskusi s celou třídou. Použijte odpovědi studentů na zadané otázky jako základ pro diskusi.
Při programování robota pro zvedání předmětů je nezbytné robota orientovat tak, aby byl nakopávací mechanismus zarovnán s předmětem, který má být zvednut. Připomeňte studentům polohu magnetu a to, jak budou muset v podstatě „projet“ předmětem, aby ho zvedli. Veďte studenty k zamyšlení nad tím, jak by museli naprogramovat robota, aby zvedl a přesunul předmět, který není přímo před robotem.
Řízená praxe
Teď, když jste si video prohlédli a probrali, je řada na vás, abyste si procvičili!
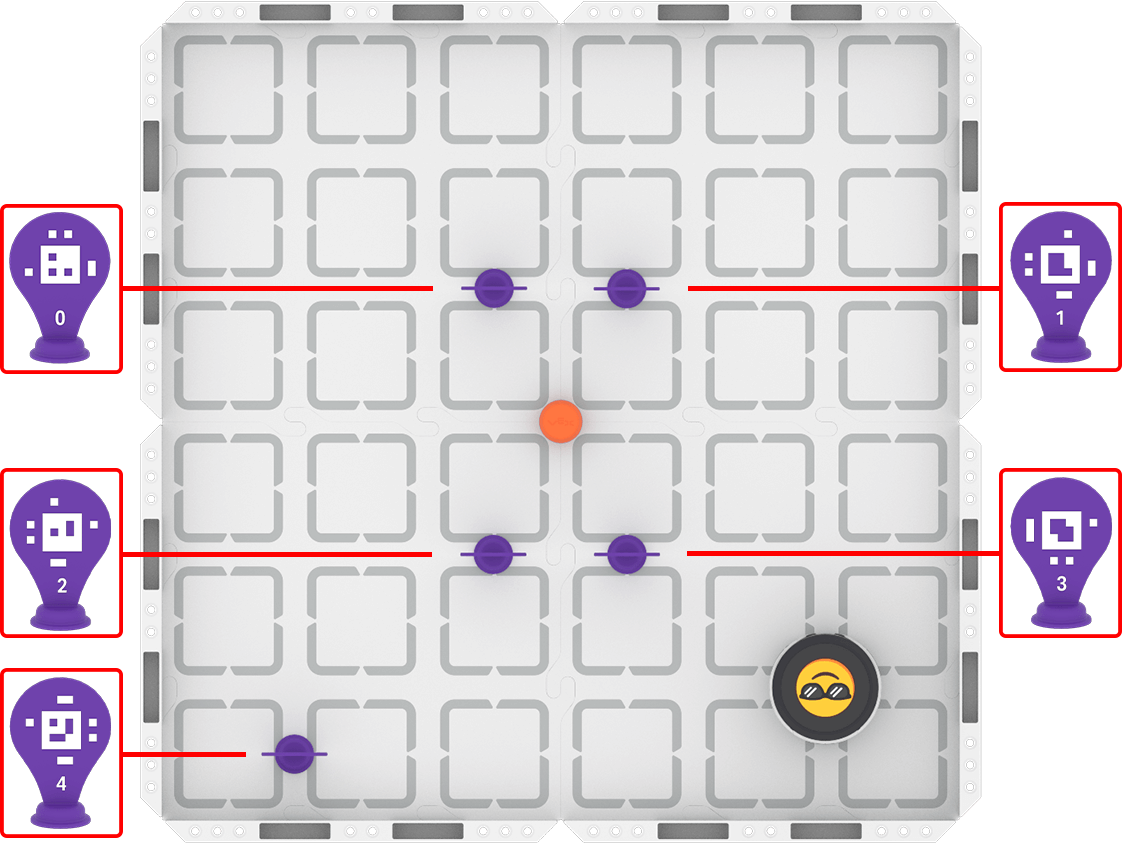
Krok 1: Nastavte si pole, jak je znázorněno na obrázku níže.
Krok 2: Použijte režim Pohon k modelování pohybů, které musí váš robot provést k dokončení úkolu.
- Vaším úkolem je řídit robota mezi AprilTagy, aby zvedl sud a umístil ho před AprilTag s ID 4. Zdokumentujte si řízení a poté si naplánujte, jak tento pohyb kódovat.
- Použijte tuto kartu s úkolem (Google / .docx / .pdf) jako vodítko pro váš procvičovací postup.
- Tip pro profesionály: Věnujte zvýšenou pozornost orientaci robota, aby sud úspěšně zvedl a odložil před AprilTag ID 4.
Krok 3: Naprogramujte robota tak, aby dokončil úkol.
- Vaším úkolem je pomocí plánu trasy z kroku 2 naprogramovat robota tak, aby projížděl mezi AprilTagy, vyzvedl sud a poté ho doručil k AprilTagu s ID 4.
- Použijte tuto kartu s úkolem (Google / .docx / .pdf) jako vodítko pro váš procvičovací postup.
- Tip pro profesionály: Zvažte, jak naprogramujete svého robota, aby se v této výzvě přesně otáčel, s využitím předchozích znalostí z kurzu.
Krok 4: Použijte proces Predikce-Řízení-Měření-Kód k iteraci a zlepšení přesnosti pohybů robota při zvedání a doručování předmětů.
- Předpovědět
- Vyberte první měření, které potřebujete upravit. Vytvořte skupinovou předpověď o tom, jak zlepšit měření vzdálenosti nebo úhlu pomocí této větné základny, a zapište si ji do deníku:
- Myslíme si, že vzdálenost/úhel by měl být přibližně ____________ milimetrů/palců/stupňů.
- Vyberte první měření, které potřebujete upravit. Vytvořte skupinovou předpověď o tom, jak zlepšit měření vzdálenosti nebo úhlu pomocí této větné základny, a zapište si ji do deníku:
- Pohon
- Otestujte si svou předpověď řízením robota. Zaznamenejte si veškerá pozorování, která během řízení učiníte a která by vám mohla pomoci zlepšit vaši přesnost.
- Opatření
- Umístěte robotický úhloměr pod robota nebo použijte pravítko k změření bodu, ve kterém robot přestal jet.
- Kód
- Použijte upravené měření ve svém kódovacím projektu! Spusťte to pro otestování. Zlepšila provedená úprava přesnost a usnadnila zvedání a nasazování hlavně? Pokud ne, opakujte postup a zkuste to znovu. Nezapomeňte si během práce zaznamenávat svá měření a pozorování do deníku.
Zdroje pro praxi:
Pokud budete při provádění aktivity potřebovat další podporu, jsou k dispozici články, na které zde odkazujeme.
Teď, když jste si video prohlédli a probrali, je řada na vás, abyste si procvičili!
Krok 1: Nastavte si pole, jak je znázorněno na obrázku níže.
Krok 2: Použijte režim Pohon k modelování pohybů, které musí váš robot provést k dokončení úkolu.
- Vaším úkolem je řídit robota mezi AprilTagy, aby zvedl sud a umístil ho před AprilTag s ID 4. Zdokumentujte si řízení a poté si naplánujte, jak tento pohyb kódovat.
- Použijte tuto kartu s úkolem (Google / .docx / .pdf) jako vodítko pro váš procvičovací postup.
- Tip pro profesionály: Věnujte zvýšenou pozornost orientaci robota, aby sud úspěšně zvedl a odložil před AprilTag ID 4.
Krok 3: Naprogramujte robota tak, aby dokončil úkol.
- Vaším úkolem je pomocí plánu trasy z kroku 2 naprogramovat robota tak, aby projížděl mezi AprilTagy, vyzvedl sud a poté ho doručil k AprilTagu s ID 4.
- Použijte tuto kartu s úkolem (Google / .docx / .pdf) jako vodítko pro váš procvičovací postup.
- Tip pro profesionály: Zvažte, jak naprogramujete svého robota, aby se v této výzvě přesně otáčel, s využitím předchozích znalostí z kurzu.
Krok 4: Použijte proces Predikce-Řízení-Měření-Kód k iteraci a zlepšení přesnosti pohybů robota při zvedání a doručování předmětů.
- Předpovědět
- Vyberte první měření, které potřebujete upravit. Vytvořte skupinovou předpověď o tom, jak zlepšit měření vzdálenosti nebo úhlu pomocí této větné základny, a zapište si ji do deníku:
- Myslíme si, že vzdálenost/úhel by měl být přibližně ____________ milimetrů/palců/stupňů.
- Vyberte první měření, které potřebujete upravit. Vytvořte skupinovou předpověď o tom, jak zlepšit měření vzdálenosti nebo úhlu pomocí této větné základny, a zapište si ji do deníku:
- Pohon
- Otestujte si svou předpověď řízením robota. Zaznamenejte si veškerá pozorování, která během řízení učiníte a která by vám mohla pomoci zlepšit vaši přesnost.
- Opatření
- Umístěte robotický úhloměr pod robota nebo použijte pravítko k změření bodu, ve kterém robot přestal jet.
- Kód
- Použijte upravené měření ve svém kódovacím projektu! Spusťte to pro otestování. Zlepšila provedená úprava přesnost a usnadnila zvedání a nasazování hlavně? Pokud ne, opakujte postup a zkuste to znovu. Nezapomeňte si během práce zaznamenávat svá měření a pozorování do deníku.
Zdroje pro praxi:
Pokud budete při provádění aktivity potřebovat další podporu, jsou k dispozici články, na které zde odkazujeme.
Před zahájením práce ve skupině studentům připomeňte jejich stanovená očekávání.
Rozdejte každému studentovi kartu s úkolem z kroku(Google / .docx / .pdf). Připomeňte studentům, že cílem řízení je zajistit, aby si všichni ve skupině vytvořili společný mentální model toho, jak by se měl robot pohybovat, aby úkol úspěšně splnil. Povzbuďte studenty, aby si dávali pozor na to, jak dokumentují svá řízení, protože tuto praxi použijí jako dokumentaci k tvorbě vlastního kódu.
Zatímco studenti řídí, se pohybujte po místnosti a informujte se s nimi o tom, jak se učí. Ptejte se na otázky typu:
- Jaké specifické pohyby musí váš robot provést, aby úkol úspěšně dokončil?
- Jaké detaily o pohybech vašeho robota zaznamenáváte? Proč jste si vybrali právě je? Existují další důležité podrobnosti, které byste měli uvést?
- Jak vaše skupina spolupracuje na plánování dráhy robota? Jakou roli hraje každý člověk?
Rozdejte každému studentovi kartu s úkolem 1 z kroku (Google / .docx / .pdf) poté, co splní kritéria úspěšnosti pro řízení a podělí se s vámi o svou plánovanou trasu. Studenti poté použijí svůj plán k vytvoření svých prvních projektů VEXcode. Připomeňte jim, aby své projekty vytvářeli a testovali postupně.
Zatímco studenti programují robota, procházejte místností a informujte se s nimi o jejich pokroku a učení. Ptejte se na otázky typu:
- Jaký pohyb jste v této fázi vašeho projektu naprogramovali? Co bude následovat a jak to poznáte?
- Proč je pořadí bloků důležité pro pohyb robota? Jak si vaše skupina vybrala tuto sekvenci?
- Jaké kroky můžete podniknout, pokud se robot pohybuje jinak, než jste očekávali? Jak k řešení tohoto problému přistupujete?
Jakmile mají studenti úvodní kódovací projekt, který dokončí úkol, měli by přejít ke kroku 4 a začít iterovat Studenti by měli používat proces Predikce-Řízení-Změření-Kód , který jim pomůže vylepšit jednu věc v pohybu robota najednou, aby dosáhli přesnosti potřebné ke zvednutí a pohybu hlavně. Pro usnadnění tohoto procesu si položte otázky, jako například:
- Jak vám předvídání potřebných měření před jízdou pomáhá zlepšit přesnost pohybů vašeho robota?
- Vysvětlete, jak prováděné úpravy zlepšují schopnost robota zvednout a umístit sud.
- Jak se vaše měření zlepšila nebo změnila během několika pokusů a co jste se z těchto iterací naučili?
- Jakým způsobem spolupracujete na rozhodování o tom, které části projektu změnit? Jak se shodujete na tom, jakou změnu provést?
Shrnutí
Teď, když jste si to procvičili, je čas podělit se o to, co jste se naučili. Odpovězte na následující otázky ve svém deníku, které vám pomohou zamyslet se nad svými vědomostmi a připravit se na diskusi s celou třídou:
- Jaká byla tvá strategie pro zvednutí a umístění sudu, abys splnil/a úkol? Buďte ve svém vysvětlení důkladní. Proč si myslíte, že vaše strategie byla úspěšná?
- Jak jste k dokončení úkolu použili režim Drive a VEXcode? Jak vaše skupina spolupracovala na obou částech praxe?
- Jakou radu byste dali někomu, kdo se poprvé učí programovat robota pro zvedání a umisťování předmětů? Proč si myslíš, že by tvoje rada byla užitečná?
Teď, když jste si to procvičili, je čas podělit se o to, co jste se naučili. Odpovězte na následující otázky ve svém deníku, které vám pomohou zamyslet se nad svými vědomostmi a připravit se na diskusi s celou třídou:
- Jaká byla tvá strategie pro zvednutí a umístění sudu, abys splnil/a úkol? Buďte ve svém vysvětlení důkladní. Proč si myslíte, že vaše strategie byla úspěšná?
- Jak jste k dokončení úkolu použili režim Drive a VEXcode? Jak vaše skupina spolupracovala na obou částech praxe?
- Jakou radu byste dali někomu, kdo se poprvé učí programovat robota pro zvedání a umisťování předmětů? Proč si myslíš, že by tvoje rada byla užitečná?
Veďte studenty ke sdílení svých znalostí v diskusi s celou třídou. Pomozte studentům reflektovat své učení prostřednictvím praxe, aby se sblížili ke společnému porozumění nebo cílům učení.
Jako výchozí bod pro diskusi použijte otázky, na které studenti odpověděli ve svých denících. Při poslechu příspěvků studentů se jich ptejte na doplňující otázky, které jim pomohou lépe porozumět:
- Pro sdílení strategie:
S jakými problémy se vaše skupina potýkala při zvedání a umisťování sudu a jak jste je překonali?
Jaké další strategické nápady jste zvažoval/a před svým rozhodnutím? Proč jste zvolil/a právě tuto strategii?
- Pro kódování:
- Můžete popsat okamžik, kdy vám řízení robota pomohlo učinit lepší rozhodnutí v kódování?
- Jaké bloky jste použili k naprogramování robota tak, aby se přesně orientoval na hlavni a AprilTagu?
- Pro spolupráci:
- Jak každý člen vaší skupiny přispěl k řízení a programování?
Vytvořte sdílený seznam rad pro programování robota pro zvedání a umisťování předmětů. Tento seznam může být živým dokumentem, protože studenti jej mohou doplňovat a upravovat s tím, jak se jejich znalosti prohlubují.
Vyberte Další > pro přechod na další lekci.