
เมื่อคุณเขียนโค้ดให้หุ่นยนต์ของคุณหยิบและวางวัตถุ การวางแนวของหุ่นยนต์ของคุณถือเป็นสิ่งสำคัญ ในบทเรียนนี้ คุณจะได้เรียนรู้การเคลื่อนย้ายและหมุนหุ่นยนต์อย่างแม่นยำเพื่อหยิบวัตถุ คุณยังจะได้เรียนรู้วิธีใช้บล็อก Place object เพื่อส่งไปยังตำแหน่งที่ระบุอีกด้วย
ชมวิดีโอด้านล่างเพื่อเรียนรู้เกี่ยวกับ:
- การวางแนวของหุ่นยนต์ของคุณจะขึ้นอยู่กับทิศทางที่เตะของหุ่นยนต์หันหน้าไป
- วิธีการเขียนโค้ดให้หุ่นยนต์หยิบและวางวัตถุได้อย่างแม่นยำ
ตอนนี้คุณได้ชมวิดีโอแล้ว ให้บันทึกความคิดของคุณลงในสมุดบันทึก ตอบคำถามเหล่านี้เพื่อเป็นแนวทางในการคิดของคุณและช่วยคุณเตรียมความพร้อมสำหรับการอภิปรายทั้งชั้นเรียน:
- คุณคิดว่าข้อควรพิจารณาอะไรบ้างที่จะสำคัญเมื่อเขียนโค้ดหุ่นยนต์เพื่อหยิบและวางวัตถุ? ระบุไอเดียอย่างน้อยสองข้อ
- คุณคิดว่าหุ่นยนต์จะต้องเคลื่อนไหวอย่างไรเพื่อหยิบวัตถุด้วยแม่เหล็กได้สำเร็จ? ให้เจาะจง
- คุณมีหลักฐานอะไรจากวิดีโอที่สนับสนุนความคิดของคุณบ้าง?
คุณมีคำถามอะไรบ้างเกี่ยวกับการเขียนโค้ดให้หุ่นยนต์หยิบและวางวัตถุ?
ตอนนี้คุณได้ชมวิดีโอแล้ว ให้บันทึกความคิดของคุณลงในสมุดบันทึก ตอบคำถามเหล่านี้เพื่อเป็นแนวทางในการคิดของคุณและช่วยคุณเตรียมความพร้อมสำหรับการอภิปรายทั้งชั้นเรียน:
- คุณคิดว่าข้อควรพิจารณาอะไรบ้างที่จะสำคัญเมื่อเขียนโค้ดหุ่นยนต์เพื่อหยิบและวางวัตถุ? ระบุไอเดียอย่างน้อยสองข้อ
- คุณคิดว่าหุ่นยนต์จะต้องเคลื่อนไหวอย่างไรเพื่อหยิบวัตถุด้วยแม่เหล็กได้สำเร็จ? ให้เจาะจง
- คุณมีหลักฐานอะไรจากวิดีโอที่สนับสนุนความคิดของคุณบ้าง?
คุณมีคำถามอะไรบ้างเกี่ยวกับการเขียนโค้ดให้หุ่นยนต์หยิบและวางวัตถุ?
หลังจากที่นักเรียนชมวิดีโอแล้วและก่อนที่จะฝึกซ้อม จะมารวมกันเพื่ออภิปรายทั้งชั้นเรียน ใช้คำตอบของนักเรียนต่อคำถามที่ให้ไว้เป็นพื้นฐานสำหรับการอภิปราย
ในการเขียนโค้ดให้หุ่นยนต์หยิบสิ่งของ สิ่งสำคัญคือต้องวางหุ่นยนต์ให้ตัวเตะอยู่ในแนวเดียวกับวัตถุที่จะหยิบ เตือนนักเรียนเกี่ยวกับตำแหน่งของแม่เหล็กและวิธีการที่พวกเขาจะต้อง "ขับผ่าน" วัตถุเพื่อหยิบมันขึ้นมา แนะนำให้นักเรียนพิจารณาว่าจะต้องเขียนโค้ดหุ่นยนต์อย่างไรเพื่อหยิบและเคลื่อนย้ายวัตถุที่ไม่ได้อยู่ตรงหน้าหุ่นยนต์
การฝึกปฏิบัติแบบมีคำแนะนำ
ตอนนี้คุณได้ดูและอภิปรายวิดีโอแล้ว ถึงเวลาฝึกฝนแล้ว!
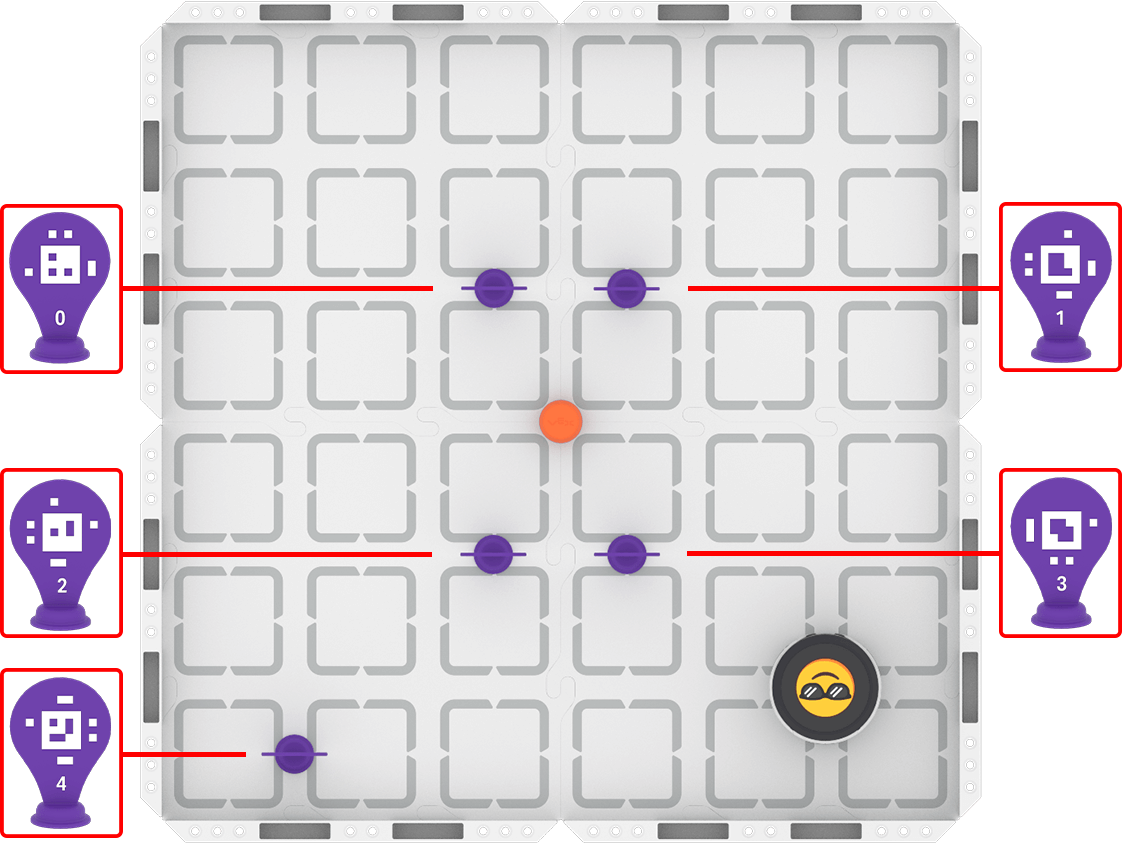
ขั้นตอนที่ 1: ตั้งค่าฟิลด์ของคุณตามที่แสดงในภาพด้านล่าง
ขั้นตอนที่ 2: ใช้โหมดขับเคลื่อนเพื่อสร้างแบบจำลองการเคลื่อนไหวที่หุ่นยนต์ของคุณต้องทำเพื่อทำงานให้เสร็จสมบูรณ์
- งานของคุณคือขับหุ่นยนต์ระหว่าง AprilTags เพื่อหยิบถังและวางไว้ข้างหน้า AprilTag ID 4 บันทึกการขับขี่ของคุณ จากนั้นวางแผนว่าจะเข้ารหัสการเคลื่อนไหวนั้นอย่างไร
- ใช้บัตรงานนี้ (Google / .docx / .pdf) เพื่อเป็นแนวทางในการฝึกฝนของคุณ
- เคล็ดลับสำหรับมืออาชีพ: ให้ความสนใจเป็นพิเศษกับวิธีที่หุ่นยนต์ต้องวางแนวเพื่อหยิบถังได้สำเร็จ และวางไว้ข้างหน้า AprilTag ID
ขั้นตอน 3: เขียนโค้ดให้หุ่นยนต์ทำงานให้สำเร็จ
- งานของคุณคือใช้แผนเส้นทางจากขั้นตอนที่ 2 เพื่อเขียนโค้ดให้หุ่นยนต์ขับระหว่าง AprilTags เพื่อหยิบถัง จากนั้นส่งมอบให้กับ AprilTag ID 4
- ใช้บัตรงานนี้ (Google / .docx / .pdf) เพื่อเป็นแนวทางในการฝึกฝนของคุณ
- เคล็ดลับ: พิจารณาว่าคุณจะเขียนโค้ดหุ่นยนต์ของคุณให้หมุนได้อย่างแม่นยำอย่างไรในความท้าทายนี้ โดยใช้ความรู้ก่อนหน้าจากหลักสูตร
ขั้นตอน 4: ใช้กระบวนการ Predict-Drive-Measure-Code เพื่อทำซ้ำและปรับปรุงความแม่นยำของการเคลื่อนไหวของหุ่นยนต์ในขณะที่หยิบและส่งมอบวัตถุ
- ทำนาย
- เลือกการวัดครั้งแรกที่คุณต้องการปรับ ทำการทำนายเป็นกลุ่มเกี่ยวกับวิธีการปรับปรุงการวัดระยะทางหรือมุมโดยใช้ประโยคนี้ และบันทึกไว้ในวารสารของคุณ:
- เราคิดว่าระยะทาง/มุมควรอยู่ที่ประมาณ ____________ มิลลิเมตร/นิ้ว/องศา
- เลือกการวัดครั้งแรกที่คุณต้องการปรับ ทำการทำนายเป็นกลุ่มเกี่ยวกับวิธีการปรับปรุงการวัดระยะทางหรือมุมโดยใช้ประโยคนี้ และบันทึกไว้ในวารสารของคุณ:
- ไดรฟ์
- ทดสอบการทำนายของคุณด้วยการขับเคลื่อนหุ่นยนต์ของคุณ บันทึกข้อสังเกตใดๆ ที่คุณทำในขณะขับรถ ซึ่งอาจช่วยให้คุณปรับปรุงความแม่นยำได้
- วัด
- วางเครื่องวัดมุมหุ่นยนต์ของคุณไว้ใต้หุ่นยนต์ หรือใช้ไม้บรรทัดวัดจุดที่หุ่นยนต์หยุดขับรถ
- รหัส
- ใช้การวัดที่คุณปรับแล้วในโครงการการเข้ารหัสของคุณ! ลองรันดูครับ การปรับแต่งที่คุณทำนั้นช่วยเพิ่มความแม่นยำและทำให้หยิบและวางถังได้ง่ายขึ้นหรือไม่ หากไม่เป็นเช่นนั้น ให้ทำซ้ำขั้นตอนและลองอีกครั้ง อย่าลืมบันทึกการวัดและการสังเกตของคุณลงในสมุดบันทึกขณะที่คุณดำเนินการ
ทรัพยากรสำหรับการปฏิบัติ:
บทความที่เชื่อมโยงที่นี่สามารถใช้ได้ในกรณีที่คุณต้องการความช่วยเหลือเพิ่มเติมในระหว่างการดำเนินกิจกรรม
ตอนนี้คุณได้ดูและอภิปรายวิดีโอแล้ว ถึงเวลาฝึกฝนแล้ว!
ขั้นตอนที่ 1: ตั้งค่าฟิลด์ของคุณตามที่แสดงในภาพด้านล่าง
ขั้นตอนที่ 2: ใช้โหมดขับเคลื่อนเพื่อสร้างแบบจำลองการเคลื่อนไหวที่หุ่นยนต์ของคุณต้องทำเพื่อทำงานให้เสร็จสมบูรณ์
- งานของคุณคือขับหุ่นยนต์ระหว่าง AprilTags เพื่อหยิบถังและวางไว้ข้างหน้า AprilTag ID 4 บันทึกการขับขี่ของคุณ จากนั้นวางแผนว่าจะเข้ารหัสการเคลื่อนไหวนั้นอย่างไร
- ใช้บัตรงานนี้ (Google / .docx / .pdf) เพื่อเป็นแนวทางในการฝึกฝนของคุณ
- เคล็ดลับสำหรับมืออาชีพ: ให้ความสนใจเป็นพิเศษกับวิธีที่หุ่นยนต์ต้องวางแนวเพื่อหยิบถังได้สำเร็จ และวางไว้ข้างหน้า AprilTag ID
ขั้นตอน 3: เขียนโค้ดให้หุ่นยนต์ทำงานให้สำเร็จ
- งานของคุณคือใช้แผนเส้นทางจากขั้นตอนที่ 2 เพื่อเขียนโค้ดให้หุ่นยนต์ขับระหว่าง AprilTags เพื่อหยิบถัง จากนั้นส่งมอบให้กับ AprilTag ID 4
- ใช้บัตรงานนี้ (Google / .docx / .pdf) เพื่อเป็นแนวทางในการฝึกฝนของคุณ
- เคล็ดลับ: พิจารณาว่าคุณจะเขียนโค้ดหุ่นยนต์ของคุณให้หมุนได้อย่างแม่นยำอย่างไรในความท้าทายนี้ โดยใช้ความรู้ก่อนหน้าจากหลักสูตร
ขั้นตอน 4: ใช้กระบวนการ Predict-Drive-Measure-Code เพื่อทำซ้ำและปรับปรุงความแม่นยำของการเคลื่อนไหวของหุ่นยนต์ในขณะที่หยิบและส่งมอบวัตถุ
- ทำนาย
- เลือกการวัดครั้งแรกที่คุณต้องการปรับ ทำการทำนายเป็นกลุ่มเกี่ยวกับวิธีการปรับปรุงการวัดระยะทางหรือมุมโดยใช้ประโยคนี้ และบันทึกไว้ในวารสารของคุณ:
- เราคิดว่าระยะทาง/มุมควรอยู่ที่ประมาณ ____________ มิลลิเมตร/นิ้ว/องศา
- เลือกการวัดครั้งแรกที่คุณต้องการปรับ ทำการทำนายเป็นกลุ่มเกี่ยวกับวิธีการปรับปรุงการวัดระยะทางหรือมุมโดยใช้ประโยคนี้ และบันทึกไว้ในวารสารของคุณ:
- ไดรฟ์
- ทดสอบการทำนายของคุณด้วยการขับเคลื่อนหุ่นยนต์ของคุณ บันทึกข้อสังเกตใดๆ ที่คุณทำในขณะขับรถ ซึ่งอาจช่วยให้คุณปรับปรุงความแม่นยำได้
- วัด
- วางเครื่องวัดมุมหุ่นยนต์ของคุณไว้ใต้หุ่นยนต์ หรือใช้ไม้บรรทัดวัดจุดที่หุ่นยนต์หยุดขับรถ
- รหัส
- ใช้การวัดที่คุณปรับแล้วในโครงการการเข้ารหัสของคุณ! ลองรันดูครับ การปรับแต่งที่คุณทำนั้นช่วยเพิ่มความแม่นยำและทำให้หยิบและวางถังได้ง่ายขึ้นหรือไม่ หากไม่เป็นเช่นนั้น ให้ทำซ้ำขั้นตอนและลองอีกครั้ง อย่าลืมบันทึกการวัดและการสังเกตของคุณลงในสมุดบันทึกขณะที่คุณดำเนินการ
ทรัพยากรสำหรับการปฏิบัติ:
บทความที่เชื่อมโยงที่นี่สามารถใช้ได้ในกรณีที่คุณต้องการความช่วยเหลือเพิ่มเติมในระหว่างการดำเนินกิจกรรม
เตือนนักเรียนถึงความคาดหวังในการทำงานกลุ่มที่กำหนดไว้ก่อนที่จะเริ่มต้น
แจกบัตรงานขั้นตอนที่ 2 หมายเลข (Google / .docx / .pdf) ให้กับนักเรียนแต่ละคน เตือนนักเรียนว่าเป้าหมายของการขับรถคือการให้แน่ใจว่าทุกคนในกลุ่มพัฒนารูปแบบทางจิตร่วมกันว่าหุ่นยนต์ควรเคลื่อนที่อย่างไรเพื่อให้ทำงานสำเร็จลุล่วง ส่งเสริมให้ผู้เรียนใส่ใจกับวิธีการบันทึกการขับขี่ของตนเอง เนื่องจากพวกเขาจะใช้การฝึกฝนเป็นเอกสารประกอบในการสร้างโค้ดของตน
ขณะที่นักเรียนกำลังขับรถ ให้เดินไปรอบห้องและสอบถามนักเรียนเกี่ยวกับการเรียนรู้ของพวกเขา ถามคำถามเช่น:
- หุ่นยนต์ของคุณต้องทำการเคลื่อนไหวที่เฉพาะเจาะจงใดบ้างเพื่อทำงานให้สำเร็จลุล่วง?
- คุณกำลังบันทึกรายละเอียดอะไรเกี่ยวกับการเคลื่อนไหวของหุ่นยนต์ของคุณอยู่บ้าง? ทำไมคุณถึงเลือกพวกนั้น? มีรายละเอียดสำคัญอื่น ๆ ที่คุณควรใส่ไว้หรือไม่?
- กลุ่มของคุณทำงานร่วมกันอย่างไรในการวางแผนเส้นทางของหุ่นยนต์? แต่ละคนมีบทบาทอย่างไร?
แจกบัตรงานขั้นตอนที่ 3 (Google / .docx / .pdf) ให้กับนักเรียนแต่ละคน หลังจากที่พวกเขาบรรลุเกณฑ์ความสำเร็จในการขับรถ และแบ่งปันเส้นทางที่วางแผนไว้กับคุณ จากนั้นนักศึกษาจะใช้แผนของตนเพื่อสร้างโครงการ VEXcode เบื้องต้น เตือนพวกเขาให้สร้างและทดสอบโครงการของพวกเขาทีละน้อย
ในขณะที่นักเรียนกำลังเขียนโค้ดหุ่นยนต์ ให้เดินไปรอบๆ ห้องและตรวจสอบกับนักเรียนเพื่อหารือเกี่ยวกับความก้าวหน้าและการเรียนรู้ของพวกเขา ถามคำถามเช่น:
- ณ จุดนี้ของโครงการของคุณ คุณได้เขียนโค้ดการเคลื่อนไหวอะไรไว้บ้าง? อะไรจะเกิดขึ้นต่อไป และคุณจะบอกได้อย่างไร?
- เหตุใดลำดับของบล็อกของคุณจึงสำคัญต่อการเคลื่อนไหวของหุ่นยนต์? กลุ่มของคุณเลือกลำดับนี้ได้อย่างไร?
- หากหุ่นยนต์เคลื่อนไหวแตกต่างไปจากที่คุณคาดไว้ คุณสามารถดำเนินการอย่างไรได้บ้าง? คุณจะแก้ไขปัญหานี้อย่างไร?
Once students have an initial coding project that completes the task, they should move on to Step 4 and begin iterating. นักเรียนควรใช้กระบวนการ Predict-Drive-Measure Code เพื่อช่วยปรับปรุงสิ่งหนึ่งสิ่งใดเกี่ยวกับการเคลื่อนไหวของหุ่นยนต์ในแต่ละครั้ง เพื่อให้ได้ความแม่นยำที่จำเป็นในการหยิบและเคลื่อนย้ายถัง เพื่ออำนวยความสะดวกให้กับกระบวนการนี้ ให้ถามคำถามเช่น:
- การคาดการณ์การวัดที่จำเป็นก่อนขับรถช่วยให้คุณปรับปรุงความแม่นยำของการเคลื่อนไหวของหุ่นยนต์ได้อย่างไร
- อธิบายว่าการปรับแต่งที่คุณทำจะช่วยปรับปรุงความสามารถของหุ่นยนต์ในการหยิบและวางถังได้อย่างไร
- การวัดของคุณได้รับการปรับปรุงหรือเปลี่ยนแปลงไปอย่างไรบ้างหลังจากพยายามหลายครั้ง และคุณได้เรียนรู้อะไรจากการทำซ้ำเหล่านี้?
- คุณตัดสินใจร่วมกันอย่างไรเกี่ยวกับส่วนต่างๆ ของโครงการที่จะเปลี่ยนแปลง? คุณตกลงกันอย่างไรว่าจะต้องเปลี่ยนแปลงอะไรบ้าง?
สรุป
ตอนนี้คุณได้ฝึกฝนแล้ว ก็ถึงเวลาที่จะแบ่งปันสิ่งที่คุณได้เรียนรู้ ตอบคำถามต่อไปนี้ในสมุดบันทึกของคุณเพื่อช่วยให้คุณสะท้อนการเรียนรู้ของคุณและเตรียมพร้อมสำหรับการอภิปรายทั้งชั้นเรียน:
- กลยุทธ์ของคุณในการหยิบและวางถังเพื่อทำภารกิจให้สำเร็จคืออะไร? ให้อธิบายให้ละเอียดถี่ถ้วน คุณคิดว่าทำไมกลยุทธ์ของคุณถึงประสบความสำเร็จ?
- คุณใช้โหมดไดรฟ์และ VEXcode เพื่อทำภารกิจให้สำเร็จได้อย่างไร กลุ่มของคุณร่วมมือกันอย่างไรในทั้งสองส่วนของการปฏิบัติ?
- คุณจะให้คำแนะนำอะไรกับคนที่กำลังเรียนรู้การเขียนโค้ดหุ่นยนต์เพื่อหยิบและวางวัตถุเป็นครั้งแรก? ทำไมคุณถึงคิดว่าคำแนะนำของคุณจะเป็นประโยชน์?
ตอนนี้คุณได้ฝึกฝนแล้ว ก็ถึงเวลาที่จะแบ่งปันสิ่งที่คุณได้เรียนรู้ ตอบคำถามต่อไปนี้ในสมุดบันทึกของคุณเพื่อช่วยให้คุณสะท้อนการเรียนรู้ของคุณและเตรียมพร้อมสำหรับการอภิปรายทั้งชั้นเรียน:
- กลยุทธ์ของคุณในการหยิบและวางถังเพื่อทำภารกิจให้สำเร็จคืออะไร? ให้อธิบายให้ละเอียดถี่ถ้วน คุณคิดว่าทำไมกลยุทธ์ของคุณถึงประสบความสำเร็จ?
- คุณใช้โหมดไดรฟ์และ VEXcode เพื่อทำภารกิจให้สำเร็จได้อย่างไร กลุ่มของคุณร่วมมือกันอย่างไรในทั้งสองส่วนของการปฏิบัติ?
- คุณจะให้คำแนะนำอะไรกับคนที่กำลังเรียนรู้การเขียนโค้ดหุ่นยนต์เพื่อหยิบและวางวัตถุเป็นครั้งแรก? ทำไมคุณถึงคิดว่าคำแนะนำของคุณจะเป็นประโยชน์?
แนะนำให้นักเรียนแบ่งปันการเรียนรู้ของตนในการอภิปรายทั้งชั้นเรียน ช่วยให้ผู้เรียนสะท้อนการเรียนรู้ของตนผ่านการปฏิบัติเพื่อบรรจบกันสู่ความเข้าใจร่วมกันหรือเป้าหมายการเรียนรู้
ใช้คำถามที่นักเรียนตอบในสมุดบันทึกของตนเป็นจุดเริ่มต้นของการอภิปราย ขณะที่คุณฟังการมีส่วนร่วมของนักเรียน ให้ถามคำถามติดตามเพื่อชี้นำความเข้าใจของพวกเขา:
- สำหรับการแบ่งปันกลยุทธ์:
กลุ่มของคุณเผชิญกับความท้าทายอะไรบ้างเมื่อหยิบและวางถัง และคุณเอาชนะมันได้อย่างไร
คุณได้พิจารณาแนวคิดกลยุทธ์อื่น ๆ อะไรอีกบ้างก่อนที่จะตัดสินใจ? ทำไมคุณถึงเลือกกลยุทธ์นั้นโดยเฉพาะ?
- สำหรับการเข้ารหัส:
- คุณสามารถอธิบายช่วงเวลาที่การขับเคลื่อนหุ่นยนต์ช่วยให้คุณตัดสินใจเขียนโค้ดได้ดีขึ้นหรือ ?
- คุณใช้บล็อคใดในการเขียนโค้ดให้หุ่นยนต์สามารถวางทิศทางบนถังและ AprilTag ได้อย่างแม่นยำ
- สำหรับการทำงานร่วมกัน:
- สมาชิกแต่ละคนในกลุ่มของคุณมีส่วนสนับสนุนในการขับเคลื่อนและการเขียนโค้ดอย่างไร
สร้างรายการคำแนะนำร่วมกันในการเขียนโค้ดหุ่นยนต์เพื่อหยิบและวางวัตถุ รายการนี้สามารถเป็นเอกสารที่มีชีวิตได้ เนื่องจากนักเรียนสามารถเพิ่มและแก้ไขได้เมื่อความเข้าใจของตนเพิ่มมากขึ้น
เลือก ถัดไป > เพื่อไปยังบทเรียนถัดไป