
Lorsque vous codez votre robot pour ramasser et placer des objets, l'orientation de votre robot est essentielle. Dans cette leçon, vous apprendrez à déplacer et à tourner votre robot avec précision pour ramasser un objet. Vous apprendrez également à utiliser le bloc Place object pour le livrer à un emplacement spécifique.
Regardez la vidéo ci-dessous pour en savoir plus sur :
- Comment l'orientation de votre robot dépend de la direction vers laquelle le kicker du robot est orienté.
- Comment coder votre robot pour ramasser et placer des objets avec précision.
Maintenant que vous avez regardé la vidéo, notez vos pensées dans votre journal. Répondez à ces questions pour guider votre réflexion et vous aider à préparer une discussion en classe entière :
- Selon vous, quelles considérations seront importantes lors du codage du robot pour ramasser et placer des objets ? Énumérez au moins deux idées.
- Selon vous, comment le robot doit-il se déplacer pour réussir à saisir un objet avec l'aimant ? Soyez précis.
- Quelles preuves avez-vous tirées de la vidéo qui soutiennent vos idées ?
Quelles sont vos questions sur le codage du robot pour ramasser et placer des objets ?
Maintenant que vous avez regardé la vidéo, notez vos pensées dans votre journal. Répondez à ces questions pour guider votre réflexion et vous aider à préparer une discussion en classe entière :
- Selon vous, quelles considérations seront importantes lors du codage du robot pour ramasser et placer des objets ? Énumérez au moins deux idées.
- Selon vous, comment le robot doit-il se déplacer pour réussir à saisir un objet avec l'aimant ? Soyez précis.
- Quelles preuves avez-vous tirées de la vidéo qui soutiennent vos idées ?
Quelles sont vos questions sur le codage du robot pour ramasser et placer des objets ?
Après que les élèves ont regardé la vidéo et avant de s'entraîner, se réunissent pour une discussion en classe entière. Utilisez les réponses des élèves aux questions fournies comme base de discussion.
Lors du codage du robot pour ramasser des objets, il est essentiel d'orienter le robot de manière à ce que le kicker soit aligné avec l'objet à ramasser. Rappelez aux élèves la position de l’aimant et la façon dont ils devront essentiellement « traverser » l’objet pour le ramasser. Guidez les élèves pour qu’ils réfléchissent à la manière dont ils devraient coder le robot pour qu’il puisse ramasser et déplacer un objet qui n’est pas directement devant le .
Pratique guidée
Maintenant que vous avez regardé et discuté de la vidéo, c'est à votre tour de pratiquer !
Étape 1 : Configurez votre champ comme indiqué dans l’image ci-dessous.
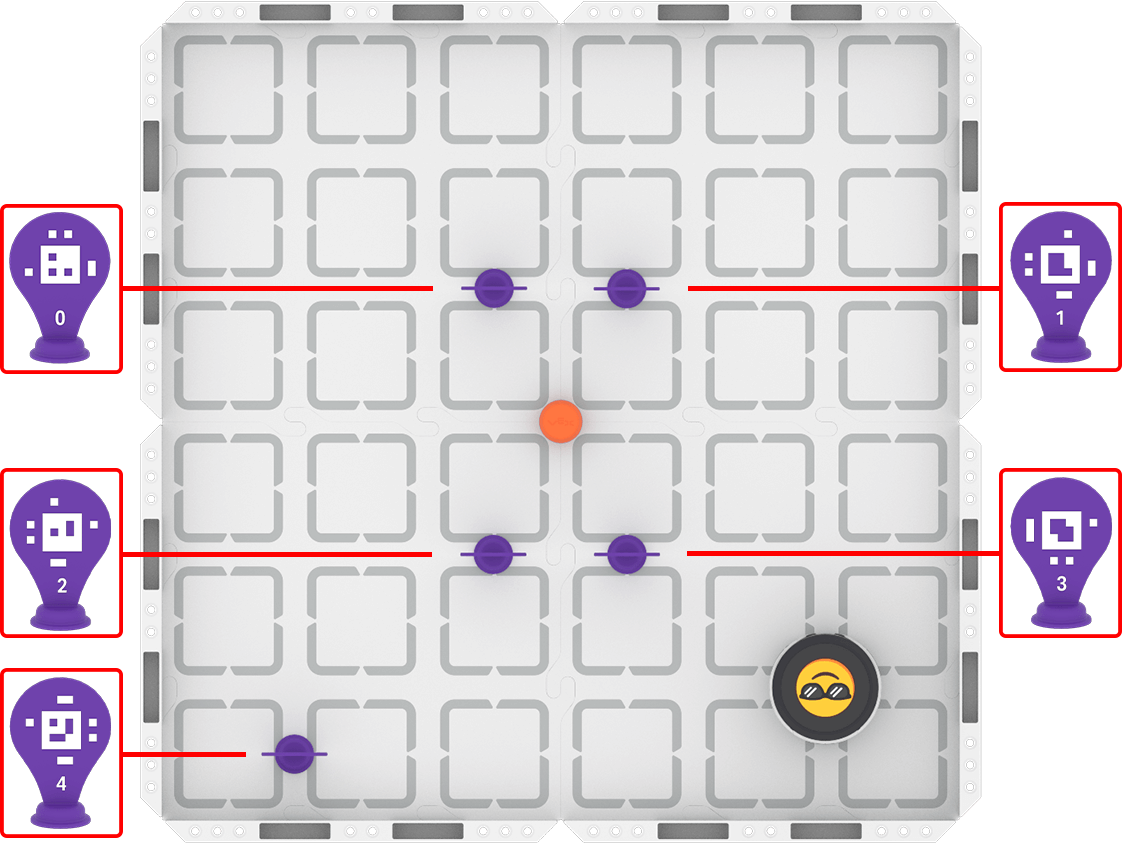
Étape 2 : Utilisez le mode Drive pour modéliser les mouvements que votre robot doit effectuer pour terminer la tâche.
- Votre tâche consiste à conduire le robot entre les AprilTags pour récupérer le baril et le placer devant l'AprilTag ID 4. Documentez votre conduite, puis planifiez comment coder ce mouvement.
- Utilisez cette fiche de tâches (Google / .docx / .pdf) pour guider votre pratique.
- Conseil de pro : faites très attention à la façon dont le robot doit être orienté pour réussir à récupérer le tonneau et à le déposer devant AprilTag ID 4.
Étape 3 : Codez le robot pour terminer la tâche.
- Votre tâche consiste à utiliser votre plan de parcours de l'étape 2 pour coder le robot afin qu'il conduise entre les AprilTags pour récupérer le baril, puis le livrer à l'AprilTag ID 4.
- Utilisez cette fiche de tâches (Google / .docx / .pdf) pour guider votre pratique.
- Conseil de pro : réfléchissez à la manière dont vous allez coder votre robot pour qu'il tourne avec précision dans ce défi, en utilisant les connaissances antérieures du cours.
Étape 4 : Utilisez le processus Prédire-Conduire-Mesurer-Coder pour itérer et améliorer la précision des mouvements du robot lorsqu'il ramasse et livre des objets.
- Prédire
- Choisissez la première mesure que vous devez ajuster. Faites une prédiction de groupe sur la façon d'améliorer la mesure de la distance ou de l'angle en utilisant cette phrase et enregistrez-la dans votre journal :
- Nous pensons que la distance/l'angle devrait être d'environ ____________ millimètres/pouces/degrés.
- Choisissez la première mesure que vous devez ajuster. Faites une prédiction de groupe sur la façon d'améliorer la mesure de la distance ou de l'angle en utilisant cette phrase et enregistrez-la dans votre journal :
- Lecteur
- Testez votre prédiction en conduisant votre robot. Documentez toutes les observations que vous faites pendant la conduite qui pourraient vous aider à améliorer votre précision.
- Mesure
- Placez votre rapporteur de robot sous le robot ou utilisez une règle pour mesurer le point auquel le robot a arrêté de rouler.
- Code
- Utilisez votre mesure ajustée dans votre projet de codage ! Exécutez-le pour tester. Le réglage que vous avez effectué améliore-t-il votre précision et facilite-t-il la prise et le placement du canon ? Sinon, répétez le processus et réessayez. Assurez-vous d’enregistrer vos mesures et observations dans votre journal au fur et à mesure.
Ressources pour la pratique :
Les articles liés ici sont disponibles si vous avez besoin d'un soutien supplémentaire pour réaliser l'activité.
Maintenant que vous avez regardé et discuté de la vidéo, c'est à votre tour de pratiquer !
Étape 1 : Configurez votre champ comme indiqué dans l’image ci-dessous.
Étape 2 : Utilisez le mode Drive pour modéliser les mouvements que votre robot doit effectuer pour terminer la tâche.
- Votre tâche consiste à conduire le robot entre les AprilTags pour récupérer le baril et le placer devant l'AprilTag ID 4. Documentez votre conduite, puis planifiez comment coder ce mouvement.
- Utilisez cette fiche de tâches (Google / .docx / .pdf) pour guider votre pratique.
- Conseil de pro : faites très attention à la façon dont le robot doit être orienté pour réussir à récupérer le tonneau et à le déposer devant AprilTag ID 4.
Étape 3 : Codez le robot pour terminer la tâche.
- Votre tâche consiste à utiliser votre plan de parcours de l'étape 2 pour coder le robot afin qu'il conduise entre les AprilTags pour récupérer le baril, puis le livrer à l'AprilTag ID 4.
- Utilisez cette fiche de tâches (Google / .docx / .pdf) pour guider votre pratique.
- Conseil de pro : réfléchissez à la manière dont vous allez coder votre robot pour qu'il tourne avec précision dans ce défi, en utilisant les connaissances antérieures du cours.
Étape 4 : Utilisez le processus Prédire-Conduire-Mesurer-Coder pour itérer et améliorer la précision des mouvements du robot lorsqu'il ramasse et livre des objets.
- Prédire
- Choisissez la première mesure que vous devez ajuster. Faites une prédiction de groupe sur la façon d'améliorer la mesure de la distance ou de l'angle en utilisant cette phrase et enregistrez-la dans votre journal :
- Nous pensons que la distance/l'angle devrait être d'environ ____________ millimètres/pouces/degrés.
- Choisissez la première mesure que vous devez ajuster. Faites une prédiction de groupe sur la façon d'améliorer la mesure de la distance ou de l'angle en utilisant cette phrase et enregistrez-la dans votre journal :
- Lecteur
- Testez votre prédiction en conduisant votre robot. Documentez toutes les observations que vous faites pendant la conduite qui pourraient vous aider à améliorer votre précision.
- Mesure
- Placez votre rapporteur de robot sous le robot ou utilisez une règle pour mesurer le point auquel le robot a arrêté de rouler.
- Code
- Utilisez votre mesure ajustée dans votre projet de codage ! Exécutez-le pour tester. Le réglage que vous avez effectué améliore-t-il votre précision et facilite-t-il la prise et le placement du canon ? Sinon, répétez le processus et réessayez. Assurez-vous d’enregistrer vos mesures et observations dans votre journal au fur et à mesure.
Ressources pour la pratique :
Les articles liés ici sont disponibles si vous avez besoin d'un soutien supplémentaire pour réaliser l'activité.
Rappelez aux élèves leurs attentes établies en matière de travail de groupe avant de commencer.
Distribuez la carte de tâche de l'étape (Google / .docx / .pdf) à chaque élève. Rappelez aux élèves que l’objectif de la conduite est de s’assurer que tous les membres du groupe développent un modèle mental partagé de la manière dont le robot doit se déplacer pour accomplir la tâche avec succès. Encouragez les élèves à être attentifs à la manière dont ils documentent leur conduite, car ils utiliseront leur pratique comme documentation pour créer leur code.
Pendant que les élèves conduisent, circulez dans la salle et vérifiez auprès des élèves leur apprentissage. Posez des questions telles que :
- Quels mouvements spécifiques votre robot doit-il effectuer pour réussir la tâche ?
- Quels détails sur les mouvements de votre robot enregistrez-vous ? Pourquoi as-tu choisi ceux-là ? Y a-t-il d’autres détails importants que vous devriez inclure ?
- Comment votre groupe travaille-t-il ensemble pour planifier le chemin du robot ? Quel rôle joue chaque personne ?
Distribuez la carte de tâche de l'étape 3 (Google / .docx / .pdf) à chaque élève après qu'il ait satisfait aux critères de réussite de la conduite et qu'il ait partagé avec vous son parcours prévu. Les étudiants utiliseront ensuite leur plan pour construire leurs projets VEXcode initiaux. Rappelez-leur de construire et de tester leurs projets de manière incrémentielle.
Pendant que les élèves codent le robot, circulez dans la salle et discutez avec eux de leurs progrès et de leur apprentissage. Posez des questions telles que :
- À ce stade de votre projet, quel mouvement avez-vous codé ? Que se passe-t-il ensuite et comment pouvez-vous le savoir ?
- Pourquoi l'ordre de vos blocs est-il important pour le mouvement du robot ? Comment votre groupe a-t-il choisi cette séquence ?
- Quelles mesures pouvez-vous prendre si le robot se déplace différemment de ce que vous attendiez ? Comment abordez-vous la résolution de ce problème ?
Une fois que les élèves ont un projet de codage initial qui complète la tâche, ils doivent passer à l'étape 4 et commencer à itérer Les étudiants doivent utiliser le processus Prédire-Conduire-Mesurer-Coder pour les aider à améliorer une chose à la fois dans le mouvement de leur robot, pour obtenir la précision nécessaire pour ramasser et déplacer le canon. Pour faciliter ce processus, posez des questions telles que :
- Comment la prédiction des mesures nécessaires avant de conduire vous aide-t-elle à améliorer la précision des mouvements de votre robot ?
- Expliquez comment les ajustements que vous effectuez améliorent la capacité du robot à saisir et à placer le baril.
- Comment vos mesures se sont-elles améliorées ou modifiées au cours de plusieurs tentatives, et qu’avez-vous appris de ces itérations ?
- Comment prenez-vous des décisions collaboratives sur les parties de votre projet à modifier ? Comment vous entendez-vous sur les changements à apporter ?
Conclure
Maintenant que vous avez pratiqué, il est temps de partager ce que vous avez appris. Répondez aux questions suivantes dans votre journal pour vous aider à réfléchir à votre apprentissage et à vous préparer à une discussion en classe entière :
- Quelle a été votre stratégie pour ramasser et placer le tonneau afin de relever le défi ? Soyez minutieux dans votre explication. Pourquoi pensez-vous que votre stratégie a réussi ?
- Comment avez-vous utilisé à la fois le mode Drive et VEXcode pour terminer la tâche ? Comment votre groupe a-t-il collaboré sur les deux parties de la pratique ?
- Quels conseils donneriez-vous à quelqu’un qui apprend à coder le robot pour ramasser et placer des objets pour la première fois ? Pourquoi pensez-vous que vos conseils seraient utiles ?
Maintenant que vous avez pratiqué, il est temps de partager ce que vous avez appris. Répondez aux questions suivantes dans votre journal pour vous aider à réfléchir à votre apprentissage et à vous préparer à une discussion en classe entière :
- Quelle a été votre stratégie pour ramasser et placer le tonneau afin de relever le défi ? Soyez minutieux dans votre explication. Pourquoi pensez-vous que votre stratégie a réussi ?
- Comment avez-vous utilisé à la fois le mode Drive et VEXcode pour terminer la tâche ? Comment votre groupe a-t-il collaboré sur les deux parties de la pratique ?
- Quels conseils donneriez-vous à quelqu’un qui apprend à coder le robot pour ramasser et placer des objets pour la première fois ? Pourquoi pensez-vous que vos conseils seraient utiles ?
Guidez les élèves pour qu'ils partagent leur apprentissage dans une discussion en classe entière. Aidez les élèves à réfléchir à leur apprentissage par la pratique pour converger vers une compréhension partagée ou des objectifs d’apprentissage.
Utilisez les questions auxquelles les élèves ont répondu dans leurs journaux comme point de départ de la discussion. Pendant que vous écoutez les contributions des élèves, posez des questions de suivi pour guider leur compréhension :
- Pour le partage de stratégie :
Quels ont été les défis auxquels votre groupe a été confronté lors de la prise et du placement du baril, et comment les avez-vous surmontés ?
Quelles autres idées stratégiques avez-vous envisagées avant de prendre votre décision ? Pourquoi avez-vous choisi cette stratégie particulière ?
- Pour le codage :
- Pouvez-vous décrire un moment où conduire le robot vous a aidé à prendre une meilleure décision de codage ?
- Quels blocs avez-vous utilisés pour coder le robot afin qu'il s'oriente précisément sur le canon et l'AprilTag ?
- Pour la collaboration :
- Comment chaque membre de votre groupe a-t-il contribué à la conduite et au codage ?
Créez une liste partagée de conseils pour coder le robot afin qu'il puisse ramasser et placer des objets. Cette liste peut être un document vivant, car les étudiants peuvent l’enrichir et la réviser à mesure que leur compréhension s’améliore.
Sélectionnez Suivant > pour passer à la leçon suivante.