
Quando si programma un robot per raccogliere e posizionare oggetti, l'orientamento del robot è fondamentale. In questa lezione imparerai a muovere e girare il tuo robot con precisione per raccogliere un oggetto. Imparerai anche come utilizzare il blocco Posiziona oggetto per consegnarlo in una posizione specifica.
Guarda il video qui sotto per saperne di più:
- L'orientamento del robot dipende dalla direzione in cui è rivolto il suo kicker.
- Come programmare il tuo robot affinché prenda e posizioni oggetti con precisione.
Ora che hai guardato il video, annota i tuoi pensieri nel tuo diario. Rispondi a queste domande per orientare il tuo pensiero e aiutarti a preparare una discussione con l'intera classe:
- Quali considerazioni ritieni saranno importanti quando si programma il robot per raccogliere e posizionare oggetti? Elenca almeno due idee.
- Secondo te, come dovrebbe muoversi il robot per riuscire a sollevare un oggetto con la calamita? Siate specifici.
- Quali prove hai tratto dal video a sostegno delle tue idee?
Quali sono alcune domande che hai riguardo alla programmazione del robot per raccogliere e posizionare oggetti?
Ora che hai guardato il video, annota i tuoi pensieri nel tuo diario. Rispondi a queste domande per orientare il tuo pensiero e aiutarti a preparare una discussione con l'intera classe:
- Quali considerazioni ritieni saranno importanti quando si programma il robot per raccogliere e posizionare oggetti? Elenca almeno due idee.
- Secondo te, come dovrebbe muoversi il robot per riuscire a sollevare un oggetto con la calamita? Siate specifici.
- Quali prove hai tratto dal video a sostegno delle tue idee?
Quali sono alcune domande che hai riguardo alla programmazione del robot per raccogliere e posizionare oggetti?
Dopo che gli studenti hanno guardato il video e prima di esercitarsi, si riuniscono per una discussione con l'intera classe. Utilizzare le risposte degli studenti alle domande fornite come base per la discussione.
Quando si programma il robot per raccogliere oggetti, è fondamentale orientare il robot in modo che il dispositivo di raccolta sia allineato con l'oggetto da raccogliere. Ricordare agli studenti la posizione del magnete e che dovranno sostanzialmente "attraversare" l'oggetto per raccoglierlo. Guidare gli studenti a considerare come dovrebbero programmare il robot per raccogliere e spostare un oggetto che non si trova direttamente di fronte al .
Pratica guidata
Ora che hai guardato e discusso il video, è il tuo turno di esercitarti!
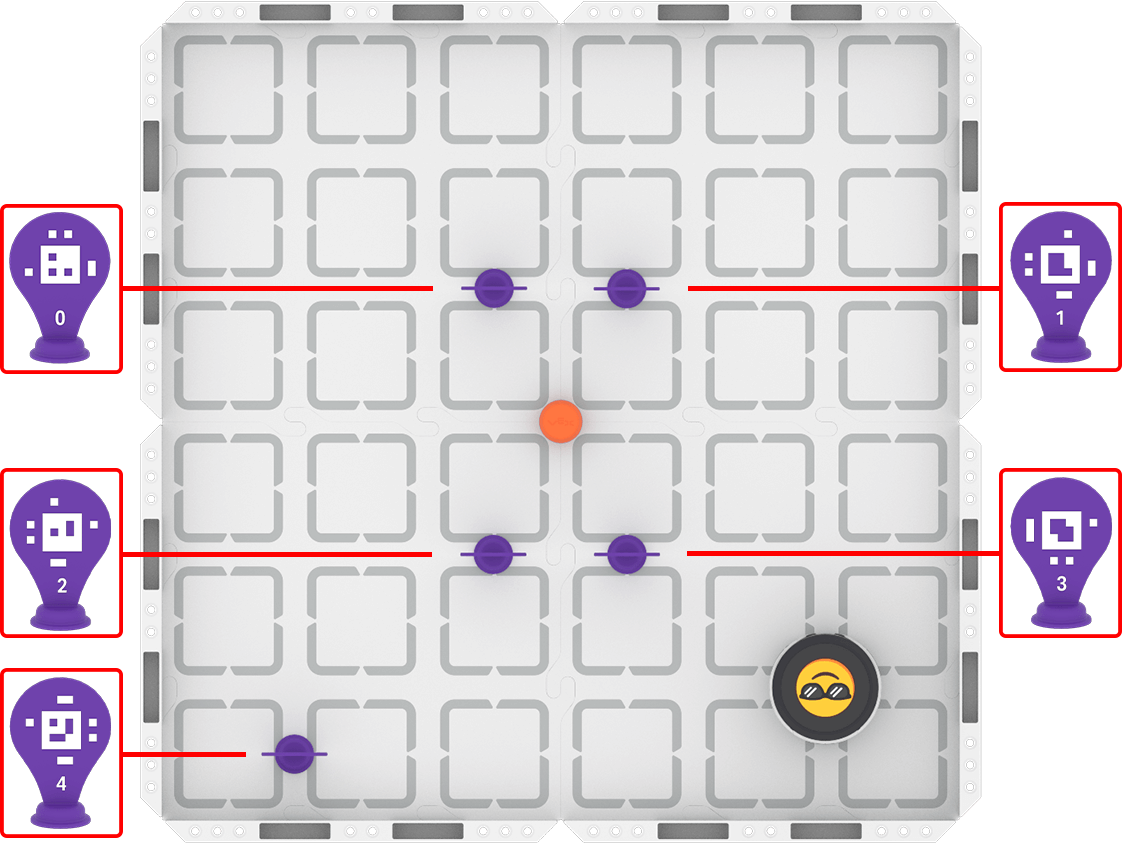
Passaggio 1: Imposta il tuo campo come mostrato nell'immagine sottostante.
Fase 2: Utilizza la modalità Guida per modellare i movimenti che il tuo robot deve compiere per completare l'attività.
- Il tuo compito è guidare il robot tra gli AprilTag per raccogliere il barile e posizionarlo di fronte all'AprilTag ID 4. Documenta la tua guida, quindi pianifica come codificare tale movimento.
- Utilizza questa scheda attività (Google / .docx / .pdf) per guidare la tua pratica.
- Suggerimento: presta molta attenzione al modo in cui il robot deve essere orientato per raccogliere correttamente il barile e lasciarlo cadere davanti all'ID AprilTag
Fase 3: Programmare il robot per completare l'attività.
- Il tuo compito è usare il percorso pianificato nel passaggio 2 per programmare il robot in modo che si sposti tra gli AprilTag per raccogliere il barile e poi consegnarlo all'AprilTag ID 4.
- Utilizza questa scheda attività (Google / .docx / .pdf) per guidare la tua pratica.
- Suggerimento: valuta attentamente come programmare il tuo robot affinché ruoti con precisione in questa sfida, utilizzando le conoscenze acquisite durante il corso.
Fase 4: Utilizzare il processo Prevedi-Guida-Misura-Codice per ripetere e migliorare la precisione dei movimenti del robot mentre raccoglie e consegna oggetti.
- Prevedere
- Seleziona la prima misurazione che desideri regolare. Fate una previsione di gruppo su come migliorare la misurazione della distanza o dell'angolo utilizzando questa struttura di frase e annotatela nel vostro diario:
- Riteniamo che la distanza/angolo dovrebbe essere di circa ____________ millimetri/pollici/gradi.
- Seleziona la prima misurazione che desideri regolare. Fate una previsione di gruppo su come migliorare la misurazione della distanza o dell'angolo utilizzando questa struttura di frase e annotatela nel vostro diario:
- Unità
- Metti alla prova la tua previsione guidando il tuo robot. Documenta tutte le osservazioni fatte durante la guida che potrebbero aiutarti a migliorare la precisione.
- Misura
- Posiziona il tuo goniometro sotto il robot o usa un righello per misurare il punto in cui il robot ha smesso di muoversi.
- Codice
- Utilizza la misurazione modificata nel tuo progetto di codifica! Eseguilo per testarlo. La regolazione che hai apportato migliora la precisione e rende più facile sollevare e posizionare la canna? In caso contrario, ripetere il procedimento e riprovare. Assicurati di annotare le tue misurazioni e osservazioni nel tuo diario man mano che procedi.
Risorse per la pratica:
Gli articoli linkati qui sono disponibili se hai bisogno di ulteriore supporto durante lo svolgimento dell'attività.
Ora che hai guardato e discusso il video, è il tuo turno di esercitarti!
Passaggio 1: Imposta il tuo campo come mostrato nell'immagine sottostante.
Fase 2: Utilizza la modalità Guida per modellare i movimenti che il tuo robot deve compiere per completare l'attività.
- Il tuo compito è guidare il robot tra gli AprilTag per raccogliere il barile e posizionarlo di fronte all'AprilTag ID 4. Documenta la tua guida, quindi pianifica come codificare tale movimento.
- Utilizza questa scheda attività (Google / .docx / .pdf) per guidare la tua pratica.
- Suggerimento: presta molta attenzione al modo in cui il robot deve essere orientato per raccogliere correttamente il barile e lasciarlo cadere davanti all'ID AprilTag
Fase 3: Programmare il robot per completare l'attività.
- Il tuo compito è usare il percorso pianificato nel passaggio 2 per programmare il robot in modo che si sposti tra gli AprilTag per raccogliere il barile e poi consegnarlo all'AprilTag ID 4.
- Utilizza questa scheda attività (Google / .docx / .pdf) per guidare la tua pratica.
- Suggerimento: valuta attentamente come programmare il tuo robot affinché ruoti con precisione in questa sfida, utilizzando le conoscenze acquisite durante il corso.
Fase 4: Utilizzare il processo Prevedi-Guida-Misura-Codice per ripetere e migliorare la precisione dei movimenti del robot mentre raccoglie e consegna oggetti.
- Prevedere
- Seleziona la prima misurazione che desideri regolare. Fate una previsione di gruppo su come migliorare la misurazione della distanza o dell'angolo utilizzando questa struttura di frase e annotatela nel vostro diario:
- Riteniamo che la distanza/angolo dovrebbe essere di circa ____________ millimetri/pollici/gradi.
- Seleziona la prima misurazione che desideri regolare. Fate una previsione di gruppo su come migliorare la misurazione della distanza o dell'angolo utilizzando questa struttura di frase e annotatela nel vostro diario:
- Unità
- Metti alla prova la tua previsione guidando il tuo robot. Documenta tutte le osservazioni fatte durante la guida che potrebbero aiutarti a migliorare la precisione.
- Misura
- Posiziona il tuo goniometro sotto il robot o usa un righello per misurare il punto in cui il robot ha smesso di muoversi.
- Codice
- Utilizza la misurazione modificata nel tuo progetto di codifica! Eseguilo per testarlo. La regolazione che hai apportato migliora la precisione e rende più facile sollevare e posizionare la canna? In caso contrario, ripetere il procedimento e riprovare. Assicurati di annotare le tue misurazioni e osservazioni nel tuo diario man mano che procedi.
Risorse per la pratica:
Gli articoli linkati qui sono disponibili se hai bisogno di ulteriore supporto durante lo svolgimento dell'attività.
Prima di iniziare, ricordare agli studenti le aspettative stabilite per il lavoro di gruppo.
Distribuisci la scheda attività del passaggio (Google / .docx / .pdf) a ogni studente. Ricordare agli studenti che l'obiettivo della guida è garantire che tutti nel gruppo sviluppino un modello mentale condiviso di come il robot dovrebbe muoversi per completare con successo il compito. Incoraggiate gli studenti a prestare attenzione al modo in cui documentano la loro guida, poiché useranno la loro pratica come documentazione per sviluppare il loro codice.
Mentre gli studenti guidano, si muovono per la stanza e verificano con gli studenti il loro apprendimento. Fai domande come:
- Quali movimenti specifici deve compiere il tuo robot per completare con successo il compito?
- Quali dettagli dei movimenti del tuo robot stai registrando? Perché hai scelto proprio loro? Ci sono altri dettagli importanti che dovresti includere?
- Come collabora il vostro gruppo per pianificare il percorso del robot? Quale ruolo svolge ciascuna persona?
Distribuisci la scheda attività del passaggio 3 (Google / .docx / .pdf) a ogni studente dopo che ha soddisfatto i criteri di successo per la guida e ha condiviso con te il percorso pianificato. Gli studenti utilizzeranno quindi il loro piano per realizzare i loro progetti VEXcode iniziali. Ricordate loro di sviluppare e testare i loro progetti in modo incrementale.
Mentre gli studenti programmano il robot, muoviti per la stanza e confrontati con loro per discutere dei loro progressi e del loro apprendimento. Fai domande come:
- A questo punto del tuo progetto, quale movimento hai codificato? Cosa succederà dopo e come puoi saperlo?
- Perché l'ordine dei blocchi è importante per il movimento del robot? Come è stata scelta questa sequenza dal vostro gruppo?
- Quali misure puoi adottare se il robot si muove in modo diverso da come ti aspettavi? Come pensi di risolvere questo problema?
Una volta che gli studenti hanno un progetto di codifica iniziale che completa l'attività, dovrebbero passare al passaggio 4 e iniziare a iterare. Gli studenti dovrebbero usare il processo Prevedi-Guida-Misura-Codifica per aiutarli a migliorare un aspetto alla volta del movimento del loro robot, per raggiungere la precisione necessaria per raccogliere e spostare il barile. Per facilitare questo processo, poni domande come:
- In che modo prevedere le misurazioni necessarie prima di guidare ti aiuta a migliorare la precisione dei movimenti del tuo robot?
- Spiega in che modo le modifiche apportate migliorano la capacità del robot di sollevare e posizionare il barile.
- Come sono migliorate o cambiate le tue misurazioni nel corso dei vari tentativi e cosa hai imparato da queste iterazioni?
- Come vengono prese decisioni collaborative su quali parti del progetto modificare? Come vi mettete d'accordo su quale cambiamento apportare?
Incartare
Ora che hai fatto pratica, è il momento di condividere ciò che hai imparato. Rispondi alle seguenti domande sul tuo diario per aiutarti a riflettere su ciò che hai imparato e prepararti per una discussione con l'intera classe:
- Qual è stata la tua strategia per raccogliere e posizionare il barile per completare la sfida? Sii esauriente nella tua spiegazione. Perché ritieni che la tua strategia abbia avuto successo?
- Come hai utilizzato sia la modalità Drive sia VEXcode per completare l'attività? Come ha collaborato il vostro gruppo in entrambe le parti della pratica?
- Quale consiglio daresti a qualcuno che sta imparando per la prima volta a programmare un robot che prenda e posizioni oggetti? Perché ritieni che il tuo consiglio possa essere utile?
Ora che hai fatto pratica, è il momento di condividere ciò che hai imparato. Rispondi alle seguenti domande sul tuo diario per aiutarti a riflettere su ciò che hai imparato e prepararti per una discussione con l'intera classe:
- Quale strategia hai utilizzato per raccogliere e posizionare il barile per completare la sfida? Sii esauriente nella tua spiegazione. Perché ritieni che la tua strategia abbia avuto successo?
- Come hai utilizzato sia la modalità Drive sia VEXcode per completare l'attività? Come ha collaborato il vostro gruppo in entrambe le parti della pratica?
- Quale consiglio daresti a qualcuno che sta imparando per la prima volta a programmare un robot che prenda e posizioni oggetti? Perché ritieni che il tuo consiglio possa essere utile?
Guidare gli studenti a condividere il loro apprendimento in una discussione con l'intera classe. Aiutare gli studenti a riflettere sul loro apprendimento attraverso la pratica per convergere verso una comprensione condivisa o obiettivi di apprendimento.
Utilizzare le domande a cui gli studenti hanno risposto nei loro diari come punto di partenza per la discussione. Mentre ascolti i contributi degli studenti, poni domande di approfondimento per guidare la loro comprensione:
- Per la condivisione della strategia:
Quali sono state le sfide che il vostro gruppo ha dovuto affrontare nel raccogliere e posizionare il barile e come le avete superate?
Quali altre idee strategiche hai preso in considerazione prima di prendere questa decisione? Perché hai scelto proprio quella strategia?
- Per la codifica:
- Puoi descrivere un momento in cui guidare il robot ti ha aiutato a prendere una decisione di programmazione migliore?
- Quali blocchi hai utilizzato per programmare il robot in modo che si orienti con precisione sulla canna e sull'AprilTag?
- Per la collaborazione:
- In che modo ogni membro del gruppo ha contribuito alla guida e alla programmazione?
Creare un elenco condiviso di consigli per programmare il robot affinché raccolga e posizioni gli oggetti. Questo elenco può essere un documento vivo, poiché gli studenti possono ampliarlo e rivederlo man mano che la loro comprensione aumenta.
Seleziona Avanti > per passare alla lezione successiva.