
Bij het programmeren van uw robot om objecten op te pakken en neer te zetten, is de oriëntatie van uw robot van cruciaal belang. In deze les leert u hoe u uw robot nauwkeurig kunt bewegen en draaien om een object op te pakken. U leert ook hoe u het blok Plaats object kunt gebruiken om een object op een specifieke locatie af te leveren.
Bekijk de onderstaande video voor meer informatie:
- De oriëntatie van uw robot hangt af van de richting waarin de schop van uw robot staat.
- Hoe je jouw robot programmeert om nauwkeurig objecten op te pakken en neer te zetten.
Nu u de video hebt bekeken, kunt u uw gedachten in uw dagboek noteren. Beantwoord de volgende vragen om uw denkproces te sturen en u voor te bereiden op een discussie met de hele klas:
- Welke overwegingen zijn volgens u belangrijk bij het programmeren van de robot om objecten op te pakken en neer te zetten? Noem minimaal twee ideeën.
- Hoe denk je dat de robot moet bewegen om succesvol een voorwerp met de magneet op te pakken? Wees specifiek.
- Welk bewijs uit de video ondersteunt jouw ideeën?
Welke vragen heeft u over het programmeren van de robot om voorwerpen op te pakken en neer te zetten?
Nu u de video hebt bekeken, kunt u uw gedachten in uw dagboek noteren. Beantwoord de volgende vragen om uw denkproces te sturen en u voor te bereiden op een discussie met de hele klas:
- Welke overwegingen zijn volgens u belangrijk bij het programmeren van de robot om objecten op te pakken en neer te zetten? Noem minimaal twee ideeën.
- Hoe denk je dat de robot moet bewegen om succesvol een voorwerp met de magneet op te pakken? Wees specifiek.
- Welk bewijs uit de video ondersteunt jouw ideeën?
Welke vragen heeft u over het programmeren van de robot om voorwerpen op te pakken en neer te zetten?
Nadat de leerlingen de video hebben bekeken en voordat ze gaan oefenen, komen bij elkaar voor een discussie met de hele klas Gebruik de antwoorden van studenten op de gestelde vragen als basis voor de discussie.
Bij het programmeren van de robot om objecten op te pakken, is het essentieel om de robot zo te oriënteren dat de schoparm in lijn is met het op te pakken object. Herinner de leerlingen eraan waar de magneet zich bevindt en hoe ze als het ware 'doorheen' het voorwerp moeten rijden om het op te pakken. Laat leerlingen nadenken over hoe ze de robot moeten programmeren om een object op te pakken en te verplaatsen dat zich niet direct voor de bevindt.
Begeleide oefening
Nu je de video hebt bekeken en besproken, is het jouw beurt om te oefenen!
Stap 1: Stel uw veld in zoals in de onderstaande afbeelding.
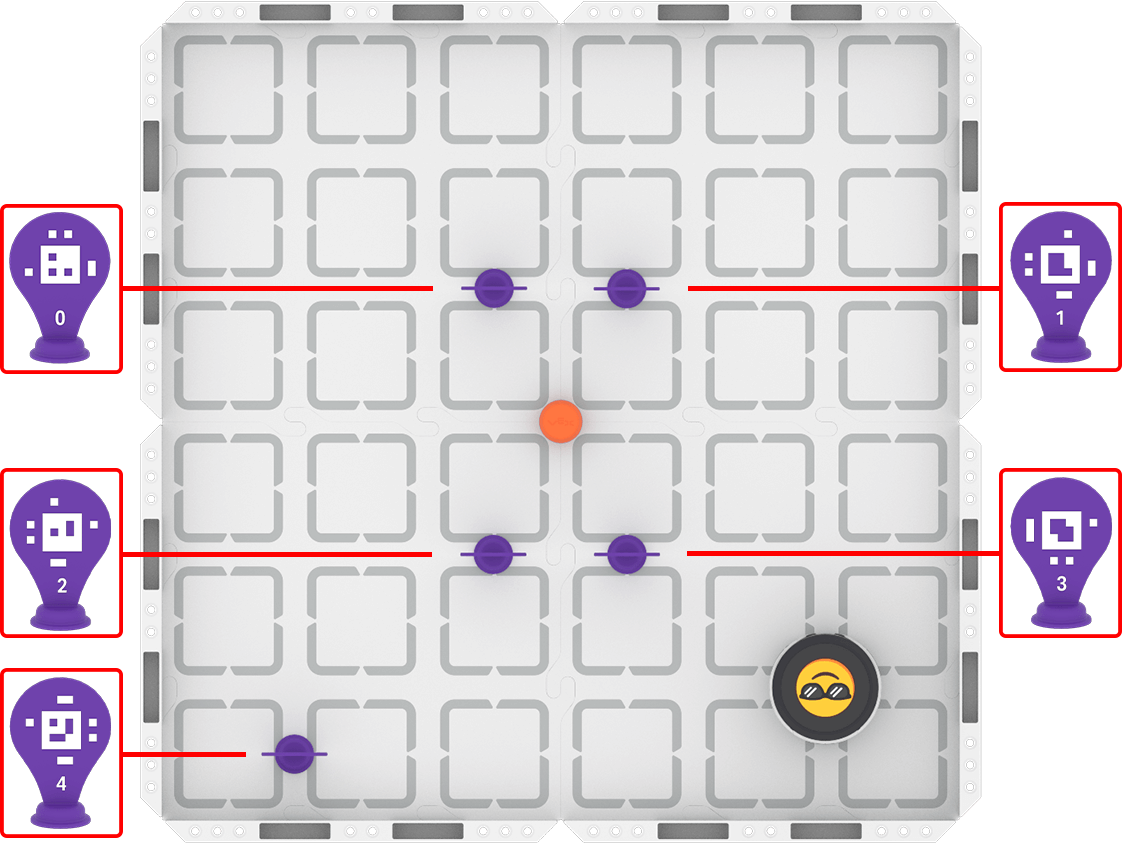
Stap 2: Gebruik de rijmodus om de bewegingen te modelleren die uw robot moet maken om de taak te voltooien.
- Jouw taak is om de robot tussen de AprilTags te rijden om het vat op te pakken en voor AprilTag ID 4 te plaatsen. Documenteer uw rijgedrag en bedenk vervolgens hoe u die beweging gaat coderen.
- Gebruik deze taakkaart (Google / .docx / .pdf) als leidraad bij uw oefening.
- Pro Tip: Let goed op hoe de robot moet worden georiënteerd om het vat succesvol op te pakken en voor AprilTag ID 4.0 neer te zetten
Stap 3: Programmeer de robot om de taak voltooien.
- Jouw taak is om het routeplan uit stap 2 te gebruiken om de robot te programmeren om tussen de AprilTags te rijden om het vat op te pakken en het vervolgens af te leveren bij AprilTag ID 4.
- Gebruik deze taakkaart (Google / .docx / .pdf) als leidraad bij uw oefening.
- Professionele tip: bedenk hoe je jouw robot gaat programmeren om nauwkeurig te kunnen draaien in deze uitdaging, gebruikmakend van de kennis die je eerder hebt opgedaan in de cursus.
Stap 4: Gebruik het proces Predict-Drive-Measure-Code om de precisie van de bewegingen van de robot te herhalen en te verbeteren terwijl deze objecten oppakt en aflevert.
- Voorspellen
- Kies de eerste meting die u wilt aanpassen. Doe met de groep een voorspelling over hoe je de afstandsmeting of de hoek kunt verbeteren met behulp van deze zinsbouw en noteer dit in je dagboek:
- Wij denken dat de afstand/hoek ongeveer ____________ millimeter/inches/graden moet zijn.
- Kies de eerste meting die u wilt aanpassen. Doe met de groep een voorspelling over hoe je de afstandsmeting of de hoek kunt verbeteren met behulp van deze zinsbouw en noteer dit in je dagboek:
- Rijd
- Test je voorspelling door met je robot te rijden. Noteer alle observaties die u tijdens het rijden doet en die u kunnen helpen uw nauwkeurigheid te verbeteren.
- Meeteenheid
- Plaats uw robotgradenboog onder de robot of gebruik een liniaal om het punt te meten waar de robot stopte met rijden.
- Code
- Gebruik uw aangepaste meting in uw coderingsproject! Voer het uit om te testen. Is door de aanpassing die u hebt gemaakt uw precisie verbeterd en wordt het oppakken en plaatsen van de loop gemakkelijker? Als dat niet lukt, herhaalt u het proces en probeert u het opnieuw. Zorg ervoor dat u uw metingen en observaties in uw dagboek noteert.
Hulpmiddelen voor de praktijk:
De artikelen die hier zijn gelinkt, zijn beschikbaar als u extra ondersteuning nodig hebt tijdens het voltooien van de activiteit.
Nu je de video hebt bekeken en besproken, is het jouw beurt om te oefenen!
Stap 1: Stel uw veld in zoals in de onderstaande afbeelding.
Stap 2: Gebruik de rijmodus om de bewegingen te modelleren die uw robot moet maken om de taak te voltooien.
- Jouw taak is om de robot tussen de AprilTags te rijden om het vat op te pakken en voor AprilTag ID 4 te plaatsen. Documenteer uw rijgedrag en bedenk vervolgens hoe u die beweging gaat coderen.
- Gebruik deze taakkaart (Google / .docx / .pdf) als leidraad bij uw oefening.
- Pro Tip: Let goed op hoe de robot moet worden georiënteerd om het vat succesvol op te pakken en voor AprilTag ID 4.0 neer te zetten
Stap 3: Programmeer de robot om de taak voltooien.
- Jouw taak is om het routeplan uit stap 2 te gebruiken om de robot te programmeren om tussen de AprilTags te rijden om het vat op te pakken en het vervolgens af te leveren bij AprilTag ID 4.
- Gebruik deze taakkaart (Google / .docx / .pdf) als leidraad bij uw oefening.
- Professionele tip: bedenk hoe je jouw robot gaat programmeren om nauwkeurig te kunnen draaien in deze uitdaging, gebruikmakend van de kennis die je eerder hebt opgedaan in de cursus.
Stap 4: Gebruik het proces Predict-Drive-Measure-Code om de precisie van de bewegingen van de robot te herhalen en te verbeteren terwijl deze objecten oppakt en aflevert.
- Voorspellen
- Kies de eerste meting die u wilt aanpassen. Doe met de groep een voorspelling over hoe je de afstandsmeting of de hoek kunt verbeteren met behulp van deze zinsbouw en noteer dit in je dagboek:
- Wij denken dat de afstand/hoek ongeveer ____________ millimeter/inches/graden moet zijn.
- Kies de eerste meting die u wilt aanpassen. Doe met de groep een voorspelling over hoe je de afstandsmeting of de hoek kunt verbeteren met behulp van deze zinsbouw en noteer dit in je dagboek:
- Rijd
- Test je voorspelling door met je robot te rijden. Noteer alle observaties die u tijdens het rijden doet en die u kunnen helpen uw nauwkeurigheid te verbeteren.
- Meeteenheid
- Plaats uw robotgradenboog onder de robot of gebruik een liniaal om het punt te meten waar de robot stopte met rijden.
- Code
- Gebruik uw aangepaste meting in uw coderingsproject! Voer het uit om te testen. Is door de aanpassing die u hebt gemaakt uw precisie verbeterd en wordt het oppakken en plaatsen van de loop gemakkelijker? Als dat niet lukt, herhaalt u het proces en probeert u het opnieuw. Zorg ervoor dat u uw metingen en observaties in uw dagboek noteert.
Hulpmiddelen voor de praktijk:
De artikelen die hier zijn gelinkt, zijn beschikbaar als u extra ondersteuning nodig hebt tijdens het voltooien van de activiteit.
Herinner leerlingen aan de vastgestelde verwachtingen voor groepswerk voordat ze beginnen.
Deel de stap 2 taakkaart (Google / .docx / .pdf) uit aan elke leerling. Herinner de leerlingen eraan dat het doel van autorijden is om ervoor te zorgen dat iedereen in de groep een gedeeld mentaal model ontwikkelt van hoe de robot moet bewegen om de taak succesvol uit te voeren. Moedig studenten aan om goed na te denken over hoe ze hun rijgedrag documenteren. Ze zullen hun rijvaardigheid immers gebruiken als documentatie voor het schrijven van hun code.
Terwijl de leerlingen rijden, loop rond in het lokaal en vraag je aan de leerlingen hoe ze het geleerde hebben geleerd. Stel vragen zoals:
- Welke specifieke bewegingen moet uw robot maken om de taak succesvol uit te voeren?
- Welke details over de bewegingen van uw robot registreert u? Waarom heb je juist die gekozen? Zijn er nog andere belangrijke details die u moet vermelden?
- Hoe werkt jouw groep samen om de route van de robot te plannen? Welke rol speelt elke persoon?
Geef elke leerling de taakkaart van stap 3 (Google / .docx / .pdf) nadat ze aan de succescriteria voor het autorijden hebben voldaan en hun geplande route met u hebben gedeeld. Vervolgens gebruiken de studenten hun plan om hun eerste VEXcode-projecten te bouwen. Herinner hen eraan dat ze hun projecten stapsgewijs moeten bouwen en testen.
Terwijl de leerlingen bezig zijn met het programmeren van de robot, loop je door de klas en bespreek je met hen de voortgang en leerervaringen. Stel vragen zoals:
- Welke bewegingen heeft u op dit moment in uw project gecodeerd? Wat gebeurt er daarna en hoe weet je dat?
- Waarom is de volgorde van je blokken belangrijk voor de beweging van de robot? Hoe heeft jullie groep deze volgorde gekozen?
- Welke stappen kunt u ondernemen als de robot anders beweegt dan u had verwacht? Hoe gaat u dit oplossen?
Zodra studenten een eerste codeerproject hebben dat de taak voltooit, moeten ze doorgaan naar stap 4 en beginnen met itereren. Studenten moeten het Predict-Drive-Measure-Code proces gebruiken om één ding tegelijk te verbeteren aan de beweging van hun robot, om zo de precisie te bereiken die nodig is om het vat op te pakken en te verplaatsen. Om dit proces te vergemakkelijken, kunt u vragen stellen als:
- Hoe helpt het voorspellen van benodigde metingen voordat u gaat rijden u bij het verbeteren van de nauwkeurigheid van de bewegingen van uw robot?
- Leg uit hoe de aanpassingen die u maakt ervoor zorgen dat de robot het vat beter kan oppakken en plaatsen.
- Hoe zijn uw metingen verbeterd of veranderd na meerdere pogingen, en wat hebt u geleerd van deze herhalingen?
- Hoe neemt u gezamenlijke beslissingen over welke onderdelen van uw project u moet wijzigen? Hoe komen jullie tot overeenstemming over de door te voeren verandering?
Afronding
Nu je hebt geoefend, is het tijd om te delen wat je hebt geleerd. Beantwoord de volgende vragen in je dagboek om je te helpen reflecteren op je leerproces en je voor te bereiden op een discussie met de hele klas:
- Wat was je strategie om het vat op te pakken en neer te zetten om de uitdaging te voltooien? Wees grondig in uw uitleg. Waarom denk je dat jouw strategie succesvol was?
- Hoe hebt u zowel de Drive-modus als VEXcode gebruikt om de taak te voltooien? Hoe heeft uw groep samengewerkt aan beide onderdelen van de praktijk?
- Welk advies zou je geven aan iemand die leert hoe hij een robot moet programmeren om voor het eerst voorwerpen op te pakken en neer te zetten? Waarom denk je dat jouw advies nuttig zou zijn?
Nu je hebt geoefend, is het tijd om te delen wat je hebt geleerd. Beantwoord de volgende vragen in je dagboek om je te helpen reflecteren op je leerproces en je voor te bereiden op een discussie met de hele klas:
- Wat was je strategie om het vat op te pakken en neer te zetten om de uitdaging te voltooien? Wees grondig in uw uitleg. Waarom denk je dat jouw strategie succesvol was?
- Hoe hebt u zowel de Drive-modus als VEXcode gebruikt om de taak te voltooien? Hoe heeft uw groep samengewerkt aan beide onderdelen van de praktijk?
- Welk advies zou je geven aan iemand die leert hoe hij een robot moet programmeren om voor het eerst voorwerpen op te pakken en neer te zetten? Waarom denk je dat jouw advies nuttig zou zijn?
Begeleid studenten bij het delen van hun kennis in een discussie met de hele klas. Help leerlingen om door middel van oefening te reflecteren op hun leerproces, om zo tot een gezamenlijk begrip of leerdoelen te komen.
Gebruik de vragen die de studenten in hun dagboeken hebben beantwoord als uitgangspunt voor de discussie. Terwijl u naar de bijdragen van uw leerlingen luistert, kunt u vervolgvragen stellen om hun begrip te vergroten:
- Voor het delen van strategieën:
Tegen welke uitdagingen liep jullie groep aan bij het oppakken en plaatsen van het vat? En hoe hebben jullie die overwonnen?
Welke andere strategische ideeën heeft u overwogen voordat u uw beslissing nam? Waarom heb je juist voor die strategie gekozen?
- Voor codering:
- Kunt u een moment beschrijven waarop het besturen van de robot u hielp een betere beslissing te nemen over het programmeren
- Welke blokken heb je gebruikt om de robot zo te programmeren dat hij zich precies op het vat en de AprilTag kan oriënteren?
- Voor samenwerking:
- Hoe heeft elk lid van jouw groep bijgedragen aan het rijden en programmeren?
Maak een gedeelde lijst met adviezen voor het programmeren van de robot zodat deze voorwerpen kan oppakken en neerzetten. Deze lijst kan een levend document zijn, waarin studenten aanvullingen kunnen aanbrengen en wijzigingen kunnen aanbrengen naarmate hun begrip toeneemt.
Selecteer Volgende > om naar de volgende les te gaan.