
Ao programar o seu robô para apanhar e colocar objetos, a orientação do robô é fundamental. Nesta lição, aprenderá a mover e rodar o seu robô com precisão para apanhar um objeto. Aprenderá também como utilizar o bloco Place object para o entregar num local específico.
Veja o vídeo abaixo para saber mais sobre:
- A orientação do seu robô depende da direção para a qual o pontapeador do robô está virado.
- Como programar o seu robô para apanhar e posicionar objetos com precisão.
Agora que já assistiu ao vídeo, registe os seus pensamentos no seu diário. Responda a estas questões para orientar o seu pensamento e ajudá-lo a preparar-se para uma discussão com toda a turma:
- Que considerações pensa que serão importantes na codificação do robô para pegar e colocar objetos? Enumera pelo menos duas ideias.
- Como achas que o robô precisa de se mover para apanhar um objeto com o íman com sucesso? Seja específico.
- Que provas do vídeo tem que suportem as suas ideias?
Quais são algumas perguntas que tem sobre a codificação do robô para apanhar e colocar objetos?
Agora que já assistiu ao vídeo, registe os seus pensamentos no seu diário. Responda a estas questões para orientar o seu pensamento e ajudá-lo a preparar-se para uma discussão com toda a turma:
- Que considerações pensa que serão importantes na codificação do robô para pegar e colocar objetos? Enumera pelo menos duas ideias.
- Como achas que o robô precisa de se mover para apanhar um objeto com o íman com sucesso? Seja específico.
- Que provas do vídeo tem que suportem as suas ideias?
Quais são algumas perguntas que tem sobre a codificação do robô para apanhar e colocar objetos?
Depois de os alunos visualizarem o vídeo e antes de praticarem, reúnem-se para uma discussão com toda a turma. Utilize as respostas dos alunos às questões fornecidas como base para a discussão.
Ao codificar o robô para apanhar objetos, é essencial orientar o robô de modo a que o pontapeador fique alinhado com o objeto a apanhar. Relembre os alunos sobre a posição do íman e como precisarão essencialmente de "atravessar" o objeto para o apanhar. Oriente os alunos para que considerem como necessitariam de codificar o robô para apanhar e mover um objeto que não esteja diretamente à frente do robô.
Prática Guiada
Agora que já assistiu e discutiu o vídeo, é a sua vez de praticar!
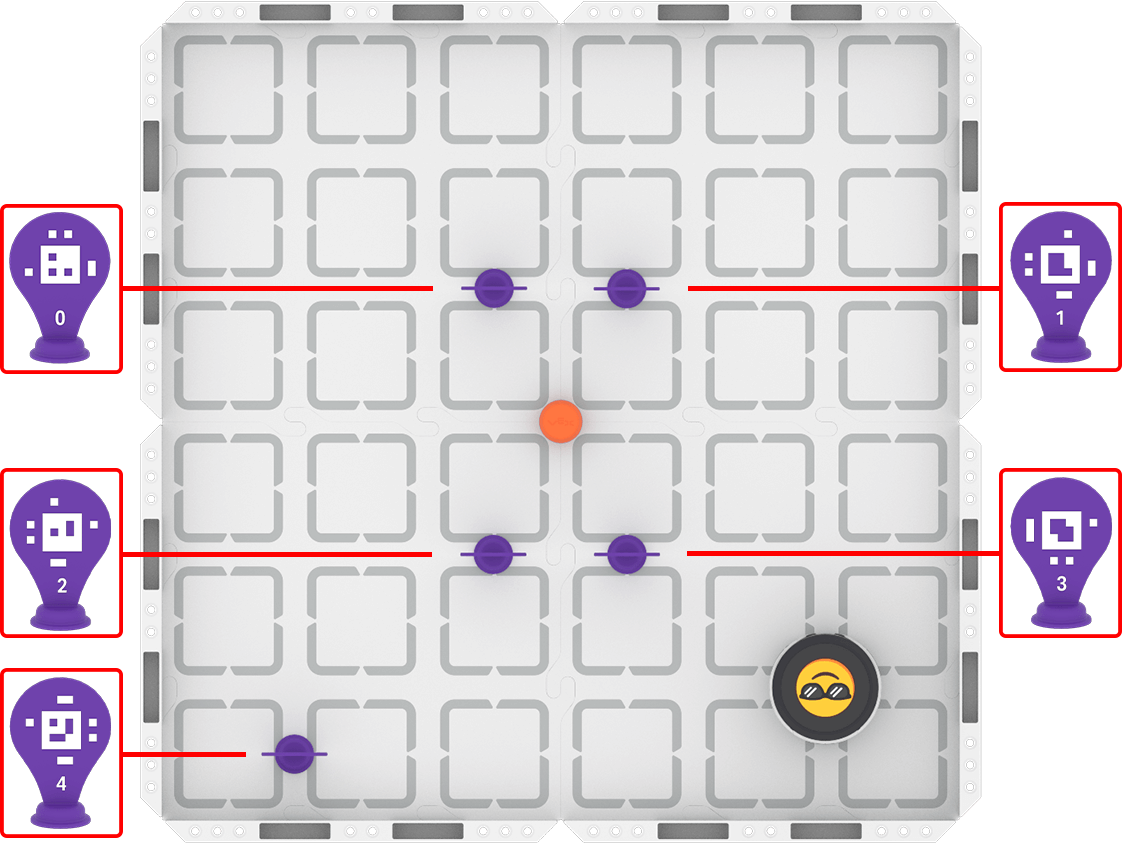
Passo 1: Configure o seu campo conforme a imagem abaixo.
Passo 2: Utilize o modo Drive para modelar os movimentos que o seu robô tem de fazer para completar a tarefa.
- A tua tarefa é conduzir o robô entre as AprilTags para apanhar o barril e colocá-lo em frente à AprilTag ID 4. Documente a sua direção e depois planeie como codificar esse movimento.
- Utilize este cartão de tarefas (Google / . docx / pdf) para orientar a sua prática.
- Dica profissional: preste muita atenção à forma como o robô deve ser orientado para apanhar o barril com sucesso e deixá-lo em frente ao AprilTag ID 4.
Passo 3: Codifique o robô para completar a tarefa.
- A tua tarefa é utilizar o plano de caminho do Passo 2 para codificar o robô para conduzir entre as AprilTags para apanhar o barril e, em seguida, entregá-lo à AprilTag ID 4.
- Utilize este cartão de tarefas (Google / . docx / pdf) para orientar a sua prática.
- Dica profissional: pense em como irá programar o seu robô para rodar com precisão neste desafio, utilizando o conhecimento prévio do curso.
Passo 4: Utilize o processo Prever-Conduzir-Medir-Codificar para iterar e melhorar a precisão dos movimentos do robô enquanto apanha e entrega objetos.
- Prever
- Escolha a primeira medida que precisa de ajustar. Faça uma previsão em grupo sobre como melhorar a medição da distância ou do ângulo utilizando esta frase e registe-a no seu diário:
- Acreditamos que a distância/ângulo deve ser de cerca de ____________ milímetros/polegadas/graus.
- Escolha a primeira medida que precisa de ajustar. Faça uma previsão em grupo sobre como melhorar a medição da distância ou do ângulo utilizando esta frase e registe-a no seu diário:
- Conduzir
- Teste a sua previsão conduzindo o seu robô. Documente quaisquer observações que faça enquanto conduz e que o possam ajudar a melhorar a sua precisão.
- Medir
- Coloque o transferidor do robô sob o robô ou utilize uma régua para medir o ponto em que o robô deixou de conduzir.
- Código
- Utilize a sua medida ajustada no seu projeto de codificação! Execute-o para testar. O ajuste que fez melhora a sua precisão e torna mais fácil pegar e posicionar o cano? Caso contrário, repita o processo e tente novamente. Não se esqueça de registar as suas medições e observações no seu diário à medida que avança.
Recursos para a prática:
Os artigos aqui vinculados estão disponíveis caso necessite de apoio adicional ao concluir a atividade.
Agora que já assistiu e discutiu o vídeo, é a sua vez de praticar!
Passo 1: Configure o seu campo conforme a imagem abaixo.
Passo 2: Utilize o modo Drive para modelar os movimentos que o seu robô tem de fazer para completar a tarefa.
- A tua tarefa é conduzir o robô entre as AprilTags para apanhar o barril e colocá-lo em frente à AprilTag ID 4. Documente a sua direção e depois planeie como codificar esse movimento.
- Utilize este cartão de tarefas (Google / . docx / pdf) para orientar a sua prática.
- Dica profissional: preste muita atenção à forma como o robô deve ser orientado para apanhar o barril com sucesso e deixá-lo em frente ao AprilTag ID 4.
Passo 3: Codifique o robô para completar a tarefa.
- A tua tarefa é utilizar o plano de caminho do Passo 2 para codificar o robô para conduzir entre as AprilTags para apanhar o barril e, em seguida, entregá-lo à AprilTag ID 4.
- Utilize este cartão de tarefas (Google / . docx / pdf) para orientar a sua prática.
- Dica profissional: pense em como irá programar o seu robô para rodar com precisão neste desafio, utilizando o conhecimento prévio do curso.
Passo 4: Utilize o processo Prever-Conduzir-Medir-Codificar para iterar e melhorar a precisão dos movimentos do robô enquanto apanha e entrega objetos.
- Prever
- Escolha a primeira medida que precisa de ajustar. Faça uma previsão em grupo sobre como melhorar a medição da distância ou do ângulo utilizando esta frase e registe-a no seu diário:
- Acreditamos que a distância/ângulo deve ser de cerca de ____________ milímetros/polegadas/graus.
- Escolha a primeira medida que precisa de ajustar. Faça uma previsão em grupo sobre como melhorar a medição da distância ou do ângulo utilizando esta frase e registe-a no seu diário:
- Conduzir
- Teste a sua previsão conduzindo o seu robô. Documente quaisquer observações que faça enquanto conduz e que o possam ajudar a melhorar a sua precisão.
- Medir
- Coloque o transferidor do robô sob o robô ou utilize uma régua para medir o ponto em que o robô deixou de conduzir.
- Código
- Utilize a sua medida ajustada no seu projeto de codificação! Execute-o para testar. O ajuste que fez melhora a sua precisão e torna mais fácil pegar e posicionar o cano? Caso contrário, repita o processo e tente novamente. Não se esqueça de registar as suas medições e observações no seu diário à medida que avança.
Recursos para a prática:
Os artigos aqui vinculados estão disponíveis caso necessite de apoio adicional ao concluir a atividade.
Relembre os alunos sobre as expectativas estabelecidas para o trabalho de grupo antes de começar.
Distribua o cartão de tarefas do Passo 2 (Google / . docx / pdf) a cada aluno. Recorde aos alunos que o objetivo da condução é garantir que todos no grupo desenvolvem um modelo mental partilhado de como o robô se deve mover para completar a tarefa com sucesso. Incentive os alunos a serem cuidadosos na forma como documentam a sua direção, pois utilizarão a sua prática como documentação para criar o seu código.
Enquanto os alunos conduzem, pela sala e verifique com os alunos sobre a aprendizagem. Faça perguntas como:
- Que movimentos específicos é que o seu robô precisa de fazer para completar a tarefa com sucesso?
- Que detalhes sobre os movimentos do seu robô está a registar? Por que razão escolheu essas opções? Há outros detalhes importantes que deve incluir?
- Como é que o vosso grupo está a trabalhar em conjunto para planear o caminho do robô? Qual é o papel de cada pessoa?
Distribua o cartão de tarefas do Passo 3 (Google / . docx / . pdf) a cada aluno depois de estes cumprirem os critérios de sucesso para conduzir e partilharem consigo o percurso planeado. Os alunos utilizarão então o seu plano para construir os seus projetos VEXcode iniciais. Lembre-os de construir e testar os seus projetos de forma incremental.
Enquanto os alunos estiverem a codificar o robô, circule pela sala e converse com eles sobre o seu progresso e aprendizagem. Faça perguntas como:
- Neste ponto do seu projeto, que movimento codificou? O que vem a seguir e como pode saber?
- Porque é que a ordem dos seus blocos é importante para o movimento do robô? Como é que o teu grupo escolheu essa sequência?
- Que medidas pode tomar se o robô se mover de forma diferente do que esperava? Como aborda a solução deste?
Assim que os alunos tiverem um projeto de codificação inicial que complete a tarefa, deverão passar para o Passo 4 e começar a iterar Os alunos devem utilizar o processo Prever-Impulsionar-Medir-Codificar para os ajudar a melhorar uma coisa sobre o movimento do robô de cada vez, para atingir a precisão necessária para pegar e mover o barril. Para facilitar este processo, coloque questões como:
- Como é que prever as medições necessárias antes de conduzir ajuda a melhorar a precisão dos movimentos do seu robô?
- Explique como os ajustes que está a fazer melhoram a capacidade do robô para pegar e posicionar o cano.
- Como é que as suas medições melhoraram ou mudaram ao longo de várias tentativas e o que aprendeu com essas iterações?
- Como está a tomar decisões colaborativas sobre que partes do seu projeto mudar? Como estão a concordar sobre qual a mudança a fazer?
Conclusão
Agora que já praticou, está na hora de partilhar o que aprendeu. Responda às seguintes questões no seu diário para o ajudar a refletir sobre a sua aprendizagem e a preparar-se para uma discussão com toda a turma:
- Qual foi a sua estratégia para apanhar e posicionar o barril para completar o desafio? Seja minucioso na sua explicação. Porque acha que a sua estratégia foi bem-sucedida?
- Como utilizou o modo Drive e o VEXcode para completar a tarefa? Como é que o seu grupo colaborou em ambas as partes da prática?
- Que conselho daria a alguém que está a aprender a programar o robô para pegar e colocar objetos pela primeira vez? Por que razão acha que o seu conselho seria útil?
Agora que já praticou, está na hora de partilhar o que aprendeu. Responda às seguintes questões no seu diário para o ajudar a refletir sobre a sua aprendizagem e a preparar-se para uma discussão com toda a turma:
- Qual foi a sua estratégia para apanhar e posicionar o barril para completar o desafio? Seja minucioso na sua explicação. Porque acha que a sua estratégia foi bem-sucedida?
- Como utilizou o modo Drive e o VEXcode para completar a tarefa? Como é que o seu grupo colaborou em ambas as partes da prática?
- Que conselho daria a alguém que está a aprender a programar o robô para pegar e colocar objetos pela primeira vez? Por que razão acha que o seu conselho seria útil?
Oriente os alunos para partilharem o que aprenderam numa discussão com toda a turma. Ajude os alunos a refletir sobre a sua aprendizagem através da prática para convergir num entendimento partilhado ou em metas de aprendizagem.
Utilize as perguntas que os alunos responderam nos seus diários como ponto de partida para a discussão. Ao ouvir os contributos dos alunos, coloque questões complementares para orientar a sua compreensão:
- Para partilha de estratégias:
Quais foram alguns dos desafios que o vosso grupo enfrentou ao pegar e colocar o barril, e como os superou?
Que outras ideias estratégicas considerou antes de tomar a sua decisão? Por que razão escolheu essa estratégia específica?
- Para codificação:
- Pode descrever um momento em que a condução do robô o ajudou a tomar uma melhor decisão de codificação?
- Que blocos utilizou para codificar o robô para orientar precisamente no barril e na AprilTag?
- Para colaboração:
- Como é que cada membro do seu grupo contribuiu para dirigir e programar?
Crie uma lista partilhada de conselhos para programar o robô para apanhar e colocar objetos. Esta lista pode ser um documento vivo, pois os alunos podem fazer acrescentos e revê-la à medida que a sua compreensão aumenta.
Selecione Seguinte > para passar para a lição seguinte.