
Cvičení pro výzvu Vision Data Challenge - Python
![]() Sada nástrojů
této aktivity
Sada nástrojů
této aktivity
V této aktivitě studenti aplikují to, co se naučili na předchozí stránce, k dokončení datové sady z ukázkového snímku. Doplní chybějící hodnoty, vypočítají hodnoty středu X a Y a interpretují, co nám data mohou říci o poloze objektu vzhledem ke středovému bodu robota. To je připraví na úspěch v následující výzvě Vision Data Challenge.
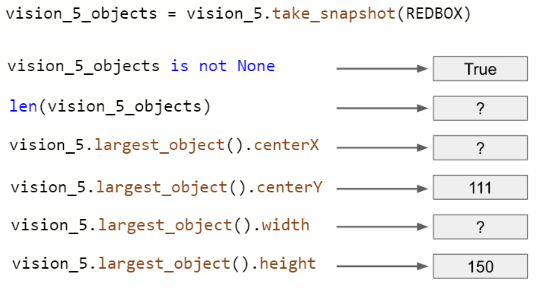
Do technického poznámkového bloku přidejte chybějící hodnoty níže.
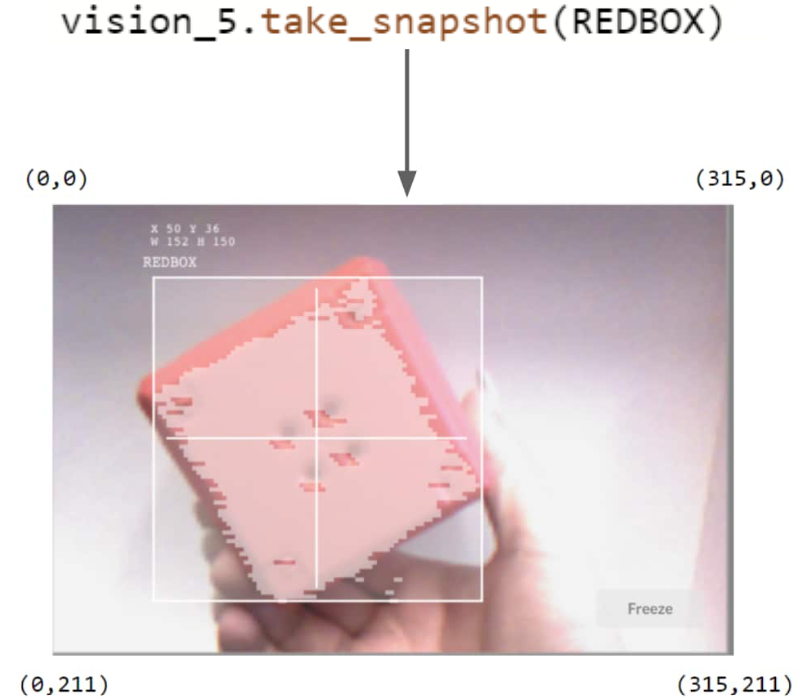
Zde jsou poskytnutá data ze snímku:
- X = 50
- Y = 36
- W = 152
- H = 150
- Je REDBOX vlevo nebo vpravo od středu robota?
- Je REDBOX vyšší nebo nižší než středový bod robota?
![]() Tipy pro učitele
Tipy pro učitele
Upozorněte studenty na skutečnost, že detekční rámec nepokrývá celý REDBOX. To je v pořádku. Stále to rozpoznávalo REDBOX. Laděním obrazového senzoru je nepravděpodobné, že by se detekční rámec zdokonalil, a to je v pořádku. Vizuální senzor rozpozná většinu REDBOXů.
![]() Sada nástrojů pro učitele
-
odpovědí
Sada nástrojů pro učitele
-
odpovědí
Odpovědi studentů lze prodiskutovat ve třídě a/nebo si můžete prohlédnout jejich technické sešity, abyste se ujistili, že aktivitu splnili.
Ve snímku je pouze jeden objekt (počet objektů = 1) a šířku poskytuje program (šířka objektu = 152). Středová hodnota X je 152/2 + 50 = 126.
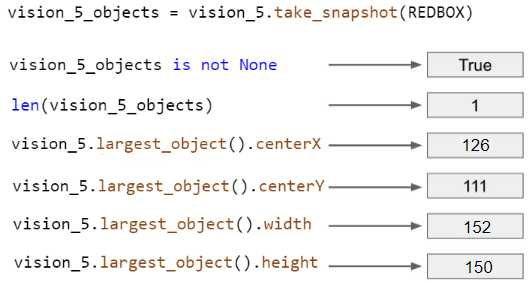
- ČERVENÁ OBALKA je nalevo od středového bodu robota (kousek vlevo od středu). ČERVENÁ OBLOHA je 31,5 pixelů (střed 157,5 - 126) vlevo od středového bodu robota.
- ČERVENÁ BOXOVÁ OBLOHA je níže než střed robota (o něco níže než střed). ČERVENÁ OBLOHA je 5,5 pixelů (111 - střed 105,5) pod středovým bodem robota.