
Thực hành cho Thử thách Dữ liệu Tầm nhìn - Python
![]() Hộp công cụ giáo viên
-
Mục đích của hoạt động này
Hộp công cụ giáo viên
-
Mục đích của hoạt động này
Hoạt động này yêu cầu học sinh áp dụng những gì đã học ở trang trước để hoàn thành một tập dữ liệu từ ảnh chụp nhanh mẫu. Họ sẽ điền vào các giá trị còn thiếu, tính toán giá trị tâm X và Y, và giải thích dữ liệu có thể cho chúng ta biết gì về vị trí của vật thể so với điểm tâm của rô-bốt. Điều này sẽ giúp họ chuẩn bị cho thành công trong Thử thách dữ liệu tầm nhìn tiếp theo.
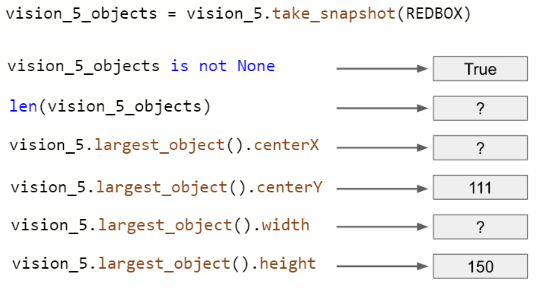
Thêm các giá trị còn thiếu bên dưới vào sổ ghi chép kỹ thuật của bạn.
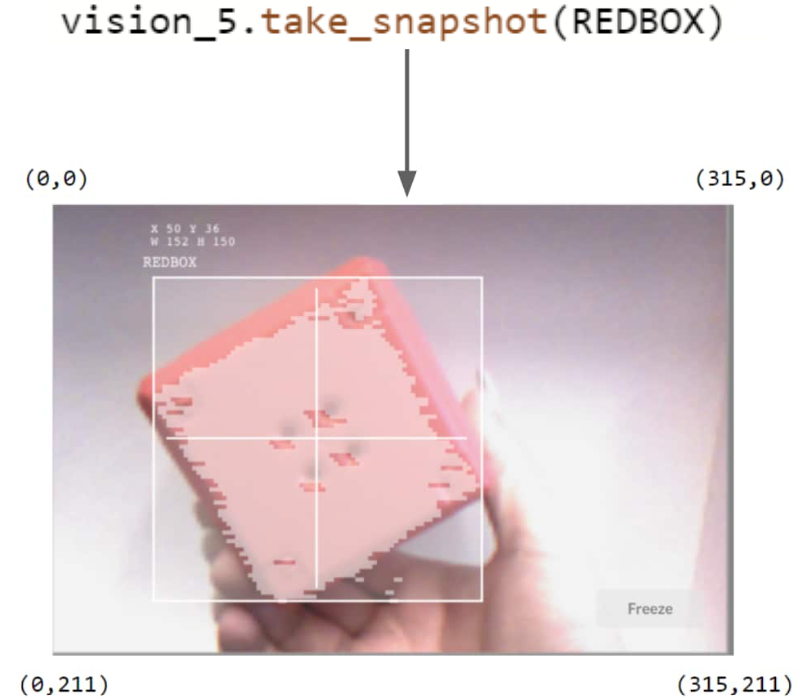
Dưới đây là dữ liệu được cung cấp từ ảnh chụp nhanh:
- X = 50
- Y = 36
- W = 152
- H = 150
- Hộp đỏ ở bên trái hay bên phải điểm trung tâm của robot?
- Hộp đỏ CAO hơn hay thấp hơn điểm trung tâm của robot?
![]() Mẹo dành cho giáo viên
Mẹo dành cho giáo viên
Lưu ý học sinh rằng khung phát hiện không bao phủ hoàn toàn REDBOX. Không sao đâu. Nó vẫn nhận ra REDBOX. Việc điều chỉnh Cảm biến thị giác không có khả năng hoàn thiện khung phát hiện và điều đó không sao cả. Cảm biến thị giác có thể nhận dạng được phần lớn REDBOX.
![]() Hộp công cụ giáo viên
-
Câu trả lời
Hộp công cụ giáo viên
-
Câu trả lời
Câu trả lời của học sinh có thể được thảo luận chung cả lớp và/hoặc bạn có thể xem lại sổ ghi chép kỹ thuật của học sinh để đảm bảo rằng các em đã hoàn thành hoạt động.
Chỉ có một đối tượng (số lượng đối tượng = 1) trong ảnh chụp nhanh và chiều rộng được cung cấp bởi chương trình (chiều rộng đối tượng = 152). Giá trị X ở trung tâm là 152/2 + 50 = 126.
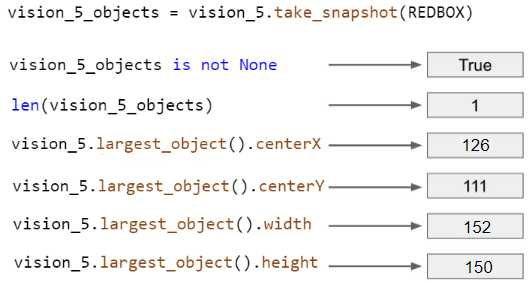
- REDBOX nằm ở bên trái điểm trung tâm của robot (hơi chếch về bên trái so với điểm trung tâm). REDBOX cách điểm trung tâm của robot 31,5 pixel (tâm 157,5 - 126) về bên trái.
- REDBOX thấp hơn điểm trung tâm của robot (thấp hơn một chút so với điểm trung tâm). REDBOX nằm cách điểm trung tâm của robot 5,5 pixel (111 - tâm 105,5).