
비전 데이터 챌린지 연습 - Python
![]() 교사 도구 상자
-
이 활동의 목적
교사 도구 상자
-
이 활동의 목적
이 활동에서는 학생들이 이전 페이지에서 배운 내용을 적용하여 예시 스냅샷에서 데이터 세트를 완성합니다. 그들은 누락된 값을 채우고, 중심 X 및 Y 값을 계산하고, 로봇의 중심점을 기준으로 한 객체의 위치에 대해 데이터가 알려줄 수 있는 내용을 해석합니다. 이를 통해 학생들은 다음에 열리는 비전 데이터 챌린지에서 성공하는 데 필요한 준비를 하게 됩니다.
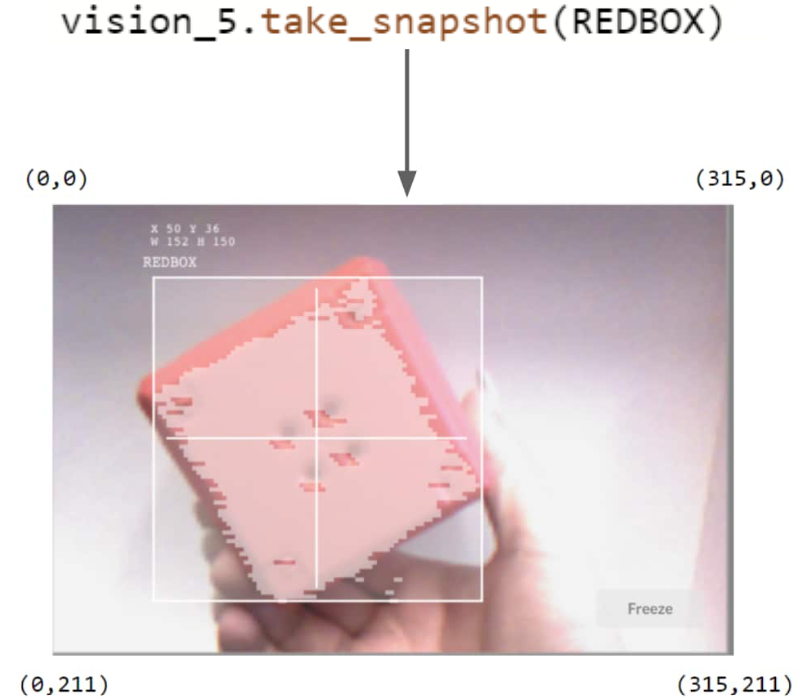
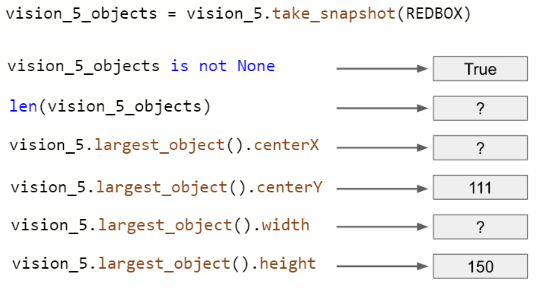
아래 누락된 값을 엔지니어링 노트에 추가하십시오.
스냅샷에서 제공된 데이터는 다음과 같습니다.
- X = 50
- Y = 36
- W = 152
- H = 150
- Redbox가 로봇의 중심점 왼쪽 또는 오른쪽에 있습니까?
- Redbox가 로봇의 중심점보다 높거나 낮습니까?
![]() 교사 팁
교사 팁
탐지 프레임이 REDBOX를 완전히 덮지 않는다는 사실을 학생들에게 알려주세요. 괜찮습니다. 그래도 REDBOX는 인식되었습니다. 비전 센서를 조정해도 감지 프레임이 완벽해질 가능성은 낮지만, 괜찮습니다. 비전 센서는 대부분의 REDBOX를 인식합니다.
![]() 교사 도구 상자
-
답변
교사 도구 상자
-
답변
학생들의 답변은 학급 전체에서 논의할 수 있으며, 공학 노트를 검토하여 활동을 완료했는지 확인할 수도 있습니다.
스냅샷에는 객체가 하나뿐(객체 수 = 1)이고 너비는 프로그램에서 제공됩니다(객체 너비 = 152). 중앙 X 값은 152/2 + 50 = 126입니다.
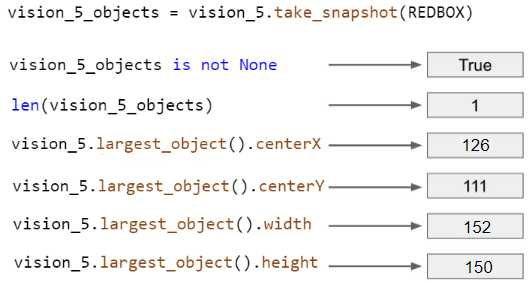
- REDBOX는 로봇 중심점의 왼쪽(중앙에서 약간 왼쪽)에 있습니다. REDBOX는 로봇 중심점에서 왼쪽으로 31.5픽셀(중앙 157.5-126) 떨어져 있습니다.
- REDBOX는 로봇의 중심점보다 낮습니다(중심보다 약간 낮음). REDBOX는 로봇의 중심점보다 5.5픽셀(111 - 중심 105.5) 아래에 있습니다.