
Prática para o Desafio Vision Data - Python
![]() Caixa de ferramentas do professor
-
O objetivo desta atividade
Caixa de ferramentas do professor
-
O objetivo desta atividade
Esta atividade faz com que os alunos apliquem o que aprenderam na página anterior para completar um conjunto de dados a partir de um exemplo instantâneo. Vão preencher os valores em falta, calcular os valores centrais X e Y e interpretar o que os dados nos podem dizer sobre a posição do objeto em relação ao ponto central do robô. Isto irá prepará-los para o sucesso no Vision Data Challenge que se segue.
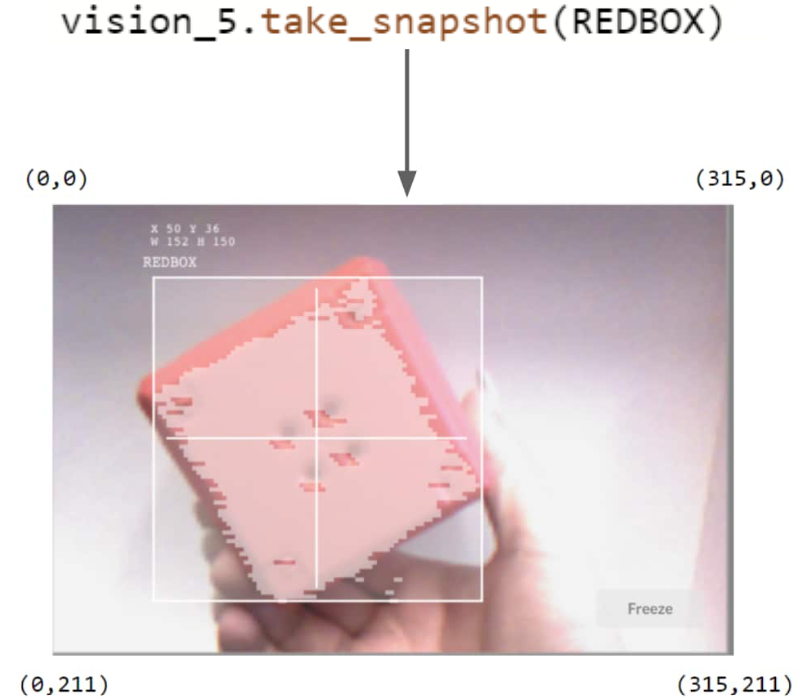
Adicione os valores em falta abaixo no seu caderno de engenharia.
Aqui estão os dados fornecidos do instantâneo:
- X = 50
- S = 36
- W = 152
- H = 150
- O REDBOX está à esquerda ou à direita do ponto central do robô?
- O REDBOX está mais alto ou mais baixo que o ponto central do robô?
![]() Dicas para professores
Dicas para professores
Chame a atenção dos alunos para o facto de o quadro de deteção não cobrir totalmente o REDBOX. Tudo bem. Ainda reconheceu o REDBOX. É improvável que o ajuste do sensor de visão aperfeiçoe o quadro de deteção e está tudo bem. O Vision Sensor reconhece a maior parte da REDBOX.
![]() Caixa de ferramentas do professor
-
respostas
Caixa de ferramentas do professor
-
respostas
As respostas dos alunos podem ser discutidas em turma e/ou pode rever os seus cadernos de engenharia para garantir que completaram a atividade.
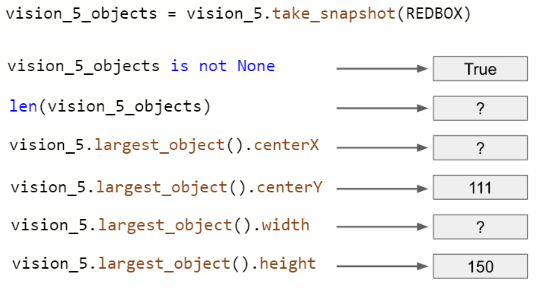
Existe apenas um objeto (contagem de objetos = 1) no instantâneo e a largura é fornecida pelo programa (largura do objeto = 152). O valor central de X é 152/2 + 50 = 126.
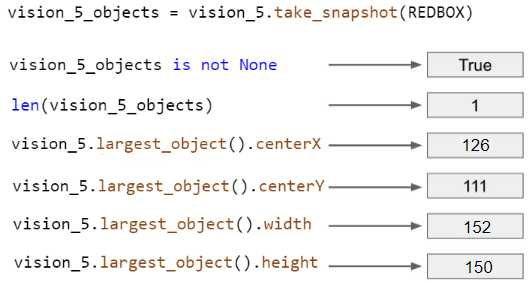
- A REDBOX está à esquerda do ponto central do robô (um pouco à esquerda do centro). O REDBOX está a 31,5 pixéis (centro 157,5 - 126) à esquerda do ponto central do robô.
- O REDBOX está abaixo do ponto central do robô (ligeiramente abaixo do centro). O REDBOX está 5,5 pixéis (111 - centro 105,5) abaixo do ponto central do robô.