

Programmierkomplexität
Roboter können für eine Vielzahl von Aufgaben konzipiert werden. Einige dieser Aufgaben sind sehr einfach, beispielsweise das Öffnen einer automatischen Tür. Andere können weitaus komplexer sein, wie etwa ein autonomes Auto, das durch eine städtische Umgebung navigiert. Egal wie komplex die Aufgabe ist, sie kann in einfachere Aufgaben unterteilt werden. Diese Aufgaben werden als Verhalten bezeichnet und sind die Bausteine der Robotikprogrammierung.
Ein Verhalten ist die Art und Weise, wie ein Roboter agiert, und kann je nach Bauart oder Programmierung des Roboters unterschiedlich komplex sein. Ein einfacher mobiler Roboter wie der VEX V5 Speedbot verfügt nur über zwei Motoren, während der Clawbot über vier Motoren verfügt, darunter zwei zusätzliche Motoren für Arm und Klaue. Zu den Verhaltensweisen beider Roboter gehört das Drehen dieser Motoren, um gesetzte Ziele zu erreichen. Mit mehr Design und Programmierung können Sie von diesem einfachen Verhalten ausgehen und komplexere Verhaltensweisen ausführen.
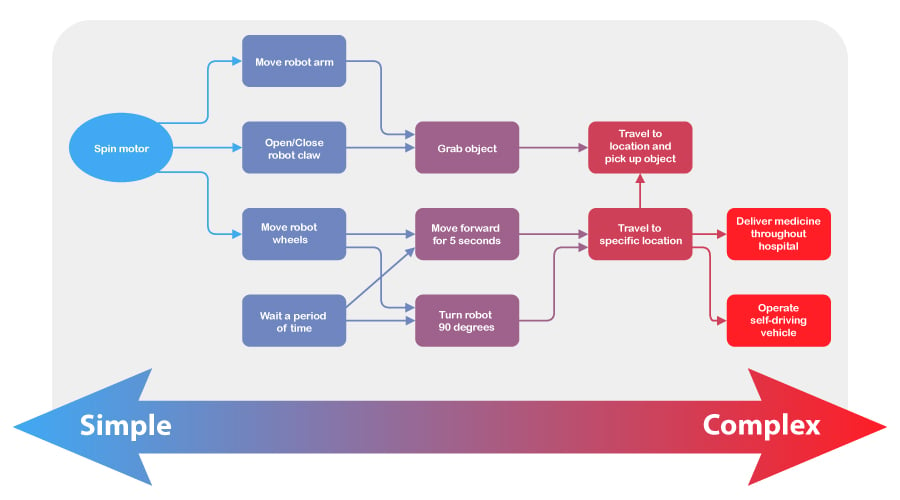
Nachfolgend finden Sie eine Liste der Roboterverhaltensweisen, die sowohl beim Speedbot als auch beim Clawbot von einfach bis komplex reichen. In Klammern sehen Sie die einfacheren Verhaltensweisen, aus denen sich die einzelnen Verhaltensweisen zusammensetzen.
-
Drehen Sie einen Motor, der einem bestimmten Port zugewiesen ist
-
Vorwärts fahren (mit dem Antriebsstrang sowohl den linken als auch den rechten Motor drehen)
-
5 Meter fahren (vorwärts fahren, dann anhalten)
-
Ergreifen Sie ein entferntes Objekt (fahren Sie 2 Meter weit und drehen Sie den Klauenmotor, um es zu ergreifen).
-
Holen Sie sich einen Gegenstand und legen Sie ihn auf ein hohes Regal (greifen Sie einen entfernten Gegenstand, drehen Sie sich um, bewegen Sie sich 2 Meter, verwenden Sie die Arm- und Klauenmotoren, um den Gegenstand anzuheben und freizugeben).
Sie können sehen, wie Sie komplexere Verhaltensweisen in einfachere Verhaltensweisen zerlegen können. Diese werden zu den Bausteinen jeder komplexen Aufgabe.
![]() Tipps für Lehrer
Tipps für Lehrer
-
Weisen Sie die Schüler an, das komplexe Roboterverhalten in kleinere, einfache Schritte zu zerlegen. Dieser Vorgang wird als Zersetzung bezeichnet.
-
Erklären Sie den Schülern, dass die Zerlegung (Aufschlüsselung) komplexer Verhaltensweisen in einfachere Aufgaben ein wichtiger Teil der Planung und Programmierung ist.
-
Erlauben Sie den Schülern, ihre autonomen Projekte durchzuführen, wenn genügend Unterrichtszeit zur Verfügung steht.
![]() Erweitern Sie Ihr Lernen
Erweitern Sie Ihr Lernen
Um diese Aktivität mit rechnerischem Denken und Zerlegen zu verbinden, bitten Sie die Schüler, die Verhaltensschritte darzustellen oder aufzulisten, die ein Roboter ausführen würde, um die folgenden Aktivitäten auszuführen:
-
Aktivität eins: Gehen Sie 1 Meter zurück und kehren Sie zum Ausgangspunkt zurück.
-
Aktivität zwei: Drehen Sie eine Kiste um, die sich 60 cm vor dem Roboter befindet.
-
Aktivität drei: Nehmen Sie einen Gegenstand auf, schütteln Sie ihn, bewegen Sie sich 30 cm weit, legen Sie den Gegenstand auf den Boden und kehren Sie zum Ausgangspunkt zurück.
![]() Diskussion motivieren
Diskussion motivieren
Die Schüler sollten die Verhaltensschritte mitteilen, die sie für die Aktivitäten aus „Erweitern Sie Ihr Lernen“ oben aufgelistet haben. Jede der folgenden Fragen kann nach einer oder allen Aktivitäten gestellt werden.
F: Welche Schritte oder Verhaltensweisen hat jede Gruppe aufgelistet? Diese Aktivität erfolgreich abschließen?
A: Die Schüler müssen die Strecke, die der Roboter zurücklegen muss, sowie die Bewegung und Geschwindigkeit des Arms berücksichtigen und außerdem die einfachen Verhaltensweisen des Roboters auflisten, die zur Erledigung der Aktivität oder Aufgabe erforderlich sind (Vorwärtsfahren, Rückwärtsfahren, Links- oder Rechtsabbiegen). ). Die Schüler sollten ihre Verhaltenslisten so erstellen, dass jeder Schritt dargestellt wird.
F: Welche Gemeinsamkeiten und Unterschiede gab es zwischen den Lösungen? (Listen der Schritte) für diese Aktivität?
A: Die Schüler werden anhand ihrer Lösungen Vergleiche anstellen. Ein Venn-Diagramm könnte eine gute Möglichkeit sein, die von den Schülern geteilten Schritte zu organisieren. Wenn die Mehrheit der Schüler einen bestimmten Schritt benennt, fügen Sie ihn in der Mitte ein, wo sich die Kreise überlappen. Wenn nur ein oder mehrere Schüler einen bestimmten Schritt benennen, fügen Sie ihn dem einen oder anderen Kreis hinzu. Wenn Sie fertig sind, sollten die Schritte in der Mitte zuverlässig einfach sein und nicht weiter aufgeschlüsselt werden können, wohingegen die Schritte, die nur in einem der Kreise aufgeführt sind, wahrscheinlich nicht so einfach sind, wie sie sein könnten. Dieses Muster könnte sich jedoch umkehren, je nachdem, wie viel Erfahrung die Klasse darin hat, komplexe Verhaltensweisen in ihre einfachsten Schritte zu zerlegen.
F: Gab es Ähnlichkeiten zu den erfolgreichen Lösungen? Wenn ja, welche waren sie?
A: Die erfolgreichsten Lösungen waren diejenigen, die die meisten Details und Spezifität enthielten. Der Roboter ist in einer Sprache mit ganz spezifischen Verhaltensweisen programmiert, die in ihre kleinsten Bestandteile zerlegt wurden. Es könnte zum Beispiel üblich sein, dass ein Roboter „einen Meter zurücklegt und zum Startpunkt zurückkehrt“, aber diese allgemeine Beschreibung lässt sich beim Programmieren nicht leicht übersetzen. Man muss es noch weiter aufschlüsseln: fährt 1 Meter vorwärts, dreht sich um 180 Grad und fährt 1 Meter vorwärts. Aber selbst das ist möglicherweise nicht präzise genug und Sie benötigen diesen Detaillierungsgrad, um programmierbar zu sein: Fahr- und Drehgeschwindigkeit auf 40 % einstellen, 1 Meter vorwärts fahren, 3 Sekunden warten, 180 Grad nach links drehen, 1 Sekunde warten , und fahren Sie 1 Meter vorwärts. Je weiter wir komplexe Verhaltensweisen aufschlüsseln, um sie zu programmierbaren Roboterverhaltensweisen zu machen, desto besser sind wir auf den Abschluss eines Projekts vorbereitet.