

Бағдарламалаудың күрделілігі
Роботтар кең ауқымды тапсырмаларды орындауға арналған. Бұл тапсырмалардың кейбірі өте қарапайым, мысалы, автоматты есікті ашу. Басқалары қалалық ортада жүретін автономды көлік сияқты әлдеқайда күрделі болуы мүмкін. Тапсырма қаншалықты күрделі болса да, оны қарапайым тапсырмаларға бөлуге болады. Бұл тапсырмалар мінез-құлық ретінде белгілі және робототехникалық бағдарламалаудың құрылыс блоктары болып табылады.
Мінез - бұл роботтың әрекет ету тәсілі және роботтың қалай құрастырылғанына немесе бағдарламаланғанына байланысты күрделілігі әртүрлі болуы мүмкін. VEX V5 Speedbot сияқты қарапайым мобильді роботта тек екі қозғалтқыш бар, ал Clawbot төрт қозғалтқышы бар, оның ішінде қол мен тырнақ үшін екі қосымша қозғалтқыш бар. Екі роботтың мінез-құлқы қойылған мақсаттарға жету үшін осы қозғалтқыштарды бұруды қамтиды. Көбірек дизайн және бағдарламалау арқылы сіз осы қарапайым әрекеттен бастай аласыз және күрделірек әрекеттерді жасай аласыз.
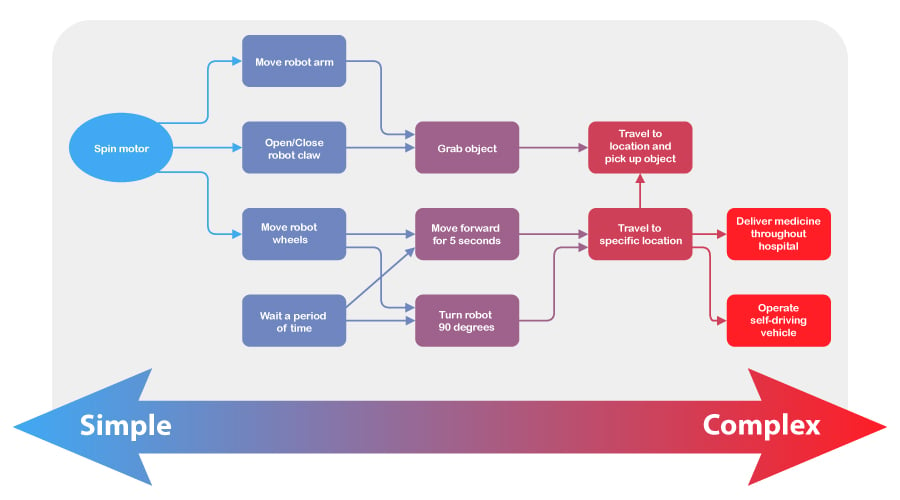
Төменде Speedbot және Clawbot үшін қарапайымнан күрделіге қарай өсетін робот әрекеттерінің тізімі берілген. Жақшада әрқайсысын құрайтын қарапайым әрекеттерді көруге болады.
-
Белгілі бір портқа тағайындалған қозғалтқышты айналдырыңыз
-
Алға жүргізіңіз (драйверді пайдаланып сол және оң қозғалтқыштарды бұраңыз)
-
5 метр жүру (алға, содан кейін тоқтаңыз)
-
Алыстағы затты ұстаңыз (2 метр жүріңіз, оны ұстау үшін тырнақ қозғалтқышын бұраңыз)
-
Нысанды алып, оны биік сөреге қойыңыз (алыстағы затты ұстаңыз, артқа бұрыңыз, 2 метр жүріңіз, затты көтеру және босату үшін қол мен тырнақ қозғалтқыштарын пайдаланыңыз)
Күрделі әрекеттердің кез келгенін қарапайым мінез-құлыққа қалай ажыратуға болатындығын көре аласыз. Бұл кез келген күрделі тапсырманың құрылыс блоктарына айналады.
![]() Мұғалімге арналған кеңестер
Мұғалімге арналған кеңестер
-
Оқушыларға күрделі робот әрекеттерін кішірек, қарапайым қадамдарға бөлуге нұсқау беріңіз. Бұл процесс ыдырау деп аталады.
-
Оқушыларға күрделі мінез-құлықтарды қарапайым тапсырмаларға бөлу (бөлу) жоспарлау мен бағдарламалаудың маңызды бөлігі екенін түсіндіріңіз.
-
Сабақ уақыты жеткілікті болса, студенттерге автономды жобаларын орындауға рұқсат беріңіз.
![]() Оқуыңызды кеңейтіңіз
Оқуыңызды кеңейтіңіз
Бұл әрекетті есептеулік ойлау және декомпозициямен байланыстыру үшін студенттерден төмендегі әрекеттерді орындау үшін робот орындайтын мінез-құлық қадамдарының картасын шығаруды немесе тізімдеуін сұраңыз:
-
Бірінші әрекет: 1 метр жүріп, бастапқы орынға оралыңыз.
-
Екінші әрекет: Роботтың алдында 60 см қашықтықта орналасқан қорапты аударыңыз.
-
Үшінші әрекет: затты алыңыз, оны шайқаңыз, 30 см жүріңіз, затты жерге қойыңыз және бастапқы нүктеге оралыңыз.
![]() Талқылауды ынталандыру
Талқылауды ынталандыру
Студенттер жоғарыдағы «Оқытуды кеңейту» бөліміндегі әрекеттер үшін тізімделген мінез-құлық қадамдарымен бөлісуі керек. Келесі сұрақтардың әрқайсысын кез келген немесе барлық әрекеттерден кейін қоюға болады.
С: Әр топ осы әрекетті сәтті аяқтау үшін қандай қадамдарды немесе әрекеттерді атап өтті?
A: Студенттер әрекетті немесе тапсырманы орындау үшін қажетті қарапайым робот әрекеттерін (алға, кері жүру, солға бұрылу) тізімдеумен қатар, робот жүруі керек ұзындығын және қолдың қозғалысы мен жылдамдығын ескеруі керек. немесе оң). Студенттер әр қадамды көрсететіндей мінез-құлық тізімдерін жасауы керек.
С: Осы әрекеттің шешімдері (қадамдар тізімі) арасында қандай ұқсастықтар мен айырмашылықтар болды?
Ж: Оқушылар өз шешімдеріне сүйене отырып, салыстырады. Венн диаграммасы студенттер бөлісетін қадамдарды ұйымдастырудың жақсы тәсілі болуы мүмкін. Егер оқушылардың көпшілігі белгілі бір қадамды атаса, оны шеңберлер қабаттасатын ортасына қосыңыз. Бір немесе бірнеше оқушы белгілі бір қадамды атаса, оны бір немесе басқа шеңберге қосыңыз. Аяқтағаннан кейін, орталықтағы қадамдар сенімді түрде қарапайым болуы керек және одан әрі бөлшектеуге болмайды, ал шеңберлердің тек біреуінде тізімделген қадамдар олар мүмкін болатындай қарапайым болмауы мүмкін. Дегенмен, бұл үлгі күрделі мінез-құлықтарды қарапайым қадамдарға бөлудегі сынып тәжірибесіне байланысты өзгертілуі мүмкін.
С: Сәтті шешімдердің ұқсастықтары болды ма? Егер солай болса, олар қандай болды?
A: Ең сәтті шешімдер ең егжей-тегжейлі және нақтылықты қамтитын шешімдер болды. Робот ең кішкентай құрамдас бөліктерге бөлінген өте нақты мінез-құлықтары бар тілде бағдарламаланған. Мысалы, роботты «1 метр жүріп өтіп, бастапқы орнына қайтып оралады» деп айту әдеттегідей болуы мүмкін, бірақ бағдарламалау кезінде бұл жоғары деңгейлі сипаттама оңай аударылмайды. Оны одан әрі бұзу керек: 1 метр алға қарай қозғалады, 180 градусқа бұрылады және 1 метрге алға қарай жүреді. Бірақ бұл жеткілікті дәл болмауы мүмкін және бағдарламалауға дайын болу үшін сізге осы егжей-тегжейлі деңгей қажет: жетекті және бұрылу жылдамдығын 40% орнатыңыз, 1 метр алға жүріңіз, 3 секунд күтіңіз, 180 градусқа солға бұрыңыз, 1 секунд күтіңіз. , және 1 метр алға қарай жүріңіз. Біз оларды бағдарламалауға дайын робот әрекеттеріне айналдыру үшін күрделі мінез-құлықтарды қаншалықты бөлшектесек, соғұрлым жобаны аяқтауға дайын боламыз.