

Complexité de la programmation
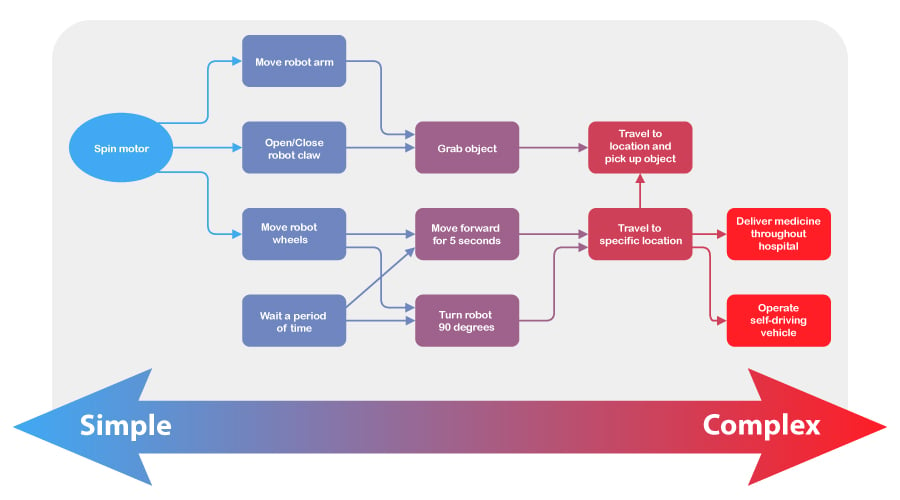
Les robots peuvent être conçus pour effectuer un large éventail de tâches. Certaines de ces tâches sont très simples, comme ouvrir une porte automatique. D’autres peuvent être bien plus complexes, comme une voiture autonome naviguant dans un environnement urbain. Quelle que soit la complexité de la tâche, elle peut être décomposée en tâches plus simples. Ces tâches sont appelées comportements et constituent les éléments constitutifs de la programmation robotique.
Un comportement est la manière dont un robot agit et sa complexité peut varier en fonction de la façon dont le robot est construit ou programmé. Un robot mobile simple comme le VEX V5 Speedbot n'a que deux moteurs, tandis que le Clawbot a quatre moteurs, dont deux moteurs supplémentaires pour le bras et la griffe. Les comportements des deux robots impliqueront de faire tourner ces moteurs pour atteindre les objectifs fixés. Avec plus de conception et de programmation, vous pouvez partir de ce comportement simple et adopter des comportements plus complexes.
Vous trouverez ci-dessous une liste de comportements de robot allant du simple au complexe pour le Speedbot et le Clawbot. Entre parenthèses, vous pouvez voir les comportements les plus simples qui composent chacun.
-
Faire tourner un moteur affecté à un certain port
-
Avancez (faites tourner les moteurs gauche et droit à l’aide de la transmission)
-
Parcourez 5 mètres (avancez, puis arrêtez-vous)
-
Saisissez un objet éloigné (parcourez 2 mètres, faites tourner le moteur à griffes pour le saisir)
-
Récupérer un objet et le poser sur une étagère en hauteur (saisir un objet éloigné, faire demi-tour, parcourir 2 mètres, utiliser les moteurs bras et griffes pour soulever et relâcher l'objet)
Vous pouvez voir comment vous pouvez déconstruire n’importe lequel des comportements les plus complexes en comportements plus simples. Ceux-ci deviennent les éléments constitutifs de toute tâche complexe.
![]() Conseils aux enseignants
Conseils aux enseignants
-
Demandez aux élèves de décomposer les comportements complexes du robot en étapes simples et plus petites. Ce processus est connu sous le nom de décomposition.
-
Expliquez aux élèves que la décomposition (décomposition) de comportements complexes en tâches plus simples est une partie importante de la planification et de la programmation.
-
Permettez aux étudiants de mener leurs projets de manière autonome s’il y a suffisamment de temps de cours.
![]() Prolongez votre apprentissage
Prolongez votre apprentissage
Pour relier cette activité à la pensée informatique et à la décomposition, demandez aux élèves de tracer ou d'énumérer les étapes comportementales qu'un robot suivrait pour réaliser les activités ci-dessous :
-
Première activité : Parcourez 1 mètre et revenez au point de départ.
-
Activité 2 : Retournez une boîte située à 60 cm devant le robot.
-
Troisième activité : Ramassez un objet, secouez-le, parcourez 30 cm, posez l'objet au sol et revenez au point de départ.
![]() Motiver les discussions
Motiver les discussions
Les élèves doivent partager les étapes comportementales qu’ils ont énumérées pour les activités de la section Étendre votre apprentissage ci-dessus. Chacune des questions suivantes peut être posée après tout ou partie des activités.
Q : Quelles étapes ou quels comportements chaque groupe a-t-il répertoriés réussi cette activité ?
A : Les élèves devront prendre en compte la longueur que le robot doit parcourir ainsi que le mouvement et la vitesse du bras, en plus d'énumérer les comportements simples du robot requis pour accomplir l'activité ou la tâche (avancer, reculer, tourner à gauche ou à droite). ). Les élèves doivent créer leurs listes de comportements de manière à ce que chaque étape soit représentée.
Q : Quelles étaient les similitudes et les différences entre les solutions (listes d'étapes) pour cette activité ?
A : Les élèves feront des comparaisons en fonction de leurs solutions. Un diagramme de Venn peut être un bon moyen d’organiser les étapes partagées par les élèves. Si la majorité des élèves nomment une étape particulière, ajoutez-la au centre là où les cercles se chevauchent. Si seulement un ou quelques élèves nomment une étape particulière, ajoutez-la à l’un ou l’autre cercle. Une fois terminées, les étapes au centre doivent être simples et ne peuvent pas être décomposées davantage, alors que les étapes répertoriées dans un seul des cercles ne sont probablement pas aussi simples qu'elles pourraient l'être. Cependant, cette tendance pourrait être inversée en fonction de l'expérience de la classe dans la décomposition de comportements complexes en étapes les plus simples.
Q : Y avait-il des similitudes avec les solutions réussies ? Si oui, quels étaient-ils ?
A : Les solutions les plus efficaces étaient celles qui incluaient le plus de détails et de spécificité. Le robot est programmé dans un langage avec des comportements très précis et décomposés dans leurs plus petits composants. Par exemple, il peut être courant de dire qu'un robot « parcourt 1 mètre et revient au point de départ », mais cette description de haut niveau ne se traduit pas facilement lors de la programmation. Vous devez le décomposer davantage : avance d'un mètre, tourne à 180 degrés et avance d'un mètre. Mais même cela n'est peut-être pas assez précis et vous avez besoin de ce niveau de détail pour être prêt à programmer : réglez les vitesses d'entraînement et de rotation à 40 %, avancez sur 1 mètre, attendez 3 secondes, tournez à gauche sur 180 degrés, attendez 1 seconde. , et avancez sur 1 mètre. Plus nous décomposons les comportements complexes pour en faire des comportements de robot prêts à être programmés, mieux nous sommes préparés à mener à bien un projet.