
행동 기반 프로그래밍
프로그래밍 복잡성
로봇은 광범위한 작업을 수행하도록 설계될 수 있습니다. 이러한 작업 중 일부는 자동문을 여는 것처럼 매우 간단합니다. 다른 것들은 도시 환경을 주행하는 자율주행차처럼 훨씬 더 복잡할 수 있습니다. 아무리 복잡한 작업이라도 더 간단한 작업으로 나눌 수 있습니다. 이러한 작업은 행동이라고 하며 로봇 프로그래밍의 기본 요소입니다.
행동은 로봇이 행동하는 방식이며, 로봇이 어떻게 제작되거나 프로그래밍되었는지에 따라 복잡도가 달라질 수 있습니다. VEX V5 Speedbot과 같은 간단한 모바일 로봇은 모터가 두 개뿐인 반면, Clawbot은 Arm과 Claw를 위한 추가 모터 두 개를 포함해 총 네 개의 모터를 가지고 있습니다. 두 로봇의 행동에는 모터를 돌려서 설정된 목표를 달성하는 것이 포함됩니다. 더 많은 디자인과 프로그래밍을 통해 이러한 간단한 동작에서 시작하여 더 복잡한 동작을 구현할 수 있습니다.
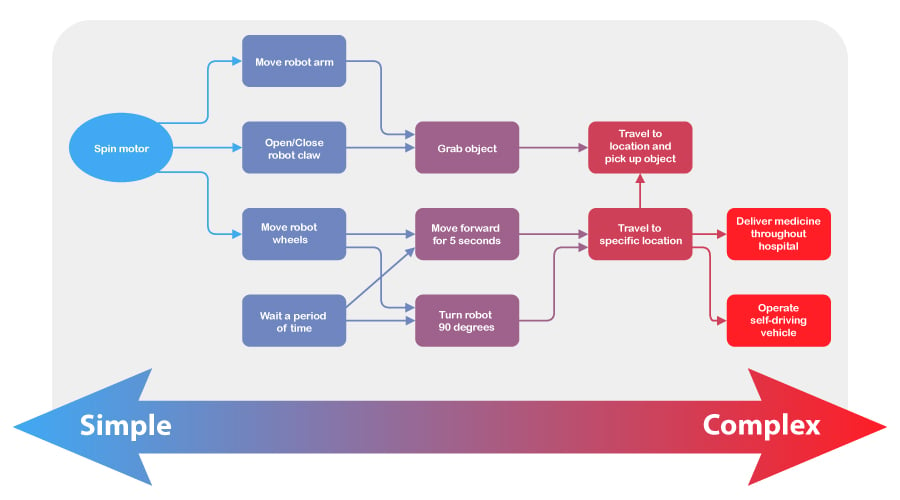
아래는 Speedbot과 Clawbot의 간단한 동작부터 복잡한 동작까지 로봇의 동작을 나열한 것입니다. 괄호 안에는 각각을 구성하는 더 간단한 동작들이 표시되어 있습니다.
- 특정 포트에 할당된 모터를 회전시킵니다.
- 전진(Drivetrain을 사용하여 좌우 모터를 모두 회전)
- 5미터 이동(앞으로 주행 후 정지)
- 멀리 있는 물체를 잡으세요(2미터 이동 후, 클로 모터를 돌려서 잡으세요)
- 물건을 가져와 높은 선반에 놓으세요(먼 곳에 있는 물건을 잡고 돌아서서 2미터를 이동한 후 팔과 집게 모터를 사용하여 물건을 들어올리고 놓으세요)
보다 복잡한 행동을 어떻게 분해하여 보다 단순한 행동으로 만들 수 있는지 살펴보겠습니다. 이것들은 복잡한 작업의 기본이 됩니다.
![]() 교사 팁
교사 팁
-
학생들에게 복잡한 로봇 동작을 더 작고 간단한 단계로 나누도록 지시합니다. 이 과정을 분해라고 합니다.
-
학생들에게 복잡한 행동을 더 간단한 작업으로 분해하는 것이 계획과 프로그래밍의 중요한 부분이라고 설명합니다.
-
수업 시간이 충분하다면 학생들이 자율적으로 프로젝트를 진행하도록 허용하세요.
![]() 학습을 확장하세요
학습을 확장하세요
이 활동을 계산적 사고와 분해에 연결하려면 학생들에게 로봇이 아래 활동을 완료하기 위해 수행할 행동 단계를 매핑하거나 나열해 보라고 요청하세요.
-
활동 1: 1미터를 이동한 후 시작 지점으로 돌아오세요.
-
활동 2: 로봇 앞 60cm 떨어진 상자를 뒤집으세요.
-
활동 3: 물건을 집어 흔들고 30cm 이동한 후, 물건을 바닥에 놓고 시작 지점으로 돌아옵니다.
![]() 토론을 촉진하다
토론을 촉진하다
학생들은 위의 학습 확장 활동에 대해 나열한 행동 단계를 공유해야 합니다. 다음 질문은 모든 활동이나 일부 활동을 마친 후에 물어볼 수 있습니다.
질문:각 그룹은 이 활동을 성공적으로 완료하기 위해 어떤 단계 또는 동작을 나열했습니까?
답변:학생들은 활동이나 과제를 완료하는 데 필요한 간단한 로봇 동작(전진, 후진, 좌회전 또는 우회전)을 나열하는 것 외에도 로봇이 이동해야 하는 거리와 팔의 움직임 및 속도를 고려해야 합니다. 학생들은 각 단계가 표현되도록 행동 목록을 작성해야 합니다.
질문:이 활동의 솔루션(단계 목록) 간의 유사점과 차이점은 무엇입니까?
답변:학생들은 자신의 솔루션을 기반으로 비교합니다. 벤 다이어그램은 학생들이 공유하는 단계를 구성하는 좋은 방법이 될 수 있습니다. 대부분의 학생이 특정 단계를 말하면, 원이 겹치는 중앙에 추가합니다. 특정 단계를 한 명 또는 소수의 학생만 언급했다면, 해당 단계를 한 서클이나 다른 서클에 추가하세요. 완료되면 중앙의 단계는 믿을 수 없을 만큼 간단해지고 더 이상 세분화될 수 없게 될 것입니다. 반면, 원 중 하나에만 나열된 단계는 가능한 한 간단하지 않을 가능성이 높습니다. 그러나 이 패턴은 복잡한 동작을 가장 간단한 단계로 분해하는 클래스의 경험에 따라 반대가 될 수도 있습니다.
질문:성공적인 솔루션과 유사점이 있었나요? 그렇다면, 그것은 무엇이었습니까?
A:가장 성공적인 솔루션은 가장 세부적이고 구체적인 내용을 포함하는 솔루션이었습니다. 로봇은 매우 구체적인 행동을 담고 있는 언어로 프로그래밍되어 있으며, 이 행동은 가장 작은 구성 요소로 분해됩니다. 예를 들어, 로봇이 "1미터를 이동한 후 시작 지점으로 돌아온다"라고 말하는 것이 일반적이지만, 프로그래밍할 때 이런 고급 설명을 쉽게 전달할 수는 없습니다. 더 자세히 설명해야 합니다. 1미터 앞으로 이동하고, 180도 회전하고, 1미터 앞으로 이동합니다. 하지만 그 정도만으로는 충분히 정확하지 않을 수 있으며 프로그래밍에 적합하려면 이 정도의 세부 정보가 필요합니다. 주행 및 회전 속도를 40%로 설정하고, 1미터 동안 전진한 후 3초간 기다린 다음, 180도 동안 좌회전하고 1초간 기다린 후 1미터 동안 전진합니다. 복잡한 행동을 더욱 세분화하여 프로그래밍에 적합한 로봇 행동으로 만들수록 프로젝트를 완료할 준비가 더 잘 갖춰집니다.