

Programozási komplexitás
A robotok sokféle feladat elvégzésére tervezhetők. Néhány ilyen feladat nagyon egyszerű, például egy automata ajtó kinyitása. Mások sokkal összetettebbek lehetnek, például egy autonóm autó, amely városi környezetben navigál. Bármilyen összetett is a feladat, egyszerűbb feladatokra bontható. Ezeket a feladatokat viselkedésnek nevezik, és a robotikai programozás építőkövei.
A viselkedés a robot cselekvési módja, és a robot felépítésének vagy programozásának függvényében változhat. Egy egyszerű mobil robotnak, mint például a VEX V5 Speedbotnak csak két motorja van, míg a Clawbotnak négy motorja van, köztük két további motor a karhoz és a karomhoz. Mindkét robot viselkedése magában foglalja a motorok forgatását a kitűzött célok elérése érdekében. Több tervezéssel és programozással ebből az egyszerű viselkedésből indulhat ki, és összetettebb viselkedéseket hajthat végre.
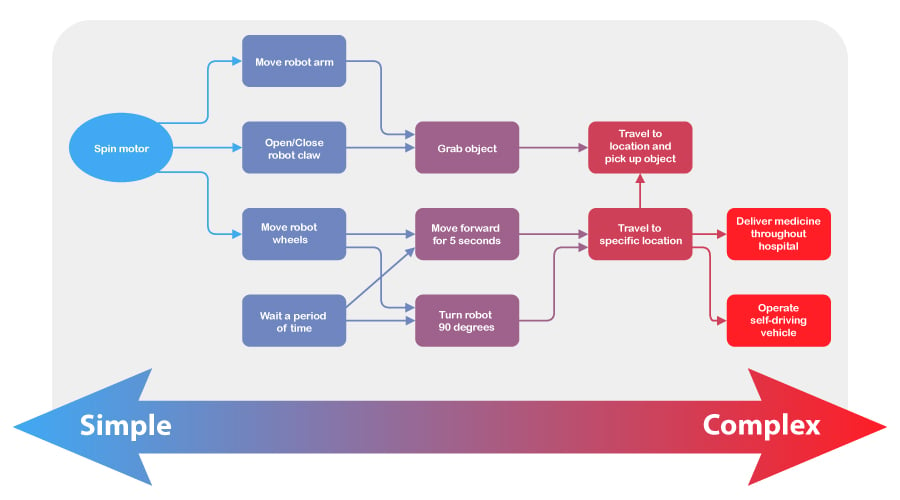
Az alábbiakban felsoroljuk a robot viselkedését, amely az egyszerűtől a bonyolultig terjed mind a Speedbot, mind a Clawbot esetében. Zárójelben láthatja az egyszerűbb viselkedési formákat, amelyek mindegyikét alkotják.
-
Egy adott porthoz rendelt motor forgatása
-
Hajtson előre (forgassa a bal és a jobb motort a hajtáslánc segítségével)
-
Haladjon 5 métert (hajsson előre, majd álljon meg)
-
Fogjon meg egy távoli tárgyat (utazzon 2 métert, forgassa el a karmos motort, hogy megragadja)
-
Vegyen elő egy tárgyat, és tegye egy magas polcra (fogjon meg egy távoli tárgyat, forduljon meg, utazzon 2 métert, használja a kar és a körmös motorokat a tárgy felemeléséhez és elengedéséhez)
Láthatja, hogyan bonthatja le a bonyolultabb viselkedéseket egyszerűbb viselkedésformákká. Ezek minden összetett feladat építőköveivé válnak.
![]() Tanári tippek
Tanári tippek
-
Utasítsa a tanulókat, hogy a bonyolult robotviselkedéseket kisebb, egyszerű lépésekre bontsák. Ezt a folyamatot bomlásnak nevezik.
-
Magyarázza el a tanulóknak, hogy a tervezés és programozás fontos része a bonyolult viselkedésformák egyszerűbb feladatokra bontása.
-
Engedje meg a tanulóknak autonóm projektjeik futtatását, ha van elegendő órai idő.
![]() Bővítse tanulását
Bővítse tanulását
Ha ezt a tevékenységet a számítógépes gondolkodással és a dekompozícióval szeretné összekapcsolni, kérje meg a tanulókat, hogy térképezzék fel vagy sorolják fel azokat a viselkedési lépéseket, amelyeket egy robot végrehajtana az alábbi tevékenységek elvégzéséhez:
-
Első tevékenység: Utazz 1 métert, és térj vissza a kiindulási helyre.
-
Második tevékenység: Fordíts meg egy dobozt, amely 60 cm-re van a robot előtt.
-
Harmadik tevékenység: Vegyen fel egy tárgyat, rázza meg, utazzon 30 cm-t, tegye le a tárgyat a földre, és térjen vissza a kiindulási pontra.
![]() Motiválja a beszélgetést
Motiválja a beszélgetést
A tanulóknak meg kell osztaniuk azokat a viselkedési lépéseket, amelyeket a fenti Tanulás kiterjesztése részben felsorolt tevékenységekhez soroltak fel. A következő kérdések mindegyike feltehető bármelyik vagy az összes tevékenység után.
K: Milyen lépéseket vagy viselkedési formákat soroltak fel az egyes csoportok a tevékenység sikeres végrehajtásához?
A: A tanulóknak figyelembe kell venniük a robot által megtett hosszt, valamint a kar mozgását és sebességét, amellett, hogy felsorolják a tevékenység vagy feladat elvégzéséhez szükséges egyszerű robotviselkedéseket (vezetés előre, hátramenetben, balra fordulás) vagy jobbra). A tanulóknak létre kell hozniuk a viselkedési listáikat úgy, hogy minden lépést ábrázoljanak.
K: Milyen hasonlóságok és különbségek mutatkoztak a feladat megoldásai (lépések listája) között?
A: A tanulók összehasonlításokat végeznek a megoldásaik alapján. A Venn-diagram jó módszer lehet a tanulók által megosztott lépések rendszerezésére. Ha a tanulók többsége megnevez egy adott lépést, adja hozzá a középponthoz, ahol a körök átfedik egymást. Ha csak egy vagy néhány tanuló nevez meg egy adott lépést, adja hozzá az egyik vagy a másik körhöz. Ha elkészült, a középen lévő lépéseknek megbízhatóan egyszerűnek kell lenniük, és nem lehet őket tovább bontani, míg a csak az egyik körben felsorolt lépések valószínűleg nem olyan egyszerűek, mint amilyenek lehetnek. Ez a minta azonban megfordulhat attól függően, hogy az osztály milyen tapasztalattal rendelkezik a bonyolult viselkedések legegyszerűbb lépésekre történő lebontásában.
K: Voltak hasonlóságok a sikeres megoldásokhoz? Ha igen, mik voltak?
A: A legsikeresebb megoldások azok voltak, amelyek a legtöbb részletet és konkrétságot tartalmazták. A robot olyan nyelven van programozva, amely nagyon specifikus viselkedést mutat, amelyeket a legkisebb összetevőkre bontottak. Például előfordulhat, hogy egy robot "1 métert utazik, és visszatér a kiindulási helyre", de ez a magas szintű leírás nem könnyen fordítható le programozáskor. Tovább kell bontani: 1 métert hajt előre, 180 fokkal elfordul, és 1 métert hajt előre. De lehet, hogy még ez sem elég precíz, és ilyen szintű részletességre van szüksége a programozáshoz: állítsa a hajtási és fordulási sebességet 40-re, haladjon előre 1 métert, várjon 3 másodpercet, forduljon balra 180 fokkal, várjon 1 másodpercet , és hajtson előre 1 métert. Minél tovább bontjuk az összetett viselkedéseket, hogy programozásra kész robotviselkedésekké tegyük őket, annál felkészültebbek vagyunk egy projekt befejezésére.