La traduction de cette page a été complétée par traduction automatique. Veuillez pardonner toute erreur éventuelle.
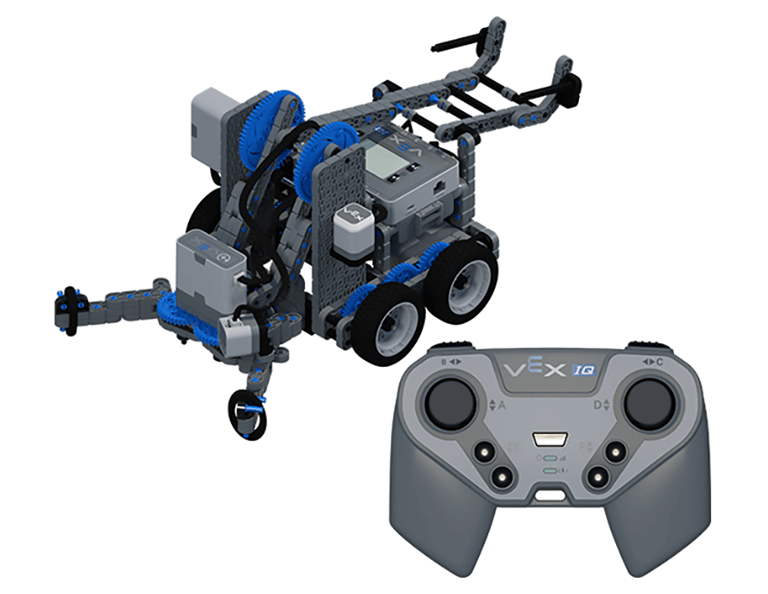
Clawbot avec contrôleur
0 Cours
Programmez le contrôleur VEX pour diriger le Clawbot IQ en utilisant le concept de boucles.

Tournant
0 Cours
Explorez les comportements du robot et créez un projet pour que le robot Autopilot tourne.
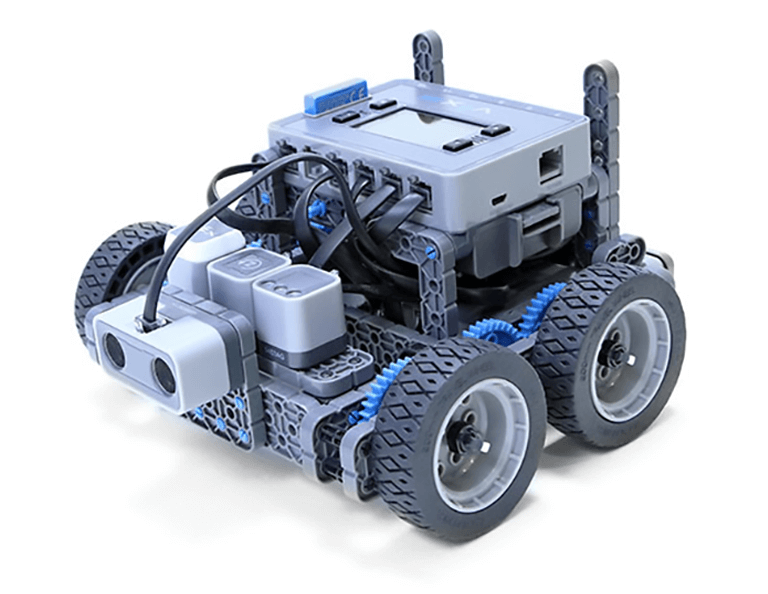
Avancer et reculer
0 Cours
Explorez les comportements du robot et créez du code pour faire avancer et reculer le robot Autopilot.
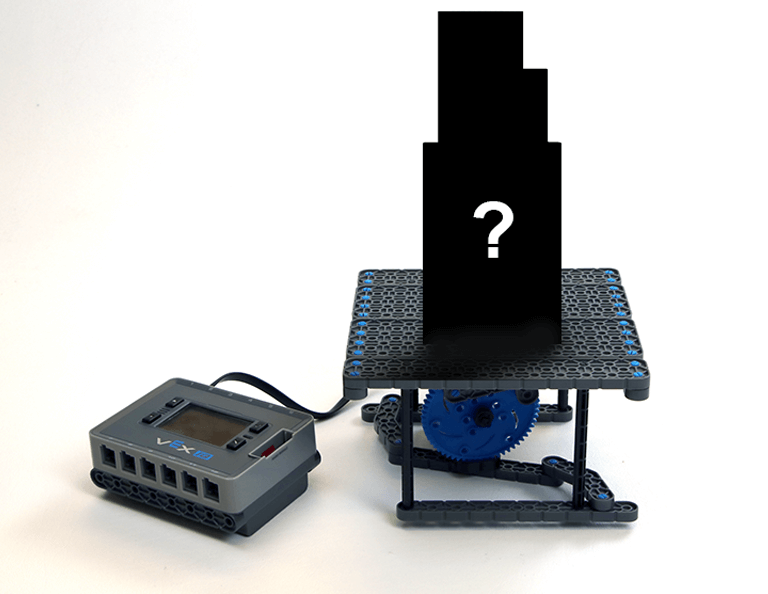
La plus haute tour
0 Cours
Construisez la tour la plus haute possible capable de résister à un tremblement de terre simulé.