
Pelajaran 3: Menggunakan Sensor dan Elektromagnet untuk Mengambil Disk
Menggunakan Sensor Mata Bawah dengan Elektromagnet
Pelajaran ini akan menggunakan umpan balik sensor yang dilaporkan untuk memecahkan tantangan yang sama seperti Pelajaran 2. Robot VR akan mengambil dan menggerakkan cakram biru pertama ke gawang biru.
- Mulai proyek baru dan pilih Disk Mover Playground saat diminta.
-
Beri nama proyek Unit8Pelajaran3.

-
Tambahkan empat komentar ke proyek. Tambahkan komentar untuk setiap langkah yang diperlukan Robot VR untuk melaju ke cakram pertama, mengambilnya, dan mengembalikannya ke sasaran biru.
def utama(): # 1. Berkendara ke disk pertama # 2. Ambil disk pertama # 3. Berkendara ke tujuan # 4. Jatuhkan cakram ke gawang -
Seret atau ketik loop while dengan kondisinot ke dalam ruang kerja di bawah komentar pertama, sehingga proyek Anda tampak seperti ini:
def utama(): #1. Berkendara ke disk pertama saat tidak dalam kondisi: tunggu(5, MSEC) # 2. Ambil disk pertama # 3. Berkendara ke tujuan # 4. Jatuhkan cakram ke gawang -
Perintah down_eye.near_objectmelaporkan True ketika Sensor Mata Bawah pada Robot VR mendeteksi cakram berwarna pada Disk Mover Playground. Cakram berada di lantai Taman Bermain dan tidak dapat dideteksi oleh Sensor Mata Depan, oleh karena itu Sensor Mata Bawah akan mendeteksi cakram. Seret atau ketik perintah down_eye.near_object sebagai kondisi loop while , sehingga bagian pertama proyek Anda tampak seperti ini:
def utama(): #1. Berkendara ke disk pertama saat tidak down_eye.near_object(): tunggu(5, MSEC) -
Perintah di dalam loop whileakan berjalan saat Robot VR TIDAK mendeteksi suatu objek. Untuk mencapai salah satu cakram, Robot VR perlu bergerak maju hingga cakram terdeteksi.

-
Seret atau ketik perintah drive di dalam loop while , sehingga bagian komentar pertama proyek tampak seperti ini:
Nomor 1. Berkendara ke disk pertama saat tidak down_eye.near_object(): drivetrain.drive(FORWARD) wait(5, MSEC) -
Saat disk terdeteksi, Robot VR perlu berhenti melaju untuk mengambilnya. Seret atau ketik perintah stop di luar loop while, sehingga bagian komentar pertama proyek tampak seperti ini:
Nomor 1. Berkendara ke disk pertama saat tidak down_eye.near_object(): drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain.stop() - Perhatikan bahwa perintah drive dan wait diindentasi di bawah header loop while, yang berarti perintah tersebut berada di dalam loop. Garis abu-abu juga dapat membantu menunjukkan perintah mana yang diberi indentasi dengan benar dan berada di dalam loop. Perintah stop sejalan dengan header loop, yang berarti perintah stop berada di luar loop. Pastikan perintah diberi indentasi dengan benar, atau proyek mungkin tidak berjalan sesuai harapan.
-
Sekarang, instruksikan Robot VR untuk mengambil disk dengan Elektromagnet dengan menyeret atau mengetik perintah energizesetelah komentar kedua, sehingga bagian kedua proyek terlihat seperti ini:
Nomor 2. Ambil disk pertama magnet.energize(BOOST) - Buka Jendela Taman Bermain jika belum terbuka. PastikanDisk Mover Playgroundterbuka, lalu jalankan proyek.
-
Robot VR melaju maju hingga cakram biru pertama terdeteksi oleh Sensor Mata Bawah, berhenti melaju, dan memberi energi pada Elektromagnet untuk mengambil cakram tersebut.

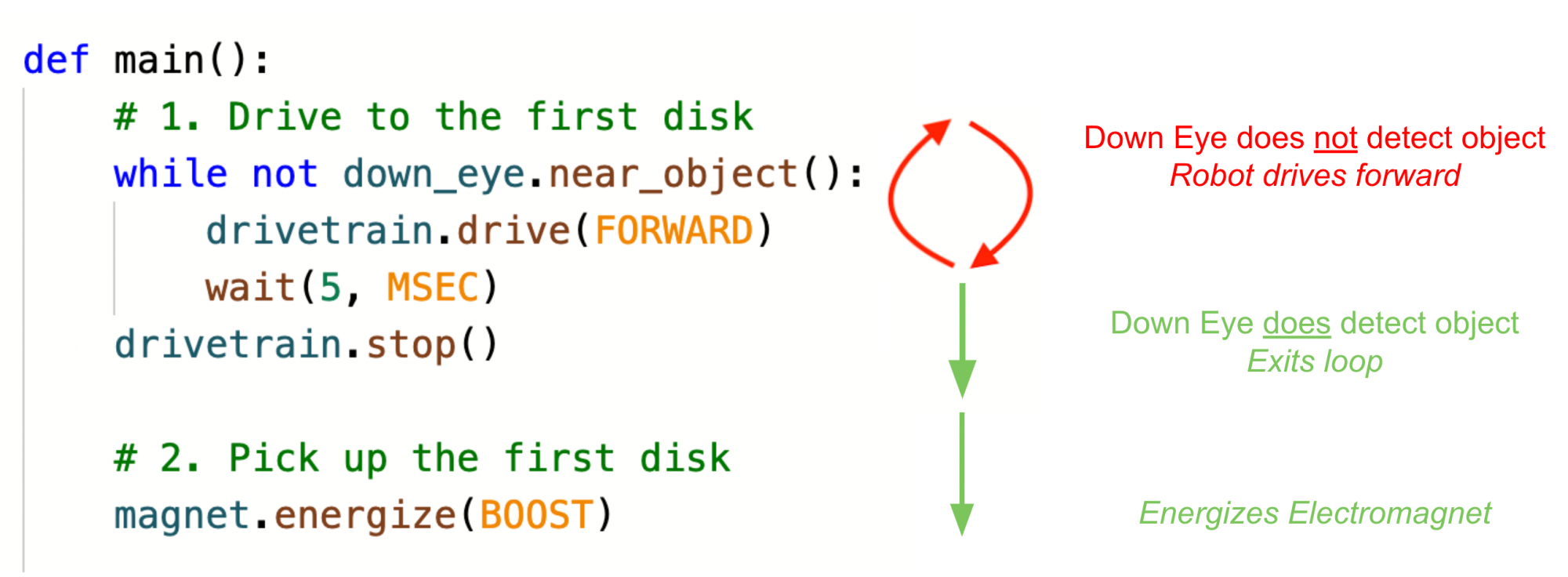
Alur Proyek untuk Mengambil Disk Pertama
Perhatikan bagaimana loop while dengan kondisi not menggunakan umpan balik sensor untuk berhasil mengambil disk pertama:
- Robot VR bergerak maju sementaraSensor Mata Bawahbukanmendeteksi suatu objek.
- Setelah Sensor Mata Bawah pada Robot VR mendeteksi suatu objek, proyek berpindah ke perintah berikutnya di luar loop sementaradan berhenti mengemudi.
- Proyek berlanjut, jadi Robot VR memberi energipada Elektromagnet untuk mengambil cakram.
Pilih tombol Berikutnya untuk melanjutkan sisa Pelajaran ini.