
പാഠം 3: ഡിസ്ക് എടുക്കാൻ സെൻസറുകളും വൈദ്യുതകാന്തികതയും ഉപയോഗിക്കുന്നു.
വൈദ്യുതകാന്തികത ഉപയോഗിച്ച് ഡൗൺ ഐ സെൻസർ ഉപയോഗിക്കുന്നു
പാഠം 2 ലെ അതേ വെല്ലുവിളി പരിഹരിക്കാൻ ഈ പാഠം റിപ്പോർട്ട് ചെയ്ത സെൻസർ ഫീഡ്ബാക്ക് ഉപയോഗിക്കും. വിആർ റോബോട്ട് ആദ്യത്തെ നീല ഡിസ്ക് എടുത്ത് നീല ഗോളിലേക്ക് നീക്കും.
- ഒരു പുതിയ പ്രോജക്റ്റ് ആരംഭിച്ച് ആവശ്യപ്പെടുമ്പോൾ ഡിസ്ക് മൂവർ പ്ലേഗ്രൗണ്ട് തിരഞ്ഞെടുക്കുക.
-
പ്രോജക്റ്റിന് എന്ന് പേര് നൽകുക യൂണിറ്റ്8ലെസൺ.

-
പ്രോജക്റ്റിലേക്ക് നാല് അഭിപ്രായങ്ങൾ ചേർക്കുക. VR റോബോട്ട് ആദ്യത്തെ ഡിസ്കിലേക്ക് ഡ്രൈവ് ചെയ്യുന്നതിനും, അത് എടുക്കുന്നതിനും, നീല ഗോളിലേക്ക് തിരികെ കൊണ്ടുവരുന്നതിനും ആവശ്യമായ ഓരോ ഘട്ടത്തിനും അഭിപ്രായങ്ങൾ ചേർക്കുക.
ഡെഫ് മെയിൻ(): # 1. ആദ്യത്തെ ഡിസ്ക് # 2 ലേക്ക് ഡ്രൈവ് ചെയ്യുക. ആദ്യത്തെ ഡിസ്ക് # 3 എടുക്കുക. # 4 എന്ന ലക്ഷ്യത്തിലേക്ക് ഡ്രൈവ് ചെയ്യുക. ലക്ഷ്യത്തിൽ ഡിസ്ക് ഇടുക -
ആദ്യ കമന്റിന് താഴെയുള്ള വർക്ക്സ്പെയ്സിലേക്ക്അല്ല കണ്ടീഷനുള്ള while ലൂപ്പ് വലിച്ചിടുക അല്ലെങ്കിൽ ടൈപ്പ് ചെയ്യുക, അങ്ങനെ നിങ്ങളുടെ പ്രോജക്റ്റ് ഇതുപോലെ കാണപ്പെടും:
ഡെഫ് മെയിൻ(): #1. ആദ്യത്തെ ഡിസ്ക് ലേക്ക് ഡ്രൈവ് ചെയ്യുക, കണ്ടീഷൻ: wait(5, MSEC) # 2. ആദ്യത്തെ ഡിസ്ക് # 3 എടുക്കുക. # 4 എന്ന ലക്ഷ്യത്തിലേക്ക് ഡ്രൈവ് ചെയ്യുക. ലക്ഷ്യത്തിൽ ഡിസ്ക് ഇടുക -
VR റോബോട്ടിലെ ഡൗൺ ഐ സെൻസർ ഡിസ്ക് മൂവർ പ്ലേഗ്രൗണ്ട്ൽ ഒരു നിറമുള്ള ഡിസ്ക് കണ്ടെത്തുമ്പോൾ down_eye.near_objectകമാൻഡ് True എന്ന് റിപ്പോർട്ട് ചെയ്യുന്നു. പ്ലേഗ്രൗണ്ടിന്റെ തറയിലാണ് ഡിസ്കുകൾ സ്ഥിതിചെയ്യുന്നത്, ഫ്രണ്ട് ഐ സെൻസറിന് അവ കണ്ടെത്താൻ കഴിയില്ല, അതിനാൽ ഡൗൺ ഐ സെൻസർ ഡിസ്കുകൾ കണ്ടെത്തും. while ലൂപ്പിന്റെ അവസ്ഥയായി down_eye.near_object കമാൻഡ് ഡ്രാഗ് ചെയ്യുകയോ ടൈപ്പ് ചെയ്യുകയോ ചെയ്യുക, അങ്ങനെ നിങ്ങളുടെ പ്രോജക്റ്റിന്റെ ആദ്യ ഭാഗം ഇതുപോലെ കാണപ്പെടും:
ഡെഫ് മെയിൻ(): #1. down_eye.near_object(): wait(5, MSEC) അല്ലാത്തപ്പോൾ ആദ്യത്തെ ഡിസ്ക് ലേക്ക് ഡ്രൈവ് ചെയ്യുക. -
VR റോബോട്ട് ഒരു വസ്തുവിനെ കണ്ടെത്താത്തപ്പോൾ whileലൂപ്പിനുള്ളിലെ കമാൻഡുകൾ പ്രവർത്തിക്കും. ഡിസ്കുകളിൽ ഒന്നിൽ എത്താൻ, ഡിസ്ക് കണ്ടെത്തുന്നതുവരെ VR റോബോട്ട് മുന്നോട്ട് പോകേണ്ടതുണ്ട്.

-
while ലൂപ്പിനുള്ളിൽ ഒരു drive കമാൻഡ് ഡ്രാഗ് ചെയ്യുകയോ ടൈപ്പ് ചെയ്യുകയോ ചെയ്യുക, അങ്ങനെ പ്രോജക്റ്റിന്റെ ആദ്യ കമന്റ് വിഭാഗം ഇതുപോലെ കാണപ്പെടും:
#1. प्रक्षिती ആദ്യത്തെ ഡിസ്ക് ലേക്ക് ഡ്രൈവ് ചെയ്യുക, അതേസമയം down_eye.near_object(): drivetrain.drive(FORWARD) wait(5, MSEC) -
ഒരു ഡിസ്ക് കണ്ടെത്തുമ്പോൾ, അത് എടുക്കാൻ VR റോബോട്ട് ഡ്രൈവിംഗ് നിർത്തേണ്ടതുണ്ട്. whileലൂപ്പിന് പുറത്ത് ഒരു stop കമാൻഡ് വലിച്ചിടുക അല്ലെങ്കിൽ ടൈപ്പ് ചെയ്യുക, അങ്ങനെ പ്രോജക്റ്റിന്റെ ആദ്യ കമന്റ് വിഭാഗം ഇതുപോലെ കാണപ്പെടും:
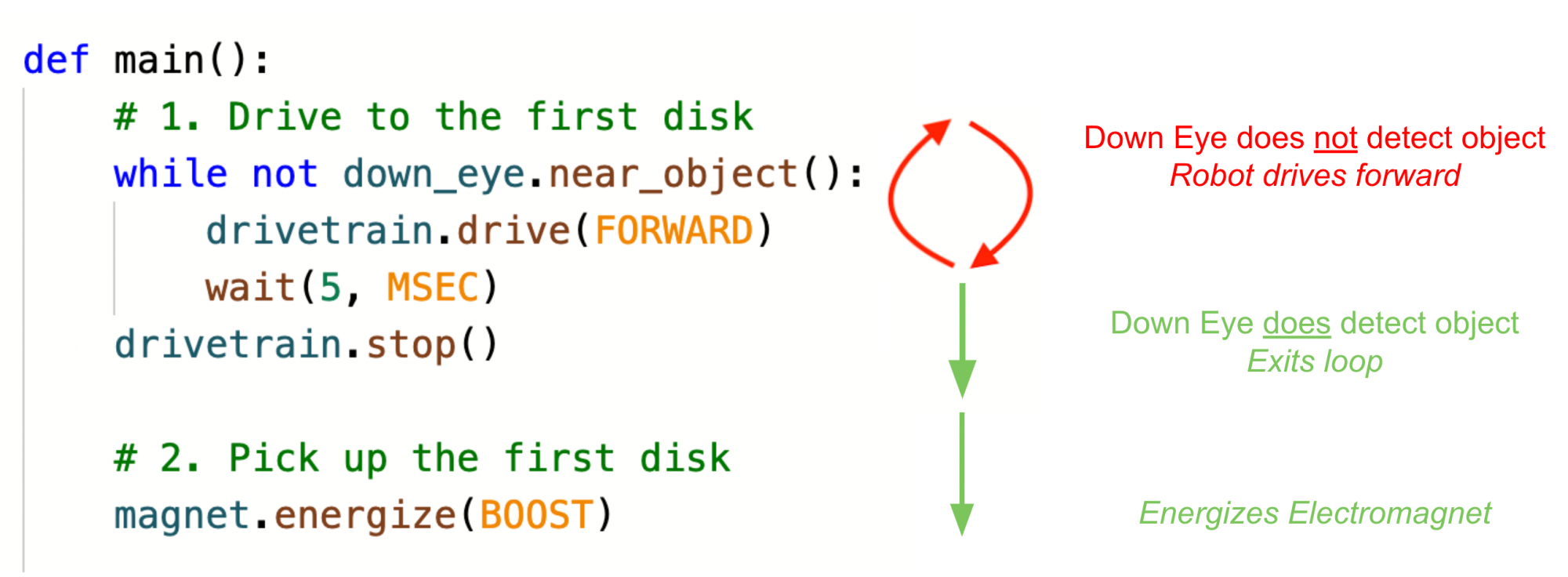
#1. प्रक्षिती ആദ്യത്തെ ഡിസ്ക് ലേക്ക് ഡ്രൈവ് ചെയ്യുക, അതേസമയം down_eye.near_object(): drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain.stop() - ശ്രദ്ധിക്കുക, ഡ്രൈവ് ഉം വെയിറ്റ് കമാൻഡുകളും ഉംലൂപ്പ് ഹെഡറിന് കീഴിലും ഇൻഡന്റ് ചെയ്തിരിക്കുന്നു, അതായത് കമാൻഡുകൾ ലൂപ്പിനുള്ളിലാണെന്നാണ്. ഏതൊക്കെ കമാൻഡുകളാണ് ശരിയായി ഇൻഡന്റ് ചെയ്തിരിക്കുന്നതെന്നും ഒരു ലൂപ്പിനുള്ളിലാണെന്നും സൂചിപ്പിക്കാൻ ചാരനിറത്തിലുള്ള വര സഹായിക്കും. stop കമാൻഡ് ലൂപ്പ് ഹെഡറുമായി യോജിക്കുന്നു, അതായത് stop കമാൻഡ് ലൂപ്പിന് പുറത്താണ്. കമാൻഡുകൾ ശരിയായി ഇൻഡന്റ് ചെയ്തിട്ടുണ്ടെന്ന് ഉറപ്പാക്കുക, അല്ലെങ്കിൽ പ്രോജക്റ്റ് പ്രതീക്ഷിച്ചതുപോലെ പ്രവർത്തിച്ചേക്കില്ല.
-
ഇനി, രണ്ടാമത്തെ കമന്റിന് ശേഷം energizeകമാൻഡ് വലിച്ചിടുകയോ ടൈപ്പ് ചെയ്യുകയോ ചെയ്തുകൊണ്ട് ഇലക്ട്രോമാഗ്നറ്റ് ഉപയോഗിച്ച് ഡിസ്ക് എടുക്കാൻ VR റോബോട്ടിനോട് നിർദ്ദേശിക്കുക, അങ്ങനെ പ്രോജക്റ്റിന്റെ രണ്ടാമത്തെ വിഭാഗം ഇതുപോലെ കാണപ്പെടും:
# 2. ആദ്യത്തെ ഡിസ്ക് മാഗ്നെറ്റ് എടുക്കുക. ഊർജ്ജസ്വലമാക്കുക(ബൂസ്റ്റ്) - പ്ലേഗ്രൗണ്ട് വിൻഡോ തുറന്നിട്ടില്ലെങ്കിൽ അത് തുറക്കുക. ഡിസ്ക് മൂവർ പ്ലേഗ്രൗണ്ട്തുറക്കുന്നുണ്ടെന്ന് ഉറപ്പാക്കുക, തുടർന്ന് പ്രോജക്റ്റ് പ്രവർത്തിപ്പിക്കുക.
-
ഡൗൺ ഐ സെൻസർ ആദ്യത്തെ നീല ഡിസ്ക് കണ്ടെത്തുന്നതുവരെ വിആർ റോബോട്ട് മുന്നോട്ട് ഓടുന്നു, ഡ്രൈവിംഗ് നിർത്തുന്നു, ഡിസ്ക് എടുക്കാൻ ഇലക്ട്രോമാഗ്നറ്റിനെ ഊർജ്ജസ്വലമാക്കുന്നു.

ആദ്യ ഡിസ്ക് എടുക്കുന്നതിനുള്ള പ്രോജക്റ്റ് ഫ്ലോ
അല്ല അവസ്ഥയുള്ള while ലൂപ്പ് ആദ്യ ഡിസ്ക് വിജയകരമായി എടുക്കുന്നതിന് സെൻസർ ഫീഡ്ബാക്ക് എങ്ങനെ ഉപയോഗിക്കുന്നുവെന്ന് ശ്രദ്ധിക്കുക:
- VR റോബോട്ട് മുന്നോട്ട് നീങ്ങുമ്പോൾഡൗൺ ഐ സെൻസർ ഒരു വസ്തുവിനെഅല്ലകണ്ടെത്തുന്നു.
- VR റോബോട്ടിലെ ഡൗൺ ഐ സെൻസർ ഒരു വസ്തുവിനെ കണ്ടെത്തിക്കഴിഞ്ഞാൽ, പ്രോജക്റ്റ് ലൂപ്പിനിടെന് പുറത്തുള്ള അടുത്ത കമാൻഡിലേക്ക് നീങ്ങുകയും ഡ്രൈവിംഗ് നിർത്തുകയും ചെയ്യുന്നു.
- പ്രോജക്റ്റ് തുടരുന്നു, അതിനാൽ VR റോബോട്ട് ഡിസ്ക് എടുക്കാൻ.
ഈ പാഠത്തിന്റെ ബാക്കി ഭാഗം തുടരാൻ അടുത്തത് ബട്ടൺ തിരഞ്ഞെടുക്കുക.