
Lektion 3: Verwenden von Sensoren und des Elektromagneten zum Aufnehmen einer Festplatte
Verwendung des Down-Eye-Sensors mit dem Elektromagneten
In dieser Lektion wird das gemeldete Sensorfeedback verwendet, um die gleiche Herausforderung wie in Lektion 2 zu lösen. Der VR-Roboter hebt die erste blaue Scheibe auf und bewegt sie in das blaue Tor.
- Starten Sie ein neues Projekt und wählen Sie den Disk Mover Playground, wenn Sie dazu aufgefordert werden.
-
Benennen Sie das Projekt Unit8Lesson3.

-
Fügen Sie dem Projekt vier Kommentare hinzu. Fügen Sie Kommentare zu jedem der Schritte hinzu, die erforderlich sind, damit der VR-Roboter auf die erste Festplatte fährt, diese aufnimmt und zum blauen Ziel zurückkehrt.
def main(): # 1. Laufwerk auf die erste Festplatte # 2. Nimm die erste Scheibe # 3. Fahre zum Ziel # 4. Legen Sie die Festplatte in das Ziel -
Ziehen oder geben Sie eine while-Schleife mit einer NOT-Bedingung in den Arbeitsbereich unter dem ersten Kommentar ein, damit Ihr Projekt wie folgt aussieht:
def main(): #1. Laufwerk auf die erste Festplatte , wenn nicht Bedingung: wait(5, MS) # 2. Nimm die erste Scheibe # 3. Fahre zum Ziel # 4. Legen Sie die Festplatte in das Ziel -
Der Befehl down_eye.near_object meldet True , wenn der Down Eye Sensor am VR-Roboter eine farbige Festplatte auf dem Disk Mover Playground erkennt. Die Scheiben befinden sich auf dem Boden des Spielplatzes und können vom Front Eye Sensor nicht erkannt werden, daher erkennt der Down Eye Sensor die Scheiben. Ziehen oder geben Sie den Befehl down_eye.near_object als Bedingung der while-Schleife ein, sodass der erste Abschnitt Ihres Projekts wie folgt aussieht:
def main(): #1. Laufwerk auf die erste Festplatte , wenn nicht down_eye.near_object(): wait(5, MS) -
Die Befehle innerhalb der while-Schleife werden ausgeführt, wenn der VR-Roboter KEIN Objekt erkennt. Um eine der Festplatten zu erreichen, muss der VR-Roboter vorwärts fahren, bis die Festplatte erkannt wird.

-
Ziehen oder geben Sie einen Laufwerksbefehl in die while-Schleife ein, sodass der erste Kommentarabschnitt des Projekts wie folgt aussieht:
#1. Fahren Sie auf die erste Festplatte , wenn nichtdown_eye.near_object () :drivetrain.drive (FORWARD) wait(5, MSEC) -
Wenn eine Festplatte erkannt wird, muss der VR-Roboter aufhören zu fahren, um sie aufzunehmen. Ziehen oder geben Sie einen Stoppbefehl außerhalb der while-Schleife ein, sodass der erste Kommentarabschnitt des Projekts wie folgt aussieht:
#1. Fahren Sie auf die erste Festplatte, wenn nichtdown_eye.near_object () :drivetrain.drive (FORWARD) wait(5, MSEC) drivetrain.stop() - Beachten Sie, dass die Befehle drive und wait unter der Schleifenüberschrift while eingerückt sind, was bedeutet, dass sich die Befehle innerhalb der Schleife befinden. Die graue Linie kann auch dazu beitragen, anzuzeigen, welche Befehle richtig eingerückt und innerhalb einer Schleife sind. Der Stoppbefehl stimmt mit dem Schleifenkopf überein, was bedeutet, dass sich der Stoppbefehl außerhalb der Schleife befindet. Stellen Sie sicher, dass die Befehle korrekt eingerückt sind, da das Projekt sonst möglicherweise nicht wie erwartet ausgeführt wird.
-
Weisen Sie nun den VR-Roboter an, die Festplatte mit dem Elektromagneten aufzunehmen, indem Sie nach dem zweiten Kommentar einen Erregungsbefehl ziehen oder eingeben, sodass der zweite Abschnitt des Projekts wie folgt aussieht:
# 2. Nehmen Sie den ersten Scheibenmagneten auf . Erregen (BOOST) - Öffnen Sie das Playground-Fenster , wenn es noch nicht geöffnet ist. Stellen Sie sicher, dass sich der Disk Mover Playground öffnet, und führen Sie das Projekt aus.
-
Der VR-Roboter fährt vorwärts, bis die erste blaue Platte vom Down Eye Sensor erkannt wird, stoppt die Fahrt und aktiviert den Elektromagneten, um die Platte aufzunehmen.

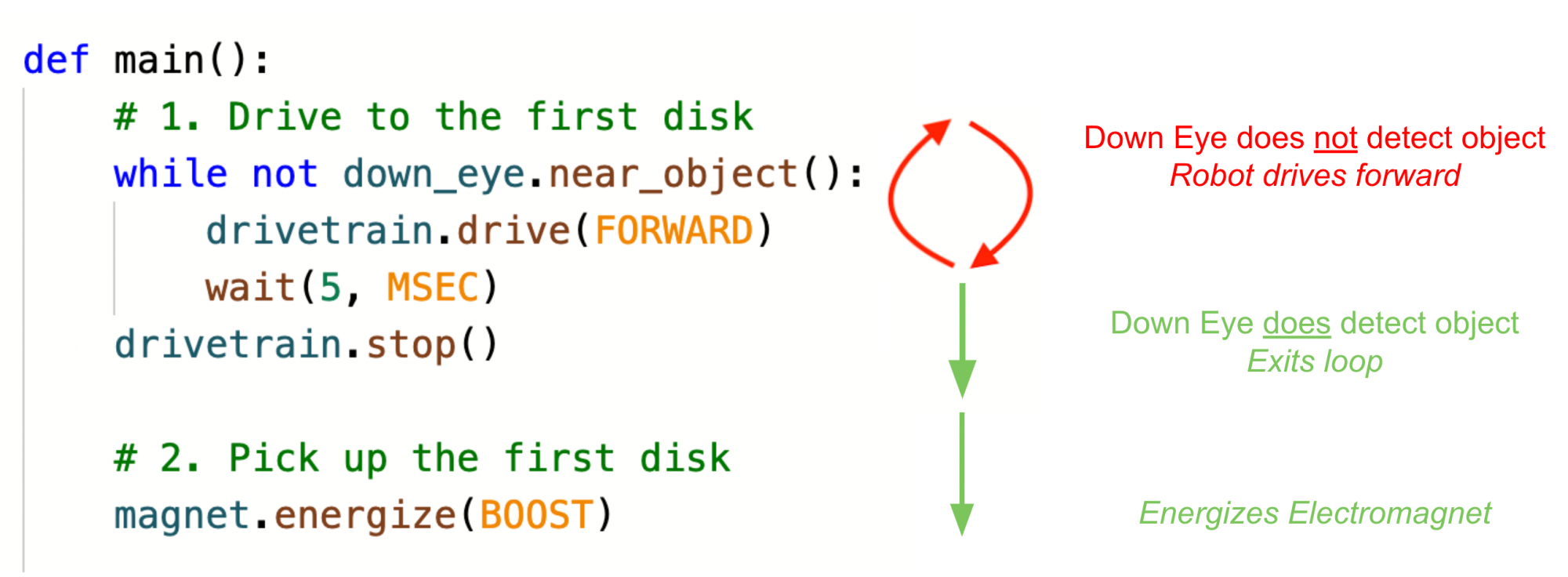
Projektablauf zum Aufnehmen der ersten Festplatte
Beachten Sie, wie die while-Schleife mit einer NICHT-Bedingung das Sensorfeedback verwendet, um die erste Festplatte erfolgreich aufzunehmen:
- Der VR-Roboter fährt vorwärts , während der Down Eye Sensor kein Objekt erkennt.
- Sobald der Down Eye Sensor am VR-Roboter ein Objekt erkennt, wechselt das Projekt zum nächsten Befehl außerhalb der while-Schleife und stoppt die Fahrt.
- Das Projekt wird fortgesetzt, also aktiviert der VR-Roboter den Elektromagneten, um die Scheibe aufzunehmen.
Wählen Sie die Schaltfläche Weiter um mit dem Rest dieser Lektion fortzufahren.