
Perencanaan Proyek dalam Kompetisi VEX

Membangun Perilaku untuk Rutinitas Otonom
Kompetisi Robotik VEX memerlukan perencanaan rutinitas otonom untuk Pertandingan Keterampilan Pemrograman 60 detik dari Tantangan Keterampilan Robot, dan untuk Periode Otonom 15 detik dari permainan tahun berjalan Pemrograman robot agar berjalan secara mandiri memerlukan pemecahan apa yang perlu dilakukan robot menjadi kode berbasis perilaku yang dapat diprogram.
Berikut adalah beberapa perilaku khas untuk Robot kompetisi VEX:
- Mengemudi maju dan mundur
- Belok kanan dan kiri
- Meraih objek permainan
- Menempatkan objek permainan dengan tepat
- Menyortir antara objek permainan yang berbeda
Setelah Anda membuat instruksi dasar untuk jenis perilaku ini, menjalankan rutinitas otonom yang sukses berarti merencanakan urutan tindakan ini!
 Motivasi Diskusi
-
Perilaku Otomatis
Motivasi Diskusi
-
Perilaku Otomatis
Tampilkan gambar lapangan Kompetisi Robotik VEX, baik untukpertandingan tahun iniatau Anda dapat menggunakan gambar ini dari Tower Takeover Kompetisi Robotik VEX 2019-2020.
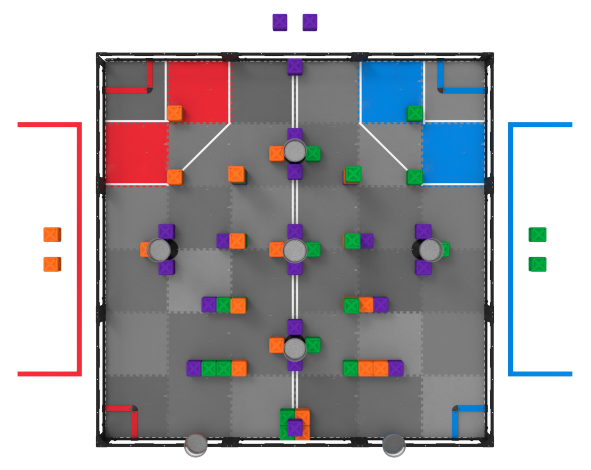
Mulailah dengan memberi siswa tujuan untuk direncanakan tetapi pastikan tujuan tersebut sesuai dengan tingkat pengalaman mereka. Manipulator dan sensor robot mungkin belum dibahas, jadi, pertahankan tujuan yang dapat dicapai hanya dengan gerakan dasar. Misalnya, minta mereka merencanakan cara bergerak dari pojok merah atas di lapangan di atas ke kubus ungu kanan bawah tanpa menyentuh apa pun di lapangan.
T:Jika Anda perlu bergerak dari pojok kiri atas ke pojok kanan bawah, apa langkah pertama Anda dalam merencanakannya?
J:Jawaban dapat bervariasi tetapi harus berhubungan dengan memecah tugas menjadi perilaku yang dapat diprogram lebih kecil, atau perilaku yang sesuai dengan instruksi VEXcode V5.
T:Apa perilaku pertama robot?
J:Jawaban dapat berupa berbelok ke suatu arah atau melaju ke depan. Jawaban yang dapat diterima semuanya harus sesuai dengan instruksi tunggal.
T:Apa yang perlu Anda lakukan untuk memprogram belokan atau mengemudi? Pengukuran apa yang Anda perlukan?
A:Untuk program otonom tanpa sensor, jarak belok dan berkendara yang tepat diperlukan.
 Perluas Pembelajaran Anda
-
Sketsa dan Psuedocode
Perluas Pembelajaran Anda
-
Sketsa dan Psuedocode
Untuk memperluas aktivitas ini, mintalah siswa Anda untuk membuat sketsa medan tantangan (nyata atau buatan) sesuai skala dan kemudian menulis pseudocode (Google / .docx / .pdf ) untuk program otonom berdurasi 15 detik. Pseudocode belum diperkenalkan di lab ini tetapi, dengan perencanaan menggunakan perilaku sederhana, para siswa sudah mulai berlatih menulis pseudocode. Praktik penulisan pseudocode, seperti yang dijelaskan dalam tautan, tidak harus diperkenalkan tetapi rencana siswa harus mencakup penguraian masalah menjadi langkah-langkah yang cukup mendasar untuk dianggap sebagai pseudocode.