
Lập kế hoạch dự án trong các cuộc thi VEX

Xây dựng hành vi cho thói quen tự chủ
Cuộc thi Robot VEX yêu cầu lập kế hoạch cho một quy trình tự động cho Trận đấu Kỹ năng Lập trình kéo dài 60 giây của Thử thách Kỹ năng Robot và cho Giai đoạn Tự động kéo dài 15 giây của trò chơinăm hiện tại. Việc lập trình cho robot chạy tự động đòi hỏi phải phân tích những gì robot cần làm thành mã lập trình dựa trên hành vi.
Sau đây là một số hành vi điển hình của Robot thi đấu VEX:
- Lái xe tiến và lùi
- Rẽ phải và trái
- Nắm bắt một đối tượng trò chơi
- Đặt chính xác một đối tượng trò chơi
- Sắp xếp giữa các đối tượng trò chơi khác nhau
Khi bạn đã xây dựng được những hướng dẫn cơ bản cho các loại hành vi này, việc thực hiện một thói quen tự chủ thành công chỉ đơn giản có nghĩa là lập kế hoạch thứ tự cho các hành động này!
![]() Thảo luận thúc đẩy
-
Hành vi tự động
Thảo luận thúc đẩy
-
Hành vi tự động
Hiển thị hình ảnh về sân thi đấu VEX Robotics cho trậnnăm hiện tạihoặc bạn có thể sử dụng hình ảnh này từ Tháp tiếp quản cuộc thi VEX Robotics 2019-2020.
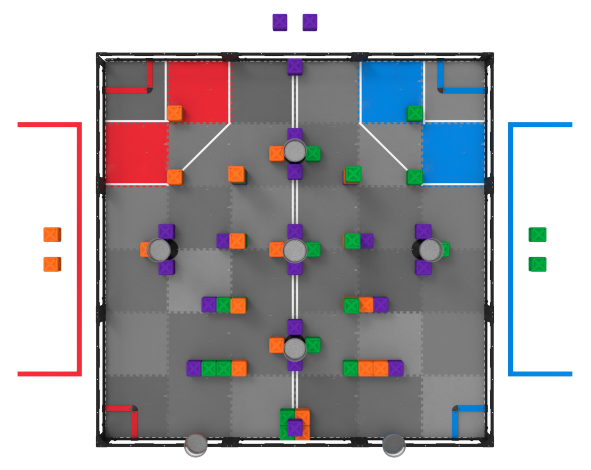
Bắt đầu bằng cách cung cấp cho học sinh một mục tiêu để lập kế hoạch nhưng phải đảm bảo rằng mục tiêu đó phù hợp với trình độ của họ. Bộ điều khiển và cảm biến của robot có thể chưa được thảo luận, do đó, hãy giữ mục tiêu có thể đạt được chỉ bằng các chuyển động cơ bản. Ví dụ, yêu cầu họ lập kế hoạch di chuyển từ góc đỏ trên cùng trong trường ở trên đến khối lập phương màu tím ở góc dưới bên phải mà không chạm vào bất kỳ thứ gì khác trên trường.
Q:Nếu bạn cần di chuyển từ góc trên cùng bên trái đến góc dưới bên phải, bước đầu tiên trong kế hoạch đó của bạn là gì?
A:Câu trả lời có thể khác nhau nhưng phải liên quan đến việc chia nhỏ nhiệm vụ thành các hành vi có thể lập trình nhỏ hơn hoặc các hành vi tương ứng với các hướng dẫn VEXcode V5.
Q:Hành vi đầu tiên của robot là gì?
A:Câu trả lời có thể là rẽ theo một hướng hoặc lái về phía trước. Câu trả lời được chấp nhận phải tương ứng với các hướng dẫn đơn lẻ.
Q:Bạn cần làm gì để lập trình rẽ hoặc lái xe? Bạn cần những phép đo nào?
A:Đối với một chương trình tự động không có cảm biến, cần phải có khoảng cách lái xe và rẽ chính xác.
![]() Mở rộng việc học của bạn
-
Phác thảo và Mã giả
Mở rộng việc học của bạn
-
Phác thảo và Mã giả
Để mở rộng hoạt động này, hãy yêu cầu học sinh phác thảo một trường thử thách (thực tế hoặc được tạo ra) theo tỷ lệ và sau đó viết mã giả (Google / .docx / .pdf ) cho chương trình tự động kéo dài 15 giây. Mã giả không được giới thiệu trong phòng thí nghiệm này nhưng bằng cách lập kế hoạch với các hành vi đơn giản, sinh viên đã bắt đầu thực hành viết mã giả. Thực hành viết mã giả, như được mô tả trong liên kết, không nhất thiết phải được giới thiệu nhưng kế hoạch của sinh viên nên bao gồm việc phân tích vấn đề thành các bước đủ cơ bản để được coi là mã giả.