


自律的なルーチンのための行動の構築
VEX ロボット競技会では 秒間の自律期間のための自律ルーチンを計画する必要があります。 ロボットが自律的に動作するようにプログラミングするには、ロボットが実行する必要がある操作をプログラム可能な動作ベースのコードに分解する必要があります。
VEX 競技用ロボットの典型的な動作は次のとおりです。
-
前進と後進
-
右折と左折
-
ゲームオブジェクトを取得する
-
ゲームオブジェクトを正確に配置する
-
異なるゲームオブジェクト間のソート
これらのタイプの動作の基本的な指示を作成したら、自律ルーチンを成功させるには、これらのアクションの順序を計画するだけです。
![]() 議論を促す
-
自動化された動作
議論を促す
-
自動化された動作
VEX ロボット競技フィールドの画像を表示します のゲーム用 か、2019-2020 VEX ロボット競技タワー テイクオーバーのこの画像を使用できます。
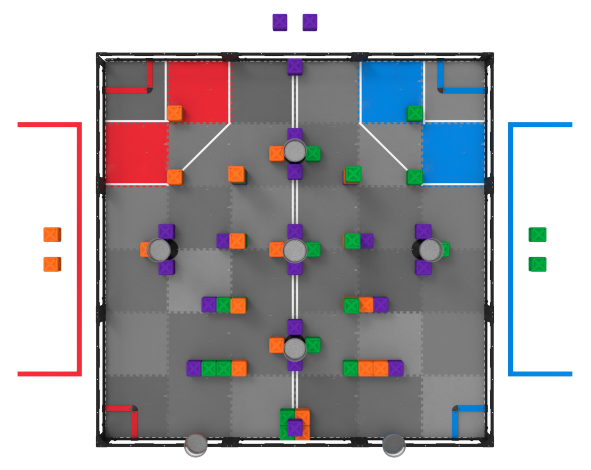
まず、生徒に計画する目標を与えますが、それが生徒の経験レベルに適したものであることを確認してください。 ロボットのマニピュレータとセンサーについてはまだ説明されていない可能性があるため、基本的な動きだけで目的を達成できるようにします。 たとえば、上のフィールドの一番上の赤い角から、フィールド上の他のものに触れずに右下の紫色の立方体まで移動する方法を計画するように依頼します。
質問: 左上隅から右下隅に移動する必要がある場合、それを計画するための最初のステップは何ですか?
回答: 回答はさまざまですが、タスクをより小さなプログラム可能な動作、または
VEXcode V5 命令に対応する動作に分割することに関連している必要があります。
質問: ロボットの最初の動作は何ですか?
回答: 答えは、ある方向に曲がるか、前進するかのどちらかです。
許容される回答はすべて単一の指示に対応している必要があります。
質問: ターンや運転をプログラムするには何をする必要がありますか?
どのような測定が必要ですか?
A: センサーのない自律プログラムの場合、正確な旋回距離と走行距離が必要になります。
![]() 学習を拡張する
-
スケッチと疑似コード
学習を拡張する
-
スケッチと疑似コード
このアクティビティを拡張するには、生徒にチャレンジ フィールド (実際の または作成したフィールド) をスケッチしてスケールを決め、15 秒間の自律プログラムの疑似コード (Google .docx ) を記述するように指示します。 このラボでは疑似コードは導入されていませんが、簡単な動作を計画することで、学生たちはすでに疑似コードの作成の練習を始めています。 リンク内で説明されているように、疑似コードを書く練習を導入する必要はありませんが、学生の計画には、疑似コードと見なされるほど基本的なステップに問題を分解することが含まれている必要があります。